一种煤矿巷道空地巡检机器人及巡检方法
1.本发明属于机器人技术领域,尤其涉及一种煤矿巷道空地巡检机器人及巡检方法。
背景技术:
2.随着我国煤炭行业的大力发展,对于可以在特殊状况下进行检测的机器人的需求增大。目前,煤矿井下作业环境,时常发生一些危险情况,例如五种常见的灾害,分别是矿井水灾、矿井火灾、矿井瓦斯伤害、矿井煤尘灾害、矿井顶板灾害等,在这些灾害情况下,考虑到工作人员的安全,以及降低工人的劳动强度,就需要机器人进行巡检检测。
3.目前常见的井下巡检机器人,主要分为轨道式巡检机器人、行走式巡检机器人和无人机式巡检机器人三类,其中轨道式巡检机器人一般是将机器人悬挂在轨道上,通过驱动轮使机器人沿轨道行走,造价高,灵活度低;行走式巡检机器人一般采用履带或轮胎进行行走,在遇到一些障碍物时,很难再前进,就不能更加完整地对井下进行检测;无人机式巡检机器人一般采用旋翼无人机,尺寸很大,在狭小的井下空间内,操作灵活度受到了很大的局限,对井下环境的检测有很大难度。由此,现有技术中,并没有兼备地面行走和空中飞行的巡逻机器人。
技术实现要素:
4.本发明的目的在于提供一种煤矿巷道空地巡检机器人及巡检方法,可实现地面行走和空中飞行。为实现上述目的,本发明采用如下技术方案:一种煤矿巷道空地巡检机器人,包括:履带车;四翼扑翼飞行器,通电飞行以进行巡检,包括:起落架,通电以与所述履带车的顶面磁性连接;所述起落架的顶端与一机架的下底座连接;所述机架还包括一上底座,所述上底座和下底座之间通过左右设置的碳纤杆连接,所述上底座上转动设置一对左右设置的翼臂,每根所述翼臂的外端均延伸出所述上底座,内端均可沿上底座上的弧形槽移动;所述;每根所述翼臂上均设置一扑翼机构;每根所述碳纤杆上均套设一延伸出所述下底座的翼根,每根所述翼根的外端和对应的翼臂的外端之间通过一臂根连杆连接;每根臂根连杆上均连接一对扑翼;所述扑翼的内侧与对应的臂根连杆固定连接,所述扑翼的顶端形成一杆体以与一扑翼机构的输出端可拆卸连接;所述扑翼机构,用于驱动对应的一对所述扑翼张合,包括形成所述输出端的一对摇杆,一对所述摇杆呈上下设置且与所述翼臂转动连接;一对所述摇杆转动连接于同一点;每根所述摇杆上均连接一所述扑翼;每根摇杆与一个二级减速器从动轮之间均通过一曲柄连杆转动连接,两个所述二级减速器从动轮之间外啮合;两个所述二级减速器从动轮均转
动安装于所述翼臂且其中一个二级减速器从动轮与一个二级减速器主动轮外啮合;所述二级减速器主动轮与一级减速器从动轮形成一双联齿轮,所述一级减速器从动轮转动安装于翼臂且与一级减速器主动轮外啮合,所述一级减速器主动轮与电机的输出轴连接,所述电机固定于所述翼臂;主控制系统和副控制系统,所述主控制系统设置于所述履带车上,所述副控系统设置于所述四翼扑翼飞行器的机架上;所述机架上还设置一摄像单元,所述摄像单元依次与副控制系统、主控制系统信号连接。
5.优选地,进一步包括一与所述主控制系统信号连接且设置于所述履带车上的视觉机构,所述视觉机构包括:眼壳,包括可拆卸连接的前壳体和后壳体;所述眼壳转动设置于一视觉支撑架上;所述眼壳的外壁上设置补光灯;所述眼壳的内部设置一仿生眼;所述仿生眼包括固定于所述后壳体上的第一直线舵机,所述第一直线舵机的舵机推杆可沿左右方向移动且与第一滑块连接;所述第一滑块连接第二直线舵机的外壳,所述第二直线舵机的舵机推杆可沿上下方向移动且与第二滑块的后端连接;所述第二滑块的前端与一球面端头球副连接;所述球面端头的前端固定于一伸缩套杆的后端,所述伸缩套杆的前端固定于一眼球,所述眼球与眼壳的前壳体球副连接。
