一种结构对称的运动冗余两转一移并联机构
1.本发明涉及机器人技术领域,具体是一种结构对称的运动冗余两转一移并联机构。
背景技术:
2.与串联机构相比,并联机构在刚度、精度、速度、动力学性能上具有显著的优势,因此,在工业生产中得到了广泛的应用,如搬运码垛、运动模拟、手术医疗、零部件加工等领域。六自由度并联机构结构复杂、控制难度大,所以在很多工程实际难以得到应用,而少自由度并联机构,具有结构简单,设计、制造成本低廉等优点,尤其是动平台输出运动为两转一移的并联机构,在复杂零部件加工、产品分拣等领域应用前景广泛。
3.混联机床是一种重要的高端装备,是复杂零部件的加工装备。目前,市面上投入使用的混联机床多数是基于两转一移的并联机构,典型范例为德国的ecospeed装备。该装备由z3并联主轴头(3-prs)和两自由度移动框架组成。混联机床串联部分采用工业化标准零部件,核心实际是实现刀具调姿的并联机构。然而,目前提出的一些两转一移的并联机构,如z3主轴头、2upr-rpu并联机构、2pur-rpu 并联机构等没有运动冗余自由度,刀具工作空间和转动角度较小、灵活度不够,难以实现一些复杂零部件的高速和高精度加工、打磨。因此,迫切需要设计一种结构对称的运动冗余两转一移并联机构。
技术实现要素:
4.本发明所要解决的技术问题是克服背景技术存在的不足,提供一种结构对称的运动冗余两转一移并联机构,该并联机构应具有高速度、高刚度、高精度,转动角度大、灵活度高等优点。
5.本发明提供的技术方案是:
6.一种结构对称的运动冗余两转一移并联机构,包括机架、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;其特征在于:
7.所述侧边分支为第一分支,包括依次连接在机架与动平台之间的第一基座、第一虎克铰、第一移动副以及第一转动副;
8.第一转动副轴线平行于第一虎克铰与第一移动副连接的第二转动轴轴线,且垂直于第一移动副轴线;
9.所述中间分支为第二分支,包括依次连接在机架与动平台之间的第二移动副、第四转动副、第三移动副以及第二虎克铰;第二虎克铰与第三移动副连接的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线;或者,
10.所述中间分支为第三分支,包括依次连接在机架与动平台之间的第二基座、第六转动副、第四移动副、第五转动副、第一连杆、第三虎克铰;第三虎克铰与第五转动副连接的第一转动轴线平行于第五转动副轴线、第六转动副轴线,且垂直于第四移动副轴线。
11.两个第一分支中,两个第一转动副轴线平行,两个第一虎克铰与基座连接的第一转动轴轴线重合;
12.第二分支的第二虎克铰的第二转动轴线平行于第一分支的第一转动副轴线;
13.所述第三分支的第三虎克铰与动平台连接的第二转动轴线平行于第一分支的第一转动副轴线。
14.一种结构对称的运动冗余两转一移并联机构,包括机架、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;其特征在于:
15.所述侧边分支为第四分支,包括依次连接在机架与动平台之间的第四移动副、第四虎克铰、第五移动副、第七转动副;第四虎克铰与第四移动副连接的第一转动轴轴线平行于第四移动副轴线,第四虎克铰与第五移动副连接的第二转动轴轴线平行于第七转动副轴线且垂直于第五移动副轴线;或者,
16.所述侧边分支为第六分支,包括依次连接在机架与动平台之间的第四基座、第六虎克铰、第七移动副、第九转动副、第二连杆、第十转动副;第六虎克铰连接第七移动副的第二转动轴轴线平行于第九转动副轴线、第十转动副轴线,且垂直于第七移动副轴线;
17.所述中间分支为第五分支,包括依次连接在机架与动平台之间的第三基座、第八转动副、第六移动副、第五虎克铰;第五虎克铰连接第六移动副的第一转动轴轴线平行于第八转动副轴线,且垂直于第六移动副轴线。
18.两个第四分支中,两个第七转动副轴线相互平行,两个第四移动副轴线相互重合;第四虎克铰与第五移动副连接的第二转动轴轴线平行于第七转动副;
