一种工业机器人
1.本发明涉及机器人领域,更具体的说是一种工业机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,但是现有的机器人不能够可靠的夹紧采气树,完成采气树的平稳安置和调节。
3.公开号为106142134的发明公开了一种新型的工业机器人,包括底座、一级旋转控制轴、旋转盘、连接转动轴和角度调节轴,所述底座的下端安置有固定吸盘,所述连接轴与连接主轴之间通过一级旋转控制轴进行连接,所述一级旋转控制轴的右端安置有凸起连接端,所述连接主轴的上端通过二级旋转控制轴与连接轴相连接,所述旋转盘的右端与电动机体相连接,所述连接转动轴的前端安置有连接抓手,且连接抓手的内部镶嵌有角度调节轴,所述角度调节轴的前端安置有抓手。但是该发明不能够平稳的安置和调节采气树。
技术实现要素:
4.本发明的目的是提供一种工业机器人,具有能够平稳的安置和调节采气树的优点。
5.本发明的目的通过以下技术方案来实现:
6.一种工业机器人,包括安装架,以及设置在安装架上的弧槽,以及滑动在弧槽内的移动架,以及固接在移动架上的限位框,以及设置在限位框内夹紧采气树的夹紧部,移动架能够在弧槽内绕弧槽的轴线进行转动。
7.进一步的,所述工业机器人还包括固接在移动架上的两个弧形齿条,以及转动在安装架延伸板上的两个驱动轮,两个驱动轮分别和对应的弧形齿条啮合传动。
8.进一步的,所述工业机器人还包括固接在弧槽内对移动架进行限位的限位块。
附图说明
9.下面结合附图和具体实施方法对本发明做进一步详细的说明。
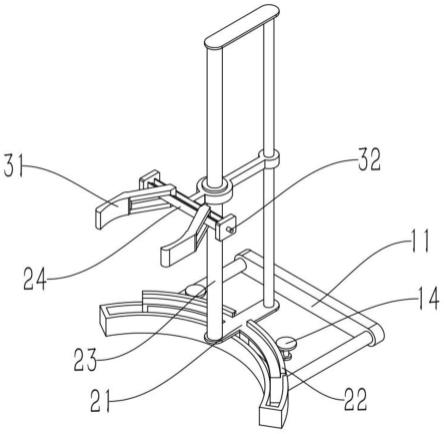
10.图1是夹紧采气树进行转动的结构示意图;
11.图2是安装架的结构示意图;
12.图3是驱动移动架转动的结构示意图;
13.图4是夹紧部的结构示意图;
14.图5是夹紧采气树的分管的结构示意图;
15.图6是夹紧一行采气树分管的结构示意图;
16.图7是承托部的结构示意图;
17.图8是承托爪的结构示意图;
18.图9是弧形架的结构示意图;
19.图10是夹紧采气树平稳运输和安放的结构示意图。
具体实施方式
20.参考图1,详细说明快速安装采气树时进行采气树的转动进行微调,实现采气树的快速安装的实施过程:
21.一种工业机器人包括安装架11,安装架11连接在外设的行走机构上,通过外设的行走设备进行工业机器人的移动,安装架11上设置有弧槽12,弧槽12内滑动连接有移动架21,移动架21上固定连接有限位框24,限位框24内设置有夹紧部,夹紧部用来夹紧采气树的中部轴线竖直的管道,现有技术中,采气树均通过人工安装,安装方式复杂,再配合外设的行走机构能够实现采气树的运输,移动架21能够在弧槽12内绕弧槽12的轴线进行转动,移动架21进行转动时带动限位框24进行转动,限位框24带动夹紧部进行转动,进而实现带动采气树进行转动,夹紧部中部轴线竖直的管道的轴线与弧槽12的轴线重合,进而能够实现采气树绕自身轴线进行转动实现采气树转动调节,方便实现采气树的螺栓孔的对准,进而实现采气树的快速安装。
22.结合上述实施例,还可以实现以下功能;
23.参考图1、2和3,详细说明驱动移动架转动,调节采气树摆放位置的实施过程:
24.移动架21上固定连接有两个弧形齿条22,安装架11延伸板上转动连接有两个驱动轮14,两个驱动轮14分别固定连接在两个减速电机ⅰ的输出轴上,两个减速电机ⅰ均固定连接在安装架11延伸板上,两个驱动轮14分别和对应的弧形齿条22啮合传动,启动两个减速电机ⅰ,两个减速电机ⅰ的输出轴带动两个驱动轮14进行转动,两个驱动轮14啮合驱动两个弧形齿条22进行转动,两个弧形齿条22带动移动架21进行转动,进而实现采气树绕自身轴线进行转动,实现采气树的轴线上的调节。
25.结合上述实施例,还可以实现以下功能;
26.参考图2,详细说明移动架能够稳定转动的实施过程:
27.弧槽12内固定连接有限位块13,限位块13将移动架21压在弧槽12内,防止移动架21在受力进行转动的过程中出现倾斜,进而导致在安装采气树时出现干涉,造成采气树的损坏。