6.优选地,所述机架的上底座上设置一用于调节两翼臂之间夹角以使得四翼扑翼飞行器进行俯仰的翼臂夹角调节机构,包括一夹角连杆,所述夹角连杆位于两所述翼臂之间,所述夹角连杆的左端有一左滑槽,一立柱穿过左滑槽卡设于左侧的翼臂上,右端有一右滑槽,一立柱穿过右滑槽卡设于右侧的翼臂;两所述立柱与上底座上的弧形槽配合设置;所述夹角连杆的上段固定于第三直线舵机的舵机推杆,所述第三直线舵机的舵机推杆可沿前后方向移动;所述第三直线舵机的机身固定于所述上底座。
7.优选地,所述机架的下底座上设置一使得四翼扑翼飞行器发生偏航的转向机构,包括一固定于所述下底座上的舵机,所述舵机的输出轴固定于一尾舵。
8.优选地,所述履带车顶面上设置一电磁铁;所述起落架包括一支撑架,所述支撑架的上端形成一连接件以与所述机架的下底座可拆卸连接,所述支撑架上固定一无线充电接收器,所述无线充电接收器的输入端连接一无线充电器;所述无线充电器套设在所述电磁铁上;所述无线充电接收器上设置一软铁片;所述电磁铁通电产生磁性吸引所述软铁片以连接履带车与四翼扑翼飞行器。
9.优选地,所述主控制系统包括:pc分析模块和主控制器,所述pc分析模块用于接收并分析仿生眼输出的环境信息和主控制器的输出信息,之后输出指令信息至主控制器,同时pc分析模块与地面控制中心进行信息传递;所述主控制器用于接收pc分析模块的输出指令信息并输出相应信号;所述主控制器的第一输出端信号连接一电机驱动模块的输入端,第二输出端信号连接一电流控制器的输入端,第三输出端信号连接一遥控模块的输入端,第四输出端与视觉机构的第一直线舵机和第二直线舵机连接;所述地面控制中心,用于地面人员进行远程监测与控制;所述电机驱动模块,用于控制履带机的速度,所述电机驱动模块的输出端与履带
机上的履带车电机信号连接;所述电流控制器用于控制电磁铁的通电和断电,所述电流控制器的输出端与电磁铁的正负极连接,主控制器发送调节信号给电流控制器,电流控制器根据信号调节电流大小,实现电磁铁的通电和断电;所述遥控模块,用于改变翼臂夹角和尾舵的角度,所述遥控模块的输出端与所述副控制系统的输入端信号连接。
10.优选地,所述副控制系统包括:接收器,用于接收所述遥控模块的输出信息,所述接收器的第一输出端与电调模块的输入端信号连接,第二输出端与翼臂夹角调节机构的第三直线舵机信号连接,第三输出端与转向机构的舵机信号连接;所述电调模块,用于对扑翼机构的电机调速,所述电调模块的输出端信号连接所述电机;电源模块和电量数传模块,所述电源模块用于获取四翼扑翼飞行器电池的电量,之后通过电量数传模块将电池量信号发送给pc分析模块,pc分析模块分析电量信息和行程信息,确定是否发送返航指令;其中,所述四翼扑翼飞行器电池设置于所述机架的上底座;所述履带车上设置履带车电池,所述履带车电池依次通过无线充电器、无线充电接收器、电源模块给四翼扑翼飞行器电池充电;无线图传模块,四翼扑翼飞行器的摄像单元通过无线图传模块,将图像信息发送至pc分析模块。
11.一种煤矿巷道空地巡检方法,所述的煤矿巷道空地巡检机器人,包括以下步骤:步骤1:将巷道信息输入至主控制系统,所述主控制系统进行路径规划,之后根据规划完成的路径驱动履带车上的履带车电机运行;在履带车运行过程中,视觉机构通过改变仿生眼的位置以获取多方向信息,仿生眼输出图像信息至主控制系统,主控制系统对图像信息进行处理,并判断履带车前方是否有障碍物;若是,则主控制系统发出障碍指令,并分析履带车是否能继续前行;若履带车无法继续前行,则执行步骤2;步骤2:主控制系统连通副控制系统,副控制系统驱动扑翼机构的电机运行以实现四翼扑翼飞行器的飞行;之后,主控制系统控制履带车上的电磁铁断电,四翼扑翼飞行器脱离履带车;在飞行过程中,四翼扑翼飞行器上的摄像单元实时采集巷道图像信息,并将其传输至主控制系统;运行设定时间后,副控制系统获取四翼扑翼飞行器电池的电量,之后将电池量信号发送给主控制系统,主控制系统分析电量信息和行程信息,确定是否发送返航指令;如是,则执行步骤3;步骤3:主控制系统发送返航指令至副控制系统,副控制系统控制转向机构的第三直线舵机运行,使得四翼扑翼飞行器返航;步骤4:履带车上的无线充电器依次连通四翼扑翼飞行器上的无线充电接收器、副控制系统以对四翼扑翼飞行器电池充电。
