一种构型对称的四足机器人轻型作业机械臂
1.本发明涉及移动机器人技术领域,尤其涉及一种构型对称的四足机器人轻型作业机械臂。
背景技术:
2.随着科学技术的快速发展,以及社会生活需求大大增加,机器人技术越来越成为研究的焦点。移动机器人技术是机器人领域的重要组成部分,并且应用广泛。移动机器人主要包含轮式、履带式、腿式等类别。如今在地外空间探索,军事领域,涉核行动,灾区救援等任务场景下,一般地形未知,地面崎岖不平,环境比较复杂,轮式和履带式移动机器人难以完成任务。仿生结构的腿式机器人,比如四足机器人对于跨越障碍,适应非结构化环境有着独特的优势。然而单独的腿式机器人系统仍然无法完成例如采集月壤,抓取物体,搜救等机器人复杂操作任务,需要结合多自由度机械臂来共同完成,实践中通常采用四足机器人搭载协作机械臂的形式。
3.目前,现有关于用在四足机器人的机械臂研究还不是很多,大多数是直接将协作机器人放置在四足机器人上。经检索现有专利文献,比如专利(公开号cn103921267a)公开了一种四足全方位移动机械臂,包括并联腿式结构四足平台和多自由度机械臂,所述机械臂为常见构型的协作机械臂,其第二、三、四关节通常有偏移量,是一个不对称的结构。由于所述平台是并联形式的腿部结构,所以承载能力大,刚度好,对机械臂构型几乎没有要求。但如果是串联型的四足机器人,传统构型的协作机械臂在运动中的偏载不容忽视,不利于四足机器人的行走以及机械臂作业的精准度。另外,一般的协作机械臂自重在10kg以上,对于小型四足机器人,其质心过高,质量过大的问题也会对四足驱动关节提出严苛的要求。专利(公开号cn213796500u)公开了一种腿臂协作机器人,该专利所述机械臂为对称结构,负载自重比也较高,但其构型在非工作时,无法提供一个姿态来降低整个系统的重心,不利于四足快速行进,且可能无法配合四足进行倒地起立动作。
4.所以,针对上述问题和要求,我们设计研发了一种构型对称的四足机器人轻型作业机械臂,可实现高的负载自重比,具有小偏载量,适应小型四足机器人,且可以通过折叠姿态降低重心。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何降低四足机器人轻型作业机械臂的负载自重比,如何通过折叠姿态降低系统的重心,如何配合四足机器人倒地后的起立动作等问题。
6.为实现以上目的,本发明提供了一种构型对称的四足机器人轻型作业机械臂,包括基座、第一关节模组、第二关节模组、大臂杆、第三关节模组、第四关节模组、小臂杆、第五关节模组、第六关节模组和末端法兰,所述基座的上端面与所述第一关节模组固定连接,所述第一关节模组与所述第二关节模组固定连接,所述第二关节模组与所述大臂杆的一端固
定连接,所述大臂杆的另一端与所述第三关节模组固定连接,所述第三关节模组与所述第四关节模组固定连接,所述第四关节模组与所述小臂杆的一端固定连接,所述小臂杆的另一端与所述第五关节模组固定连接,所述第五关节模组与所述第六关节模组固定连接,所述第六关节模组与所述末端法兰固定连接;所述基座通过螺纹与四足机器人背部相连接的法兰固定连接;所述四足机器人轻型作业机械臂的整体结构相对所述基座中心竖直面对称;所述四足机器人轻型作业机械臂能够分别绕着所述第一关节模组、所述第二关节模组、所述第三关节模组、所述第四关节模组、所述第五关节模组和所述第六关节模组转动,使其整体姿态可以是折叠、伸展或结合四足机器人使用需求的各种姿态;电源线、控制总线、末端机械手爪电源线和传感器通讯线等均可以在所述四足机器人轻型作业机械臂的内部布置。
7.进一步地,所述第一关节模组、所述第二关节模组、所述第三关节模组、所述第四关节模组、所述第五关节模组和所述第六关节模组中的每一个都包括无刷电机、谐波减速器、关节壳体、驱动电路和制动装置;所述无刷电机是动力来源;所述谐波减速器采用中空轴式设计以便于内部走线;所述关节壳体经优化设计,采用高强度低密度材料。
8.进一步地,所述第二关节模组的关节壳体呈t型,与所述大臂杆的一端螺纹连接;所述大臂杆具有中空结构,用于内部走线;所述大臂杆还包括大臂杆上盖,所述大臂杆上盖固定于所述大臂杆上;所述大臂杆的另一端与所述第三关节模组固定连接。
9.进一步地,所述第一关节模组还包括第一关节封盖,所述第一关节封盖置于所述基座的内部。
