基于模糊自适应全局滑模的机械臂轨迹跟踪控制方法
1.本发明属于非线性系统控制领域,涉及一种机械臂轨迹跟踪控制算法,具体涉及一种基于模糊自适应全局滑模的机械臂轨迹跟踪控制方法。
背景技术:
2.机械臂是一个高度非线性、难以精确建模的系统,加上机械臂在工作时还存在一些其他的外界未知扰动,这些都给机械臂的轨迹跟踪控制问题带来巨大的困难。
3.滑模控制被广泛地应用在非线性系统的控制当中。传统的固定参数滑模面结构一经确定,系统在滑模面上的收敛过程为在固定平面上的运动,系统难以保证误差在平面的不同位置、区域都具备较快的收敛速度。
4.由于考虑到机械臂工作时的模型不确定性和外界干扰这些不确定性,对系统的鲁棒性提高了要求。
技术实现要素:
5.本发明的目的是提供一种基于模糊自适应全局滑模的机械臂轨迹跟踪控制方法,该方法采用机械臂的拉格朗日动力学模型,考虑机械臂的模型参数不确定性和外部环境干扰,设计一种基于模糊控制的时变参数动态滑模面和积分形式的全局滑模面,进一步设计得出控制律和自适应律,实现机械臂的轨迹跟踪控制。
6.本发明的目的是通过以下技术方案实现的:
7.一种基于模糊自适应全局滑模的机械臂轨迹跟踪控制方法,包括如下步骤:
8.步骤1、针对考虑模型不确定性、外界干扰的刚性机械臂的轨迹跟踪控制问题,设计基于模糊控制的实变参数滑模面结构:
9.s(t)=f(x(t),k(t));
10.k(t)=α(t)k;
11.其中,α(t)为时变系数,k为固定参数;
12.步骤2、针对步骤1中的时变参数滑模面结构,结合机械臂数学模型,设计滑模变量s,其参数通过模糊控制器的输出自适应调节,具体形式如下所示:
[0013][0014]
k1(t)=α1(t)k1;
[0015]
k2(t)=α2(t)k2;
[0016]
其中,k1,k2>0,λ2>1,0<α1(t),α2(t)<1;qe为机械臂的角位置误差;
[0017]
步骤3、设计模糊控制器的输入为误差qe,输出为时变系数α1(t)、α2(t),并设计相应的隶属度函数和模糊逻辑,其中:
[0018]
模糊逻辑为:当输入qe较大时,输出α2(t)为较大值、α1(t)为较小值;当输入qe大小适中时,输出α2(t)为适中值、α1(t)为适中值;当输入qe较小时,输出α2(t)为较小值、α1(t)为
较大值;
[0019]
步骤4、针对步骤2中设计的滑模变量,设计积分形式的全局滑模变量σ:
[0020][0021]
其中,k3>0,γ<1;
[0022]
步骤5、针对步骤2、步骤3和步骤4中设计的滑模变量、模糊控制器、全局滑模变量,设计基于模糊自适应滑模的机械臂轨迹跟踪控制律和自适应律,实现轨迹跟踪控制,其中:
[0023]
基于模糊自适应滑模的机械臂轨迹跟踪控制律为:
[0024][0025][0026][0027][0028]
其中,k>0,qd为机械臂的期望轨迹,为自适应律。
[0029]
自适应律为:
[0030][0031][0032][0033][0034]
其中,λ0,λ1,λ2>0,q为机械臂的角位置。
[0035]
相比于现有技术,本发明具有如下优点:
[0036]
本发明针对机械臂的轨迹跟踪问题设计了一种基于模糊自适应全局滑模的控制器,其控制对象的模型为一考虑模型不确定性和外界干扰的刚性机械臂,采用自适应滑模控制的方法设计控制律和自适应律,实现轨迹跟踪控制。同时引入模糊控制,根据系统的状态变量距离平衡点的距离实时调节滑模参数,使得系统在滑模面上的整个收敛过程都具备较快的收敛速度,并减少力矩浪费,全局滑模提高了系统的鲁棒性,使得系统能够能够有效的克服模型不确定性和外界干扰,同时不需要知道不确定性项的上界具体值,有利于机械臂系统在不同的老化程度下和不同环境下正常工作。
附图说明
[0037]
图1为基于模糊自适应滑模的机械臂轨迹跟踪控制系统框图;
[0038]
图2为模糊控制输入的隶属度函数;
[0039]
图3为模糊控制输出的隶属度函数;
[0040]
图4为d=0.1时角位置误差收敛曲线;
[0041]
图5为d=0.1时角速度误差收敛曲线;
[0042]
图6为d=0.1时力矩曲线;
[0043]
图7为d=0.1、d=0.2时角位置误差收敛曲线;
[0044]