12.与现有技术相比,本发明的优点为:(1)本发明的空地巡检机器人兼具地面行走和空中飞行,履带车可以进行地面行走,当履带车遇到阻碍物不能前行,可以利用四翼扑翼飞行器接着进行一段路线的巡检。
13.(2)四翼扑翼飞行器采用“合拢-打开”高升力机制,具有很好的飞行性能。
14.(3)仿生眼的使用,使得整个视觉系统的体积大大缩减,灵活度得到提高,克服了传统视觉系统因云台的使用整体尺寸过大的问题。
15.(4)利用无线充电技术,四翼扑翼飞行器的续航能力得到提升,避免了常规飞行器因电量问题续航能力不足的问题。
附图说明
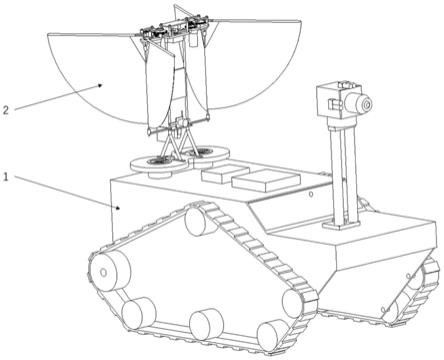
16.图1为本发明一实施例的煤矿巷道空地巡检机器人的立体图;图2为图1中履带车的立体图;图3为图1中四翼扑翼飞行器的立体图;图4为图2中视觉机构的爆炸图;图5为图2中视觉机构的剖视图;图6为图4中仿生眼的结构图;图7为图6中中仿生眼的球面端头球心位置点与视觉方向对应图;图8为四翼扑翼飞行器中机架的结构图;图9为四翼扑翼飞行器中扑翼机构的结构图;图10为四翼扑翼飞行器中翼臂夹角调节机构的结构图;图11为四翼扑翼飞行器中转向机构的结构图;图12为四翼扑翼飞行器中起落架的结构图;图13为主控制系统和副控制系统的控制流程图;图14为煤矿巷道空地巡检机器人的运行流程图;图15为扑翼机构驱动扑翼贴合的状态图;图16为扑翼机构驱动扑翼张开时扑翼机构状态图;图17为扑翼机构驱动扑翼贴合时扑翼机构状态图;图18为仿生眼中眼球识别与传递环境信息流程图。
17.其中,1-履带车,2-四翼扑翼飞行器,3-固定件,4-电磁铁,5-无线充电器 ,6-履带车电池,7-主控制系统,24-pc分析模块,25-地面控制中心,71-主控制器,72-电机驱动模块,73-电流控制器,74-遥控模块,8-视觉机构,81-眼壳,82-旋转电机,83-补光灯,84-仿生眼,841-第一直线舵机,842-第二直线舵机,843-球面端头,844-伸缩套杆,845-眼球,8411-第一滑块,8421-第二滑块,8431-球面端头球心,8432-球心平面,8451-眼球球心 ,8452-视觉方向,8453-微型传感器,8454-摄像头,8455-信号传输模块,9-视觉支撑架,10-履带轮,11-履带,12-履带车电机,13-底盘,14-副控制系统,141-接收器,142-电调模块,143-电源模块,144-电量数传模块,145-无线图传模块,15-机架,151-下底座,152-上底座,153-翼臂,154-翼根,155-碳纤杆,156-臂根连杆,16-扑翼机构,161-曲柄连杆,162-电机,163-一级减速器主动轮,164-一级减速器从动轮,165-二级减速器主动轮,166-二级减速器从动轮,167-摇杆,17-扑翼,18-翼臂夹角调节机构,181-第三直线舵机, 182-夹角连杆,19-转
向机构,191-舵机 ,192-尾舵,20-起落架,201-连接件 ,202-支撑架,203-软铁片,21-无线充电接收器,22-摄像单元,23-四翼扑翼飞行器电池。
具体实施方式