10.进一步地,还包括第二关节安装座、交叉滚子轴承、第二关节封盖和安装座封盖,所述第二关节安装座的左侧配合所述交叉滚子轴承,用来支撑所述第二关节模组,所述第二关节模组的输出端与所述第二关节安装座的右侧固定连接,形成简支梁对称结构;所述第二关节封盖安装在所述第二关节模组的左侧;所述安装座封盖安装在所述第二关节安装座的左侧;所述第二关节安装座左侧上盖安装在所述第二关节安装座的左侧外面;所述第二关节安装座与所述第一关节模组固定连接。
11.进一步地,所述第三关节模组还包括第三关节封盖、第三关节输出法兰和第三关节法兰走线封盖,所述第三关节模组的输出端与所述第三关节输出法兰相连接,所述第三关节输出法兰与所述第四关节模组相连接;所述第三关节封盖安装在所述第三关节模组的一侧,用于防尘防水;所述第三关节法兰走线封盖置于所述第三关节输出法兰的一侧,用于保护线路。
12.进一步地,所述第四关节模组还包括第四关节封盖,所述第四关节模组的关节壳体上部开槽,便于内部驱动和制动零部件的装配,所述第四关节封盖固定安装在所述开槽处。
13.进一步地,所述小臂杆包括左侧小臂杆和右侧小臂杆,方便走线与加工。
14.进一步地,所述第五关节模组还包括第五关节封盖、第五关节输出法兰和第五关节法兰走线封盖,所述第五关节模组的输出端与所述第五关节输出法兰相连接,所述第五关节输出法兰与所述第六关节模组相连接;所述第五关节封盖安装在所述第五关节模组的一侧,用于防尘防水;所述第五关节法兰走线封盖置于所述第五关节输出法兰的一侧,用于保护线路。
15.进一步地,所述第六关节模组还包括第六关节封盖和末端法兰,所述第六关节模组的输出端与所述末端法兰相连接,所述末端法兰通过螺纹接口与机械手爪或其他执行器相连接;所述第六关节封盖安装在所述第六关节模组的一侧,用于防尘防水。
16.与传统或常见四足机器人的机械臂相比,本发明具备以下有益效果:
17.(1)通过对关节、法兰结构进行设计,实现机械臂整体构型的对称,有效减弱机械臂运动中的偏载作用,提高四足机器人运行稳定性,在快速行进过程中尤为明显,该对称构型可使运动学方程更简洁,求解更方便。
18.(2)关节壳体等结构件采用高强度低密度航空铝质材料,经有限元优化设计,在保证强度的基础上,尽量减小质量,实现优于一般协作机械臂的质量指标,适合配合小型四足机器人的高精度作业。
19.(3)本发明的轻型作业机械臂可以配合四足机器人使用需求,完成特定的姿态和动作。折叠姿态有效降低整个系统重心,有利于四足稳定运行;撑地姿态辅助侧翻的四足机器人返回站立状态等。
20.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
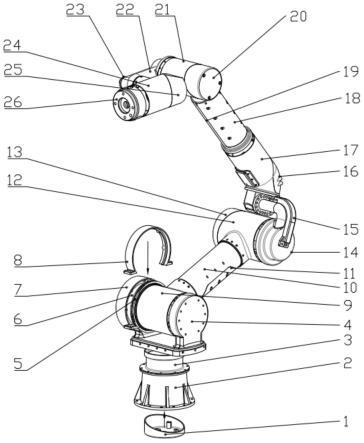
21.图1为本发明的一个较佳实施例的一种构型对称的四足机器人轻型作业机械臂的整体结构示意图;
22.图2为本发明的一个较佳实施例的一种构型对称的四足机器人轻型作业机械臂的初始状态结构示意图;
23.图3为本发明的一个较佳实施例的一种构型对称的四足机器人轻型作业机械臂的伸展姿态结构示意图;
24.图4为本发明的一个较佳实施例的一种构型对称的四足机器人轻型作业机械臂的折叠姿态结构示意图;
25.图5为本发明的一个较佳实施例的一种构型对称的四足机器人轻型作业机械臂的撑地姿态结构示意图。
26.其中,1-第一关节封盖,2-基座,3-第一关节模组,4-第二关节安装座,5-交叉滚子轴承,6-第二关节封盖,7-安装座封盖,8-第二关节安装座左侧上盖,9-第二关节模组,10-大臂杆,11-大臂杆上盖,12-第三关节模组,13-第三关节封盖,14-第三关节输出法兰,15-第三关节法兰走线封盖,16-第四关节封盖,17-第四关节模组,18-左侧小臂杆,19-右侧小臂杆,20-第五关节封盖,21-第五关节模组,22-第五关节输出法兰,23-第五关节法兰走线封盖,24-第六关节模组,25-第六关节封盖,26-末端法兰。
具体实施方式
27.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
28.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以