图8为d=0.3、d=0.4时角位置误差收敛曲线;
[0045]
图9为d=0.1、d=0.2时角速度误差收敛曲线;
[0046]
图10为d=0.3、d=0.4时角速度误差收敛曲线;
[0047]
图11为固定扰动加正弦扰动时的角位置、角速度误差收敛曲线;
[0048]
图12为固定扰动加白噪声时的角位置、角速度误差收敛曲线;
[0049]
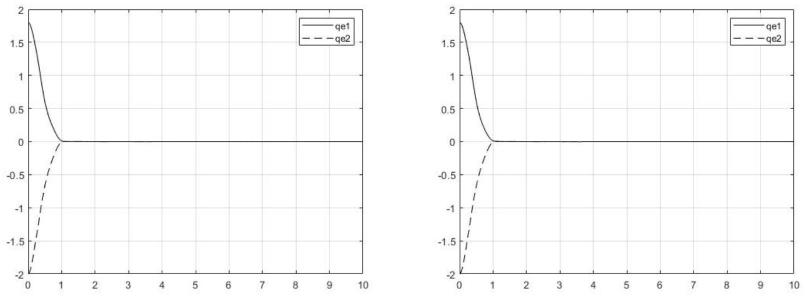
图13为固定参数滑模结构的角位置、角速度误差收敛曲线;
[0050]
图14为时变参数滑模结构的角位置、角速度误差收敛曲线;
[0051]
图15为固定参数(左)和时变参数(右)滑模结构的力矩曲线。
具体实施方式
[0052]
下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
[0053]
本发明提供了一种基于模糊自适应全局滑模的机械臂轨迹跟踪控制方法,所述方法包括如下步骤:
[0054]
步骤1、针对考虑模型不确定性、外界干扰的刚性机械臂的轨迹跟踪控制问题,设计基于模糊控制的实变参数滑模面结构。
[0055]
在滑模控制中,滑模面的结构将决定系统在滑模面上的运动。对于固定参数滑模面结构的设计,可以写成如下形式:
[0056]
s(t)=f(x(t),k);
[0057]
其中,s(t)为滑模变量,x(t)为系统的状态,k为滑模面的参数。
[0058]
当系统状态收敛至滑模面s(t)=0=0上时,系统的动力学方程为:
[0059]
f(x(t),k)=0。
[0060]
将在固定的滑模面上收敛至平衡点。传统的固定参数滑模面结构,往往只能保证系统状态在某些范围内具备较快的收敛速度,从而限制了在滑模面上的整体收敛过程。
[0061]
将滑模面的固定参数时变化,滑模面的结构变为:
[0062]
s(t)=f(x(t),k(t));
[0063]
k(t)=α(t)k;
[0064]
其中,α(t)为时变系数,k为固定参数。滑模面结构随着系统的收敛而不断改变,从而起到加快收敛速度的作用。时变系数α(t)由模糊控制器输出。
[0065]
步骤2、针对步骤1中的时变参数滑模面结构,结合机械臂数学模型,设计具体的滑模面。
[0066]
设计滑模变量s,其形式如下所示:
[0067][0068]
k1(t)=α1(t)k1;
[0069]
k2(t)=α2(t)k2;
[0070]
其中,k1,k2>0,λ2>1,0<α1(t),α2(t)<1为模糊控制器的输出;qe为机
械臂的角位置误差。
[0071]
当系统处于滑模面s=0上,系统状态动力学方程如下式所示:
[0072][0073]
当系统误差qe较大时,对误差的收敛起到主导作用;当系统误差qe接近于0时,对误差的收敛起到主导作用。
[0074]
步骤3、针对步骤2中的时变参数,设计模糊控制器。
[0075]
在步骤2中,系统在滑模面上的收敛主导项受误差qe的影响。设计模糊控制器的输入为误差qe,输出为时变系数α1(t)、α2(t),并设计相应的隶属度函数,具体表达式如下:
[0076]
输入的隶属度函数:
[0077][0078]
输出的隶属度函数:
[0079][0080]
其中,i=1,2。
[0081]
模糊控制器的模糊逻辑为:
[0082]
当输入qe较大时,输出α2(t)为较大值、α1(t)为较小值;当输入qe大小适中时,输出α2(t)为适中值、α1(t)为适中值;当输入qe较小时,输出α2(t)为较小值、α1(t)为较大值。
[0083]
上述模糊控制器起到进一步加强主导项、减弱非主导项的作用,使得系统的收敛速度加快。同时由于各参数影响控制力矩的输出,也能减小力矩的浪费。
[0084]
步骤4、针对步骤2中设计的时变参数滑模面结构,设计全局滑模变量。
[0085]
在滑模控制系统中,系统收敛过程分为两个阶段,一个是到达段,即系统从初始位置到达滑模面上的阶段;第二个是滑动阶段,即系统处于滑模面上,收敛只受滑模面本身限制,沿着滑模面收敛至平衡点。全局滑模使得系统从一开始就在滑模面上,使原来的到达段也具备滑模控制所具有的强鲁棒性。
[0086]
设计全局滑模变量:
[0087][0088]