19.所述第五分支中第五虎克铰连接动平台的第二转动轴轴线,平行于第四分支中的第七转动副轴线;
20.两个第六分支中,两个第十转动副轴线平行,两个第六虎克铰连接第四基座的第一转动轴轴线重合;第五虎克铰连接动平台的第二转动轴线平行于第六分支的第十转动副。
21.一种结构对称的运动冗余两转一移并联机构,包括机架、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;其特征在于:
22.所述侧边分支为第四分支,包括依次连接在机架与动平台之间的第四移动副、第四虎克铰、第五移动副、第七转动副;第四虎克铰与第四移动副滑块连接的第一转动轴轴线平行于第四移动副轴线,第四虎克铰与第五移动副连接的第二转动轴轴线平行于第七转动副轴线且垂直于第五移动副轴线;
23.所述中间分支为第二分支,包括依次连接在机架与动平台之间的第二移动副、第四转动副、第三移动副以及第二虎克铰;第二虎克铰与第三移动副连接的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线;或者,
24.所述中间分支为第三分支,包括依次连接在机架与动平台之间的第二基座、第六转动副、第四移动副、第五转动副、第三连杆、第三虎克铰;
25.第三虎克铰与第三连杆连接的第一转动轴线平行于第五转动副轴线以及第六转动副轴线,且垂直于第四移动副轴线。
26.所述两个第四分支中,两个第七转动副轴线相互平行,两个第四移动副轴线相互重合。
27.一种结构对称的运动冗余两转一移并联机构,包括机架、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;其特征在于:
28.所述侧边分支采用第六分支,包括依次连接在机架与动平台之间的第四基座、第六虎克铰、第七移动副、第九转动副、第二连杆、第十转动副;第六虎克铰连接第七移动副的第二转动轴轴线平行于第九转动副轴线、第十转动副轴线,且垂直于第七移动副轴线;
29.所述中间分支采用第二分支,包括依次连接在机架与动平台之间的第二移动副、第四转动副、第三移动副以及第二虎克铰;第二虎克铰与第三移动副连接的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线;或者,
30.所述中间分支采用第三分支,包括依次连接在机架与动平台之间的第二基座、第六转动副、第四移动副、第五转动副、第三连杆、第三虎克铰;
31.第三虎克铰与第三连杆连接的第一转动轴轴线平行于第五转动副轴线以及第六转动副轴线,且垂直于第四移动副轴线。
32.两个第六分支中,两个第十转动副轴线平行,两个第六虎克铰连接第四基座的第一转动轴轴线重合。
33.驱动副包括各分支上的移动副;移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选用伺服电机驱动。
34.本发明的有益效果是:
35.本发明提出的并联机构具备运动冗余特性,动平台输出运动仍为两转一移动,具有高速度、高精度,高刚度、转动角度大、灵活度高等优点,可用于复杂零部件的加工、打磨。
附图说明
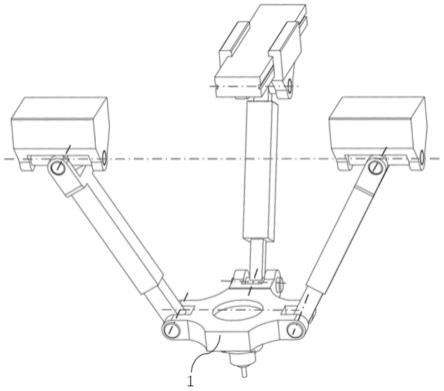
36.图1为本发明实施例一的立体结构示意图。
37.图2为本发明实施例二的立体结构示意图。
38.图3为本发明实施例三的立体结构示意图。
39.图4为本发明实施例四的立体结构示意图。
40.图5为本发明实施例五的立体结构示意图。
41.图6为本发明实施例六的立体结构示意图。
42.图7为本发明实施例七的立体结构示意图。
43.图8为本发明实施例八的立体结构示意图。
44.图9为第一分支的立体结构示意图。
45.图10为第二分支的立体结构示意图。
46.图11为第三分支的立体结构示意图。
47.图12为第四分支的立体结构示意图。
48.图13为第五分支的立体结构示意图。
49.图14为第六分支的立体结构示意图。
具体实施方式
50.以下结合说明书附图,对本发明作进一步说明,但本发明并不局限于以下实施例。