18.下面将结合示意图对本发明进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本发明的限制。
19.如图1~15所示,一种煤矿巷道空地巡检机器人,包括履带车1和四翼扑翼飞行器2。
20.四翼扑翼飞行器2,通电飞行以进行巡检,包括:起落架20、机架15、扑翼机构16、翼臂夹角调节机构18、转向机构19、无线充电接收器21、摄像单元22、四翼扑翼飞行器电池23、副控制系统14。扑翼机构16分为左、右扑翼机构16,左、右扑翼机构16上各连接着两个扑翼17,翼臂夹角调节机构18放置在机架15上方,转向机构19放置在机架15下方,起落架20放置在机架15最下方,支撑机身,连接履带车1。
21.在本实施例中,上下方向是指沿z方向;左右方向是指沿x方向、前后方向是指沿y方向。
22.起落架20,通电以与履带车1的顶面磁性连接,即履带车1和四翼扑翼飞行器2通过电磁铁4与起落架20进行连接,电磁铁4通过固定件3与履带车1连接在一起,通过控制电磁铁4通电断电,当电磁铁4通电,电磁铁4产生磁力,吸引四翼扑翼飞行器2的起落架20,使四翼扑翼飞行器2固定在履带车1上;当电磁铁4断电,磁力消失,四翼扑翼飞行器2脱离履带车1的连接,四翼扑翼飞行器2的质量很轻,给电磁铁4通小电流,就可以产生足够的吸力来稳定四翼扑翼飞行器2,耗电量很低。其中,在电磁铁4断电之前,四翼扑翼飞行器2的扑翼机构16已开始工作运行。
23.具体的,如图2所示,履带车1顶面上设置一电磁铁4;如图3、图12所示,起落架20的顶端与一机架15的下底座151连接;起落架20包括支撑架202、连接件201、软铁片203;支撑架202的上端形成一连接件201以与机架15的下底座151可拆卸连接,支撑架202上固定一无线充电接收器21,无线充电接收器21的输入端连接一无线充电器5;无线充电器5套设在电磁铁4上;无线充电接收器21上设置一软铁片203;电磁铁4通电产生磁性吸引软铁片203以连接履带车1与四翼扑翼飞行器2。
24.四翼扑翼飞行器2的机架15还包括上底座152、翼臂153、翼根154、碳纤杆155和臂根连杆156,如图8所示。
25.具体的,上底座152和下底座151之间通过左右设置的碳纤杆155连接,上底座152上转动设置一对左右设置的翼臂153,具体的,翼臂153通过销钉转动连接在上底座152上;每根翼臂153的外端均延伸出上底座152,内端均可沿上底座152上的弧形槽移动;每根翼臂153上均设置一扑翼机构16;每根碳纤杆155上均套设一延伸出下底座151的翼根154,每根翼根154的外端和对应的翼臂153的外端之间通过一臂根连杆156固定连接;每根臂根连杆156上均连接一对扑翼17;扑翼17的内侧与对应的臂根连杆156固定连接(如粘接),扑翼17的顶端形成一杆体以与一扑翼机构16的输出端可拆卸连接。
26.扑翼机构16,用于驱动对应的一对扑翼17张合,如图9所示,包括曲柄连杆161、电
机162、一级减速器主动轮163、一级减速器从动轮164、二级减速器主动轮165、二级减速器从动轮166和摇杆167。
27.具体的,一对摇杆167形成翼机构的输出端,一对摇杆167呈上下设置且与翼臂153转动连接;一对摇杆167转动连接于同一点;每根摇杆167上均连接一扑翼17;每根摇杆167与一个二级减速器从动轮166之间均通过一曲柄连杆161转动连接,两个二级减速器从动轮166之间外啮合;两个二级减速器从动轮166均转动安装于翼臂153且其中一个二级减速器从动轮166与一个二级减速器主动轮165外啮合;二级减速器主动轮165与一级减速器从动轮164形成一双联齿轮,一级减速器从动轮164转动安装于翼臂153且与一级减速器主动轮163外啮合,一级减速器主动轮163与电机162的输出轴连接,电机162固定于翼臂153。