其中,k3>0,γ<1。
[0089]
同时,由于引进了积分器,滑模变量σ的变化比变量s更加平缓,将其作为控制量时能够减小控制力矩的抖振。
[0090]
步骤5、针对步骤2、步骤3和步骤4中设计的滑模变量、模糊控制器,设计机械臂轨迹跟踪控制律和自适应律。
[0091]
设计基于模糊自适应滑模的机械臂轨迹跟踪控制律为:
[0092][0093][0094][0095][0096]
其中,k>0,qd为机械臂的期望轨迹,为自适应律。
[0097]
设计自适应律为:
[0098][0099][0100][0101][0102]
其中,λ0,λ1,λ2>0,q为机械臂的角位置。
[0103]
实施例:
[0104]
对于一个一般的刚性机械臂,其拉格朗日动力学模型可以由以下二阶非线性微分方程表示:
[0105][0106]
其中,分别表示关节的角位置,角速度和角加速度;m(q)∈rn×n,是一个对称正定矩阵,表示惯性;表示离心力和科里奥利力转矩;g(q)∈rn,表示重力转矩;τ∈rn,表示控制转矩。
[0107]
将上述方程写成误差的形式:
[0108][0109]
其中,qd为期望关节的角位置,qe=q-qd为关节角位置误差。
[0110]
考虑机械臂的模型不确定性,在方程中表示为参数的不确定。考虑机械臂的外加扰动和摩擦力矩,设为τd和动力学方程变为:
[0111][0112]
其中,m0(q)、g0(q)为已知的名义部分,δm(q)、δg(q)为模型不确定性,τd和分别为固定扰动和时变扰动。
[0113]
进一步化简为:
[0114][0115]
其中,ρ0、ρ1、ρ2为大于0的常数,||
·
||表示向量的二范数,满足假设:
[0116]
考虑摩擦转矩使得下式成立:
[0117][0118]
其中,γ0、γ1、γ2为大于0的常数,满足假设:
[0119]
最后写成误差的形式为:
[0120][0121]
设计滑模变量s,其形式如下所示:
[0122][0123]
其中,k1,k2>0,λ2>1,0<α1(t),α2(t)<1为模糊控制器的输出;qe为机械臂的角位置误差。
[0124]
当系统处于滑模面s=0上,系统状态动力学方程如下式所示:
[0125][0126]
当系统误差qe较大时,对误差的收敛起到主导作用;当系统误差qe接近于0时,对误差的收敛起到主导作用。
[0127]
根据上述主导控制的逻辑思路,将系统状态误差的二范数||qe||作为模糊控制的输入,以此来衡量系统和平衡点的距离。模糊控制器设计如下:
[0128]
模糊控制输入||qe||的隶属度函数如图2所示,模糊控制输出α0(t),α1(t),α2(t)的隶属度函数如图3所示,模糊规则如表1所示,去模糊化采用重心法。
[0129]
表1模糊规则
[0130]
||qe||α1(t)α2(t)
sbsmmmbsb
[0131]
注:s、b、m是模糊集,代表小、大、中。
[0132]
通过模糊自适应控制,使得滑模面参数在系统的收敛过程中,根据距离平衡点的位置自适应调节。当系统离平衡点较远时,||qe||较大,项对误差收敛起到主导作用,此时模糊自适应控制器输出系数α2(t)较大,α1(t)较小,以此增强该项的主导作用。同理,当系统离平衡点距离适中时,输出α2(t)为适中值、α1(t)为适中值,和共同作为主导项;当系统离平衡点距离较小时,输出α2(t)为较小值、α1(t)为较大值,增强项的主导作用。通过模糊控制器增强不同阶段的主导项作用,以此提高收敛速度。由于这些参数直接影响控制力矩的大小,这种自适应控制的引入也可以减少控制力矩的浪费。
[0133]
为了进一步提高系统的鲁棒性、减小控制力矩的抖振,设计全局滑模变量:
[0134][0135]
其中,k3>0,γ<1。
[0136]
由于积分器的引入,系统从一开始就处于滑模面σ=0上,通过设计控制律,使得系统一直处于σ=0上(附近),从而使滑模变量s按照下式规律运动:
[0137][0138]
其中,||ε||有限且非常小。
[0139]
根据上述方法,可设计得到的控制律:
[0140][0141]
其中,k>0,为自适应律。
[0142]
设计自适应律为:
[0143][0144]
其中,λ0,λ1,λ2>0,|
·