51.实施例一
52.如图1所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧。
53.侧边分支采用第一分支(参见图9),包括依次连接在机架与动平台1之间的第一基座11、第一虎克铰12、第一移动副、第一转动副15;
54.基座安装在机架上,第一虎克铰的第一转动轴与基座上的通孔配合形成第二转动副,第一虎克铰的第二转动轴与第一伸缩杆外杆13上的通孔配合形成第三转动副,第一伸缩杆内杆14与第一伸缩杆外杆配合形成第一移动副,第一转动副轴线平行于第三转动副轴线(即第一虎克铰的第二转动轴轴线),且垂直于第一移动副轴线。
55.中间分支采用第二分支(参见图10),包括依次连接在机架与动平台之间的第二移动副、第四转动副26、第三移动副以及第二虎克铰25;
56.第二移动副滑块22与固定在机架上的第二移动副导轨21配合形成第二移动副,第二伸缩杆外杆23与第二移动副滑块上的通孔配合形成第四转动副,第二伸缩杆内杆24与第二伸缩杆外杆配合形成第三移动副;
57.第二虎克铰与第二伸缩杆内杆连接(即与第三移动副连接)的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线。
58.两个第一分支中,两个第一转动副轴线平行,两个第一虎克铰与基座连接的第一转动轴轴线(第二转动副轴线)重合;
59.第二分支的第二虎克铰的第二转动轴轴线平行于第一分支的第一转动副轴线;
60.本实施例中,驱动副为各分支上的移动副,驱动方式可选用滚珠丝杠或者液压驱动(图中省略);从初始开始,通过控制四个驱动副的运动,可以使机构第二分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
61.实施例二
62.如图2所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
63.实施例二的结构与实施例一的部分结构类似(其中侧边分支的结构相同,采用第一分支),不同之处在于:
64.参见图11:中间分支采用第三分支,包括依次连接在机架与动平台1之间的第二基座31、第六转动副36、第四移动副、第五转动副37、第一连杆34、第三虎克铰35;
65.第二基座安装在机架上,第三伸缩杆外杆与基座上的通孔配合形成第六转动副,第三伸缩杆内杆33与第三伸缩杆外杆32配合形成第四移动副,第三伸缩杆内杆与第一连杆34通过销孔配合形成第五转动副,第三虎克铰与第一连杆连接的第一转动轴轴线平行于第五转动副轴线以及第六转动副轴线,且垂直于第四移动副轴线。
66.两个第一分支中,两个第一转动副轴线平行,两个第二转动副轴线重合;第三虎克铰与动平台连接的第二转动轴线平行于第一分支的第一转动副轴线;
67.本实施例中,驱动副为各分支上的移动副和第三分支上的第五转动副,移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选用伺服电机驱动(图中省略);从初始开始,通过控制四个驱动副的运动,可以使机构第三分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
68.实施例三
69.如图3所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
70.参见图12;侧边分支采用第四分支,包括依次连接在机架与动平台1之间的第四移动副、第四虎克铰43、第五移动副、第七转动副46;第四移动副滑块42与第四移动副导轨41配合形成第四移动副,第四伸缩杆内杆与第四伸缩杆外杆配合形成第五移动副,第四虎克铰与第四移动副滑块连接的第一转动轴轴线平行于第四移动副轴线,第四虎克铰与第四伸缩杆外杆连接(即与第五移动副连接)的第二转动轴轴线平行于第七转动副轴线且垂直于第五移动副轴线。