28.当电机162工作时,依次带动一级减速器主动轮163、一级减速器从动轮164、二级减速器主动轮165、二级减速器从动轮166、曲柄连杆161、摇杆167、扑翼17动作。每个摇杆167的运动幅度为60
º
左右,如图15、图17所示当扑翼机构16的两个摇杆167同时达到最高点时,同一侧的一对摇杆167上固定的扑翼17能够正好贴合,如图3、图16所示两扑翼17之间的最大夹角为120
º
左右,充分地利用“合拢-打开”机制,扑翼17的膜采用pvc薄膜制作,各种齿轮采用树脂材料制作。
29.翼臂夹角调节机构18,用于调节两翼臂153之间夹角以使得四翼扑翼飞行器2进行俯仰,如图3、图10所示,设置于机架15的上底座152上,包括第三直线舵机181和夹角连杆182,夹角连杆182位于两翼臂153之间,夹角连杆182的左端有一左滑槽,一立柱穿过左滑槽卡设于左侧的翼臂153上,右端有一右滑槽,一立柱穿过右滑槽卡设于右侧的翼臂153;两立柱均与上底座152上的弧形槽配合设置;夹角连杆182的上段固定于第三直线舵机181的舵机推杆,第三直线舵机181的舵机推杆可沿前后方向移动;第三直线舵机181的机身固定于上底座152。
30.每根翼臂153均形成一个绕着销钉转动的杠杆,当第三直线舵机181工作时,第三直线舵机181带动夹角连杆182,夹角连杆182带动左右两个翼臂153的内端移动(立柱在弧形槽内移动),翼臂153的另一端(外端)通过杠杆原理也会移动,左右两翼臂153之间夹角发生改变。夹角连杆182上带有滑槽(左滑槽和右滑槽),当直线舵机处在中间位置时,两翼臂153与夹角连杆182处在一条直线上,夹角正好为180
º
,第三直线舵机181向前向后行程一样,改变相同夹角。
31.转向机构19,使得四翼扑翼飞行器2发生偏航,如图11所示,设置于机架15的下底座151上,包括一固定于下底座151上的舵机191,舵机191的输出轴固定于一尾舵192。当舵机工作时,舵机的输出轴转动以带动尾舵192发生角度转动。
32.履带车1包括固定件3、电磁铁4、无线充电器5、履带车电池6、主控制系统7、视觉机构8、视觉支撑架9、履带轮10、履带11、履带车电机12、底盘13。其中,履带轮10、履带11、履带车电机12、底盘13之间的连接关系为现有技术,在此不再赘述。
33.视觉机构8,与主控制系统7信号连接且设置于履带车1上,如图4所示,包括:眼壳81、旋转电机82、补光灯83、仿生眼84;仿生眼84由小型的机械结构组成,可以灵活地对前方视野检测,补光灯83可以在黑暗的环境下,为仿生眼84提供照明,旋转电机82辅助仿生眼84进行前后左右的视野检测。具体的,眼壳81包括可拆卸连接的前壳体和后壳体;眼壳81通过旋转电机82转动设置于一视觉支撑架9上;眼壳81的外壁上设置补光灯;眼壳81的内部设置
一仿生眼84。
34.仿生眼84,如图5、图6、图7所示,包括第一直线舵机841、第二直线舵机842、球面端头843,伸缩套杆844、眼球845。具体的,第一直线舵机841固定于后壳体上,第一直线舵机841的舵机推杆可沿左右方向移动且与第一滑块8411连接;第一滑块8411连接第二直线舵机842的外壳,第二直线舵机842的舵机推杆可沿上下方向移动且与第二滑块8421的后端连接;第二滑块8421的前端与一球面端头843球副连接;球面端头843的前端固定于一伸缩套杆844的后端,伸缩套杆844的前端固定于一眼球845,眼球845与眼壳81的前壳体球副连接,其中,眼球845是一种集成微型传感器8453、摄像头8454、信号传输模块8455的装置。