28.结合上述实施例,还可以实现以下功能;
29.参考图1和4,详细说明夹紧部的详细结构夹紧采气树的实施过程:
30.限位框24内设置有矩形槽口,该矩形槽口内滑动连接有两个中间夹爪31,两个中间夹爪31对称设置,限位框24上转动连接有中间丝杆32,中间丝杆32固定连接在减速电机ⅱ的输出轴上,减速电机ⅱ固定连接在限位框24上,两个中间夹爪31均和中间丝杆32通过螺纹传动,启动减速电机ⅱ时,减速电机ⅱ带动中间丝杆32转动,中间丝杆32通过螺纹驱动两个中间夹爪31同步在限位框24内的矩形槽口内进行滑动,中间丝杆32两端的螺纹旋向相反,从而实现两个中间夹爪31同步向中间滑动对采气树进行夹紧,或者同步向两侧分开,实现对夹紧的采气树的释放,两个中间夹爪31夹紧采气树的位置设置有防滑橡胶垫,防止夹紧的采气树出现掉漆的情况,造成采气树掉漆后的锈蚀,出现采气树的损坏。
31.结合上述实施例,还可以实现以下功能;
32.参考图5,详细说明承托采气树上的分管,保证采气树平稳准确的安置进行采气树
的安装的实施过程:
33.移动架21上转动连接有调节丝杆23,移动架21上滑动连接有两个弧形架41,每个弧形架41上均固定连接有两个导向杆42,多个导向杆42上均设置有夹紧采气树的承托部,调节丝杆23固定连接在减速电机ⅲ的输出轴上,减速电机ⅲ固定连接在移动架21上,启动减速电机ⅲ,减速电机ⅲ带动调节丝杆23进行转动,调节丝杆23通过螺纹驱动两个弧形架41在移动架21上进行升降,两个弧形架41的设置,便于在安装采气树时出现问题需要人工调节时,避开宽阔的空间,便于工人拥有足够的空间进行操作,两个弧形架41升降时带动多个承托部进行升降,通过多个承托部对采气树的分管进行夹紧和承托,进而实现对采气树的整体的夹紧,实现采气树稳定可靠的运输,进而实现对采气树的精准定位和安装。
34.结合上述实施例,还可以实现以下功能;
35.参考图6、7、8和10,详细说明多个承托部夹紧多个采气树的分管进行采气树的承托的实施过程:
36.多个承托部均包括转动在多个导向杆42上的多个承托丝杆61,多个承托丝杆61上均通过螺纹连接有承托块51,多个承托块51分别滑动连接在对应的导向杆42上,多个承托块51上均固定连接有承托爪52,多个承托丝杆61均固定连接在减速电机ⅳ的输出轴上,多个减速电机ⅳ均固定连接在对应的导向杆42上,启动多个减速电机ⅳ,多个减速电机ⅳ带动多个承托丝杆61进行转动,多个承托丝杆61通过螺纹驱动多个承托块51在对应的导向杆42上进行滑动,多个承托块51带动多个承托爪52滑动对采气树的分管继续宁夹紧和承托,实现采气树的平稳夹紧。
37.结合上述实施例,还可以实现以下功能;
38.参考图7,详细说明夹紧采气树的分管的实施过程:
39.每个导向杆42上设置的两个承托爪52同步反向滑动,多个承托丝杆61两侧的螺纹的旋向相反,当多个承托丝杆61转动时通过螺纹驱动对应的承托块51同步反向滑动,进而实现对应的承托爪52对采气树分管的夹紧和松脱,实现采气树的平稳运输和放置。
40.结合上述实施例,还可以实现以下功能;
41.参考图8,详细说明牢固抓紧采气树的实施过程:
42.多个承托爪52上均设置有防滑点,增加多个承托爪52与采气树分管的摩擦力,进而实现稳固的抓紧采气树,防止采气树出现摔倒。
43.结合上述实施例,还可以实现以下功能;
44.参考图9,详细说明防止承托的采气树出现掉落的实施过程:
45.多个导向杆42的下端均设置有销孔,通过向夹紧后的下端的承托爪52下端对应的销控内添加销轴,防止由于夹紧力不足出现采气树的掉落,通过多个销轴对多个承托块51的限位,防止采气树掉落,造成采气树的损坏或者砸伤工人,影响工人的人身安全。
46.结合上述实施例,还可以实现以下功能;
47.参考图5和10,详细说明夹紧两行采气树分管的实施过程:
48.两个弧形架41同步反向滑动,进而能够实现对不同间距的两行采气树分管进行夹紧,进而实现采气树的可靠平稳的夹紧。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1