相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.如图1所示,本实例以该视角来介绍轻型作业机械臂的各部分结构。该轻型机械臂由基座2、第一关节模组3、第二关节安装座4、第二关节模组9、大臂杆10、大臂杆上盖11、第三关节模组12、第三关节输出法兰14、第四关节模组17、左侧小臂杆18、右侧小臂杆19、第五关节模组21、第五关节输出法兰22、第六关节模组24、末端法兰26组成。所述第一关节模组3、所述第二关节模组9、所述第三关节模组12、所述第四关节模组17、所述第五关节模组21和所述第六关节模组24中的每一个模组壳体内部均安装有无刷电机、谐波减速器、驱动电路和制动装置。其中,第二关节模组9和第三关节模组12使用同一规格无刷电机、谐波减速器、驱动电路和制动装置;第四关节模组17、第五关节模组21和第六关节模组24使用同一规格无刷电机、谐波减速器、驱动电路和制动装置;第一关节模组3使用不同上述两种规格的无刷电机、谐波减速器、驱动电路和制动装置。机械臂通过基座2的螺纹孔与四足机器人背部相连接的法兰固定连接。基座2与第一关节模组3的关节壳体通过螺钉连接,第一关节模组3的底部安装第一关节封盖1,留孔走线,第一关节模组3的谐波减速器输出端与关第二关节安装座4的底面相连接。第二关节安装座4左侧配合交叉滚子轴承5,用来支撑第二关节模组9的关节壳体,第二关节模组9的谐波减速器输出端与第二关节安装座4右侧固定连接,形成简支梁对称结构,第二关节模组9的关节壳体左侧安装第二关节封盖6,安装座封盖7安装在第二关节安装座4的左侧,第二关节安装座左侧上盖8安装在第二关节安装座4的左侧外面。第二关节模组9的关节壳体呈t型,与大臂杆10的一端螺纹连接,经参数设计,使大臂杆10对中。大臂杆10具有中空结构,内部走线,大臂杆上盖11固定于大臂杆10上,大臂杆10的另一端连接第三关节模组12的关节壳体,该壳体也呈t型。第三关节模组12的谐波减速器输出端连接第三关节输出法兰14,另一侧安装第三关节封盖13,防尘防水。第三关节输出法兰14经过结构设计,连接到第四关节模组17的关节壳体,使得第四关节模组17仍然对中,且内留有走线用的空腔,外加第三关节法兰走线封盖15保护线路。第四关节模组17的关节壳体上部开槽,便于内部驱动模组等零部件的安装,上加第四关节封盖16保护,第四关节模组17的谐波减速器输出端连接小臂杆,小臂杆分为左右两部分,分别为左侧小臂杆18和右侧小臂杆19,方便走线与加工,小臂杆的另一端连接第五关节模组21的t型关节壳体。第五关节模组21的谐波减速器输出端连接第五关节输出法兰22,另一侧安装第五关节封盖20。第五关节输出法兰22经过结构设计使第六关节模组24仍然对中,使第六关节模组24轴线与第五关节模组21轴线不存在偏置;第四关节模组17轴线、第五关节模组21轴线和第六关节模组24轴线能够相交于一点。第五关节输出法兰22具有中空结构,外加第五关节法兰走线封盖23保护线路。第六关节模组24的谐波减速器与末端法兰26相连,另一侧安装第六关节封盖25。末端法兰26通过螺纹接口与机械手爪或其他执行器连接。
31.如图2所示,此竖直姿态为本实例的初始状态,此状态方便调试时复位使用。
32.如图3所示,此伸展姿态为本实例最大臂展状态,由第二关节模组9的角度从初始
姿态逆时针旋转90
°
得到。
33.如图4所示,此折叠状态为本实例在运输或非工作时的状态,由第二关节模组9从初始姿态顺时针旋转90
°
,第三关节模组12从初始姿态逆时针旋转180
°
得到。所述折叠姿态便于携带运输,在四足机器人上可以降低整个系统重心高度,有益于运动平台的稳定运行。
34.如图5所示,此撑地姿态为本实例辅助四足机器人侧翻站立的状态,经动力学分析,由第二关节模组9从初始姿态顺时针旋转60
°
,第三关节模组12从初始姿态逆时针旋转180
°
,第五关节模组21从初始姿态顺时针旋转60
°
得到。所述撑地姿态可以在四足机器人侧翻倒地后,机械臂自主调整到该姿态,第二关节模组9与第三关节模组12提供倾覆力矩,辅助四足机器人翻转,进而恢复站立。
35.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1