35.由此,球面端头球心8431随第二滑块8421可以移动,球面端头843可以围绕球面端头球心8431转动,眼球球心8451是固定的,眼球845可以围绕眼球球心8451转动。
36.第一直线舵机841与第二直线舵机842构成了一个丝杆十字装置,第一直线舵机841通过第一滑块8411带动第二直线舵机842整体左右移动,第二直线舵机842可以使第二滑块8421进行上下移动,所以第二滑块8421能够在空间内进行上下左右移动,第二滑块8421带动球面端头843移动,球面端头球心8431将会在固定的球心平面8432进行上下左右移动,并且球面端头843围绕球面端头球心8431转动,然后带动伸缩套杆844的位置和长度变化,引起眼球845在眼壳81的前壳体内围绕眼球球心8451转动,从而做出仿照动物眼的视觉方向8452变换,球面端头球心8431在球心平面8432上的每一个位置点都相对应仿生眼84的一个视觉方向8452。
37.主控制系统7和副控制系统14,主控制系统7设置于履带车1上,副控系统设置于四翼扑翼飞行器2的机架15上;机架15上还设置一摄像单元22,摄像单元22依次与副控制系统14、主控制系统7信号连接。
38.具体的,主控制系统7,如图13、图14所示,包括:pc分析模块24、主控制器71、电机驱动模块72、电流控制器73、遥控模块74。
39.其中, pc分析模块24和主控制器71,所述pc分析模块24用于接收并分析仿生眼84输出的环境信息和主控制器71的输出信息,之后输出指令信息至主控制器71,同时pc分析模块24与地面控制中心25进行信息传递;所述主控制器71用于接收pc分析模块24的输出指令信息并输出相应信号;所述主控制器71的第一输出端信号连接一电机驱动模块72的输入端,第二输出端信号连接一电流控制器73的输入端,第三输出端信号连接一遥控模块74的输入端,第四输出端与视觉机构8的第一直线舵机841和第二直线舵机842连接。
40.地面控制中心25,用于地面人员进行远程监测与控制。
41.电机驱动模块72,用于控制履带机的速度,电机驱动模块72的输出端与履带机上的履带车电机12信号连接。
42.电流控制器73用于控制电磁铁4的通电和断电,电流控制器73的输出端与电磁铁4的正负极连接,主控制器7发送调节信号给电流控制器73,电流控制器73根据信号调节电流大小,实现电磁铁4的通电和断电。
43.遥控模块74,用于改变翼臂153夹角和尾舵192的角度,遥控模块74的输出端与副控制系统14的输入端信号连接。
44.四翼扑翼飞行器2的副控制系统14包括:接收器141、电调模块142、电源模块143、电量数传模块144和无线图传模块145。
45.接收器141,用于接收遥控模块74的输出信息,接收器141的第一输出端与电调模块142的输入端信号连接,第二输出端与翼臂夹角调节机构18的第三直线舵机181信号连接,第三输出端与转向机构19的舵机信号连接。
46.电调模块142,用于对扑翼机构16的电机162调速,电调模块142的输出端信号连接电机162。
47.电源模块143和电量数传模块144,电源模块143用于获取四翼扑翼飞行器电池23的电量,之后通过电量数传模块144将电池量信号发送给pc分析模块24,pc分析模块24分析电量信息和行程信息,确定是否发送返航指令;其中,四翼扑翼飞行器电池23设置于机架15的上底座152;履带车1上设置履带车电池6,履带车电池6依次通过无线充电器5、无线充电接收器21、电源模块143给四翼扑翼飞行器电池23充电。
48.无线图传模块145,四翼扑翼飞行器2的摄像单元22通过无线图传模块145,将图像信息发送至pc分析模块24。