71.参见图13;中间分支采用第五分支,包括依次连接在机架与动平台之间的第三基座51、第八转动副55、第六移动副、第五虎克铰54;第五伸缩外杆52 与基座上的通孔配合形成第八转动副,第五伸缩杆内杆53与第五伸缩杆外杆配合形成第六移动副,第五虎克铰与第五伸缩杆内杆连接(即与第六移动副连接) 的第一转动轴轴线平行于第八转动副轴线,且垂直于第六移动副轴线。
72.两个第四分支中,两个第七转动副轴线相互平行,两个第四移动副轴线相互重合;第四虎克铰与第五移动副连接的第二转动轴轴线平行于第七转动副。
73.第五分支中第五虎克铰连接动平台的第二转动轴轴线,平行于第四分支中的第七转动副轴线。
74.本实施例中,驱动副为各分支上的移动副,移动副驱动方式可选用滚珠丝杠或者液压驱动(图中省略);从初始开始,通过控制五个驱动副的运动,可以使机构第四分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
75.实施例四
76.如图4所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
77.实施例四的结构与实施例三的部分结构类似(其中中间分支的结构相同,采用第五分支),不同之处在于:
78.参见图14;侧边分支采用第六分支,包括依次连接在机架与动平台1之间的第四基座61、第六虎克铰62、第七移动副、第九转动副67、第二连杆65、第十转动副66;第四基座安装在机架上,第六伸缩杆内杆64与第六伸缩杆外杆 63配合形成第七移动副,第六伸缩杆内杆与第二连杆上的通孔配合形成第九转动副,第六虎克铰连接第七移动副(图中显示是与第六伸缩杆外杆连接)的第二转动轴轴线平行于第九转动副轴线、第十转动副轴线,且垂直于第七移动副轴线。
79.两个第六分支中,两个第十转动副轴线平行,两个第六虎克铰连接第四基座的第
一转动轴轴线重合;第五虎克铰连接动平台的第二转动轴轴线平行于第六分支的第十转动副。
80.本实施例中,驱动副为各分支上的移动副和第六分支上的第九转动副,移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选用伺服电机驱动(图中省略);从初始开始,通过控制五个驱动副的运动,可以使机构第六分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
81.实施例五
82.如图5所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
83.实施例五的结构与实施例三的部分结构类似(其中侧边分支的结构相同,采用第四分支),不同之处在于:
84.参见图10,中间分支采用第二分支,包括依次连接在机架与动平台1之间的第二移动副、第四转动副、第三移动副以及第二虎克铰25;第二移动副滑块 22与第二移动副导轨21配合形成第二移动副,第二伸缩杆外杆与第二移动副滑块上的通孔配合形成第四转动副,第二伸缩杆内杆与第二伸缩杆外杆配合形成第三移动副;第二虎克铰与第三移动副连接(图中显示是与第二伸缩杆内杆24 连接)的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线。
85.两个侧边分支(第四分支)中,两个第七转动副轴线相互平行,两个第四移动副轴线相互重合。
86.本实施例中,驱动副为各分支上的移动副,驱动方式可选用滚珠丝杠或者液压驱动(图中省略);从初始开始,通过控制六个驱动副的运动,可以使机构第二分支、第四分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
87.实施例六
88.如图6所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
89.实施例六的结构与实施例三的部分结构类似(其中侧边分支的结构相同,采用第四分支);不同之处在于:
90.参见图11,中间分支采用第三分支,包括依次连接在机架与动平台1之间的第二基座31、第六转动副、第四移动副、第五转动副、第三连杆34、第三虎克铰35;