|为向量的一范数。
[0145]
下面对所设计的控制律和自适应律进行稳定性分析:
[0146]
由式(7)可得:
[0147]
[0148][0149]
将式(11)、(12)带入式(6)中可得变量s的动力学方程为:
[0150][0151]
由式(9)可得:
[0152][0153]
将式(16)带入式(15)中可得变量σ的动力学方程为:
[0154][0155]
考虑lyapunov函数v,其形式如下:
[0156][0157]
对其求导可得:
[0158][0159]
将(17)带入(19)中可得:
[0160][0161]
由机械臂的性质中为反对称矩阵,进一步可得:
[0162][0163]
综上所述,所设计的基于模糊自适应全局滑模的控制律能够使得系统一直处于滑模面σ=0上,从而系统状态误差在滑模面上运动收敛至平衡点。
[0164]
选取二自由度刚性机械臂仿真,数学模型如式(21)所示:
[0165][0166]
其中,各矩阵的形式为:其中,各矩阵的形式为:
[0167]
系数矩阵中各参数表达式如下:
[0168][0169]
考虑d倍的模型不确定性参数,即:m1=(1+d)m
10
,m2=(1+d)m
20
,l1=(1+d)l
10
,l2=(1+d)l
20
,j1=(1+d)j
10
,j2=(1+d)j
20
。
[0170]
机械臂各物理量参数如下:
[0171]
质量:m
10
=0.5kg,m
20
=1.5kg。
[0172]
长度:l
10
=1m,l
20
=0.8m。
[0173]
转动惯量:j
10
=j
20
=5kg
·
m2。
[0174]
重力加速度:g=9.8n/kg。
[0175]
设置期望轨迹:
[0176]
设置式(4)中的不确定性干扰为:τd=5,
[0177]
设置式(7)、(9)中滑模变量的参数为:k1=5,k2=2,k3=10,λ1=0.6,λ2=2,γ=0.7。
[0178]
设置式(11)、(12)所示的控制律和自适应律参数为:k=5,λ0=λ1=λ2=1,并对控制力矩的最大值限制为150n
·
m。
[0179]
d取值0.1的仿真结果如图4~6所示。从图4~6中可以看出,所设计的控制器能够使系统在较短时间内收敛至平衡点,同时控制力矩的大小在合适的范围内。为了进一步说明本发明的优越性,进行了以下对比仿真实验。
[0180]
不同程度不确定性下的收敛曲线如图7~10所示,从图7~10中可以看出,随着不确定性程度增大,角位置、角速度误差的收敛曲线并无明显变化,收敛速度基本不变,验证了系统对模型不确定性的强鲁棒性。
[0181]
重新将模型不确定性系数设为0.1,对不同类型环境干扰进行仿真实验,结果如下:
[0182]
外界扰动设置为以下形式:τd=5,为固定扰动和正弦扰动的叠加,收敛曲线如图11所示。
[0183]
外界扰动设置为以下形式:τd=5,为一均值为0,方差为1的高斯白噪声信号,
为固定扰动加白噪声的叠加,收敛曲线如图12所示。从图12中可以看出,系统在不同环境干扰下,仿真曲线没有明显变化,收敛速度基本不变,验证了系统对环境干扰的强鲁棒性。
[0184]
重新将外界扰动设置为固定扰动和正弦扰动叠加的形式,并将模糊控制器的输出设置为:α1=α2=0.55,此时系统将退化为固定参数滑模结构,对比其与时变参数滑模结构下的收敛过程,结果如图13~14所示。
[0185]
收敛速度的快慢直接受控制力矩的大小影响,在考虑收敛速度的同时,对比力矩曲线如图15所示。从图15中的收敛曲线可以直接看出,时变参数滑模结构下的收敛速度较固定参数滑模结构快,力矩的大小无法直接从曲线当中得出。定义收敛过程t时间内的平均力矩指标为:
[0186][0187]
其中,i(τ)∈rn,τ∈[τ
1 τ2ꢀ…ꢀ
τn]
t
∈rn。
[0188]
固定参数滑模结构下各关节的平均力矩指标为:时变参数滑模结构下各关节的平均力矩指标为:可以得出时变参数滑模结构下,收敛过程中各关节的平均力矩均小于固定参数滑模结构,验证了基于模糊控制的时变参数滑模结构的优越性,即加快收敛速度、减少力矩浪费。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1