49.即仿生眼84中眼球845的微型传感器8453和摄像头8454探测识别环境、信号传输模块8455把环境信息传至pc分析模块24(图18所示),pc分析模块24对图像信息进行分析,根据信息发出相应的警报或发送相应指令信息给主控制器71,主控制器71在发送给指定模块,视觉机构8可以通过改变仿生眼84的视觉方向8452获取多方向信息;电机驱动模块72可以对履带车电机12进行速度控制,实现前进、后退、差速转向;电流控制器73控制电磁铁4通电断电;遥控模块74可以发送相应信息给接收器141,接收器141根据相应信息实现不同线路信号传递,电调模块142得信号,对电机162进行调速;第三直线舵机181得信号,实现翼臂153夹角改变;舵机得信号,实现尾舵192角度变化。
50.电源模块143可以获取四翼扑翼飞行器电池23电量,通过电量数传模块144发送给pc分析模块24,pc分析模块24分析电量信息和行程信息,确定是否发送返航指令;四翼扑翼飞行器2的摄像单元22通过无线图传模块145发送给pc分析模块24,履带车电池6供给履带车1上所有用电设备,可通过无线充电器5、无线充电接收器21、电源模块143给四翼扑翼飞行器电池23充电,其充电原理类似现有技术中的手机无线充电;四翼扑翼飞行器电池23供给四翼扑翼飞行器2上所有用电设备。
51.四翼扑翼飞行器2运动动作原理:(1)升降悬停:控制扑翼机构16上的电机162转速,改变扑翼频率,对升力进行调整,当升力大于重力,四翼扑翼飞行器2升起,当升力等于重力时,四翼扑翼飞行器2处于悬停状态,当升力小于重力时,四翼扑翼飞行器2下降。
52.(2)俯仰:控制翼臂夹角调节机构18中的第三直线舵机181的移动,带动夹角连杆182运动,使翼臂153夹角发生角度变化,使飞行器发生质心位置改变,以摄像单元22面对的方向是前,当翼臂153向后翻转,质心前移,在重力与升力的作用下,飞行器出现俯的动作,向前飞;同样,当翼臂153向前翻转,飞行器出现仰的动作,向后飞。(3)偏航: 控制转向机构19中的舵机191,使尾舵192发生角度变化,气流在尾舵192舵面两侧的流速就会不同,从而产生压力差作用在舵面上,进而产生转动力矩,实现偏航。
53.一种煤矿巷道空地巡检方法,如图14所示,包括以下步骤:
步骤1:将巷道信息输入至主控制系统,主控制系统进行路径规划,之后根据规划完成的路径驱动履带车上的履带车电机运行。
54.在履带车运行过程中,视觉机构通过改变仿生眼的位置以获取多方向信息,仿生眼输出图像信息至主控制系统,主控制系统对图像信息进行处理,并判断履带车前方是否有障碍物。
55.若是,则主控制系统发出障碍指令,并分析履带车是否能继续前行;若履带车无法继续前行,则执行步骤2。
56.步骤2:主控制系统连通副控制系统,副控制系统驱动扑翼机构的电机运行以实现四翼扑翼飞行器的飞行;同时,主控制系统控制履带车上的电磁铁断电,四翼扑翼飞行器脱离履带车;在飞行过程中,四翼扑翼飞行器上的摄像单元实时采集巷道图像信息,并将其传输至主控制系统;运行设定时间后,副控制系统获取四翼扑翼飞行器电池的电量,之后将电池量信号发送给主控制系统,主控制系统分析电量信息和行程信息,确定是否发送返航指令;如是,则执行步骤3。
57.步骤3:主控制系统发送返航指令至副控制系统,副控制系统控制转向机构的第三直线舵机运行,使得四翼扑翼飞行器返航。
58.步骤4:履带车上的无线充电器依次连通四翼扑翼飞行器上的无线充电接收器、副控制系统以对四翼扑翼飞行器电池充电。
59.上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1