91.第二基座安装在机架上,第三伸缩杆外杆与基座上的通孔配合形成第六转动副,第三伸缩杆内杆33与第三伸缩杆外杆32配合形成第四移动副,第三伸缩杆内杆与连杆34通过销孔配合形成第五转动副,第三虎克铰与第三连杆连接的第一转动轴线平行于第五转动副轴线以及第六转动副轴线,且垂直于第四移动副轴线。
92.两个第四分支中,两个第七转动副轴线相互平行,两个第四移动副轴线相互重合;第四虎克铰与第四伸缩杆外杆连接(即与第五移动副连接)的第二转动轴轴线平行于第七转动副且垂直于第五移动副轴线。
93.第三分支中,第三虎克铰与第三连杆连接的第一转动轴线平行于第五转动副轴线
以及第六转动副轴线,且垂直于第四移动副轴线。
94.本实施例中,驱动副为各分支上的移动副和第五转动副,移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选用伺服电机驱动(图中省略);从初始开始,通过控制六个驱动副的运动,可以使机构第三、第四分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
95.实施例七
96.如图7所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
97.实施例七的结构与实施例四的部分结构类似(其中侧边分支的结构相同,采用第六分支),不同之处在于:
98.参见图10,中间分支采用第二分支,包括依次连接在机架与动平台1之间的第二移动副、第四转动副、第三移动副以及第二虎克铰25;第二移动副滑块 22与第二移动副导轨21配合形成第二移动副,第二伸缩杆外杆与第二移动副滑块上的通孔配合形成第四转动副,第二伸缩杆内杆与第二伸缩杆外杆配合形成第三移动副;第二虎克铰与第三移动副连接的第一转动轴轴线平行于第四转动副轴线且垂直于第三移动副轴线。
99.两个第六分支中,两个第十转动副轴线平行,两个第六虎克铰连接第四基座的第一转动轴轴线重合;第六虎克铰与第七移动副(图中显示是与第六伸缩杆外杆连接)连接的第二转动轴轴线平行于第九转动副轴线、第十转动副轴线,且垂直于第七移动副轴线;
100.本实施例中,驱动副为各分支上的移动副和第六分支上的第九转动副,移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选用伺服电机驱动(图中省略);从初始开始,通过控制六个驱动副的运动,可以使机构第二、第六分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
101.实施例八
102.如图8所示,一种结构对称的运动冗余两转一移并联机构,包括机架(图中省略)、动平台以及并联连接在机架与动平台之间的两个侧边分支和一个中间分支,两个侧边分支对称布置在中间分支的左右两侧;
103.实施例八的结构与实施例四的部分结构类似(其中侧边分支的结构相同),不同之处在于:
104.参见图11,中间分支采用第三分支,包括依次连接在机架与动平台1之间的第二基座31、第六转动副、第四移动副、第五转动副、第三连杆34、第三虎克铰35;
105.第二基座安装在机架上,第三伸缩杆外杆与基座上的通孔配合形成第六转动副,第三伸缩杆内杆33与第三伸缩杆外杆32配合形成第四移动副,第三伸缩杆内杆与连杆34通过销孔配合形成第五转动副,第三虎克铰与第三连杆连接的第一转动轴线平行于第五转动副轴线以及六转动副轴线,且垂直于第四移动副轴线。
106.两个侧边分支中,两个第十转动副轴线平行,两个第六虎克铰连接第四基座的第一轴线重合;第三虎克铰的第二转动轴线平行于第六分支的第十转动副。
107.本实施例中,驱动副为各分支上的移动副,第三分支上的第五转动副以及第六分支上的第九转动副,移动副驱动方式可选用滚珠丝杠或者液压驱动,转动副驱动方式可选
用伺服电机驱动(图中省略);从初始开始,通过控制六个驱动副的运动,可以使机构第三、第六分支产生运动冗余自由度,减少输入奇异位形,增大动平台的转动角度,提高机构的灵活度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1