一种基于路径检验修正的轮式巡检机器人的制作方法
1.本发明涉及巡检机器人技术领域,更具体地说,本发明涉及一种基于路径检验修正的轮式巡检机器人。
背景技术:
2.随着经济的发展人工智能逐渐出现在人们的视线,智慧化园区、智能化社区的建设为人们带了一系列的便利,人工智能将成为其新的竞争热点,巡检机器人更是其中的重中之重,传统巡检安防工作走向以人工智能技术为依托的“智能巡检”及“立体巡检”,用巡检机器人来代替其安保人员工作。
3.目前,现有技术中的轮式巡检机器人具有自主行走、自主充电、自主避障和语音交互等功能,搭载双光谱测温云台摄像机,具有高清摄影、急速抓拍、夜视拍照、精确测温和异常报警等实用功能,可满足多种复杂环境下的巡检工作,但是在实际使用时难以快速的自动进行路径修正,而且当路面平整度较低或者天气较为恶劣时,容易产生歪斜甚至倾倒的情况,影响巡检机器人的正常使用,而且现有技术中当巡检监控设备升高时,不能根据升高程度来调节支撑面积,使得支撑不够稳定,因此,研究一种新的基于路径检验修正的轮式巡检机器人来解决上述问题具有重要意义。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明提供了一种基于路径检验修正的轮式巡检机器人,本发明所要解决的技术问题是:现有技术中的轮式巡检机器人在实际使用时难以快速的自动进行路径修正,而且当路面平整度较低或者天气较为恶劣时,容易产生歪斜甚至倾倒的情况,影响巡检机器人的正常使用,而且现有技术中当巡检监控设备升高时,不能根据升高程度来调节支撑面积,使得支撑不够稳定的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于路径检验修正的轮式巡检机器人,包括控制底座,所述控制底座的上表面与升降柱的底端固定连接,所述升降柱的顶端与摄像机的下表面固定连接,所述摄像机的左侧面与支撑结构的两端固定连接,所述支撑结构设置在控制底座的下表面,所述控制底座的下表面与升降机构的顶端固定连接。
6.所述控制底座的内部设置有两个连接轴,两个所述连接轴的外表面均固定连接有两个移动轮,两个所述连接轴的内部均设置有两个长条杆,两个所述长条杆的两端均固定连接有两个辅助轮,两个所述长条杆的外表面均套接有两个轴承,前方的两个所述轴承和后方的两个轴承的外表面分别与两个支撑板的内部固定连接,两个所述支撑板的相对面设置有延伸装置,所述延伸装置设置在控制底座的下表面。
7.所述支撑结构包括两个连接条,两个所述连接条外表面的一端与摄像机的左侧面固定连接,两个所述连接条的下表面分别与两个连接绳的一端固定连接,两个所述连接绳的另一端分别与两个连接块的外表面一侧固定连接,两个所述连接块的相背面分别与两个燕尾滑板的相对面固定连接,两个所述燕尾滑板的一侧与弹簧的一端固定连接,两个所述
燕尾滑板的下表面与同一个连接板的上表面固定连接,所述连接板的下表面与两个滚轮的上表面固定连接。
8.所述延伸装置包括双轴电机,所述双轴电机的上表面与控制底座的下表面固定连接,所述双轴电机的两个输出轴分别与两个螺杆的相对面固定连接,两个所述螺杆的外表面均螺纹连接有螺母,两个所述螺母外表面的两侧均固定连接有连接杆,前方的两个所述连接杆和后方的两个连接杆分别与两个支撑板的相对面固定连接,所述控制底座包括巡检机器人控制系统,所述巡检机器人控制系统的输出端与偏移检测模块的输入端电连接,所述偏移检测模块的输出端与路径修复模块的输入端电连接,所述偏移检测模块的输入端与gps定位模块的输出端电连接,所述巡检机器人控制系统的输入端与预设路径模块的输出端电连接,所述预设路径模块的输出端与定位点提取模块的输入端电连接,所述定位点提取模块的输出端与偏移检测模块的输入端电连接。
9.作为本发明的进一步方案:所述控制底座的上表面设置有激光雷达,所述激光雷达位于环境气体检测仪的右侧,所述环境气体检测仪设置在控制底座的上表面。
10.作为本发明的进一步方案:所述控制底座的一侧设置有音箱,所述摄像机的右侧面设置有拾音器。
11.作为本发明的进一步方案:所述控制底座的外表面与安全触边固定连接,所述安全触边位于控制底座的右侧面。
12.作为本发明的进一步方案:所述升降机构包括四个电动推杆,四个所述电动推杆的顶端与控制底座的下表面固定连接,四个所述电动推杆的底端与同一个支撑框架的上表面固定连接。
13.作为本发明的进一步方案:所述控制底座的左侧面与两个滑轮的右侧面固定连接,两个所述连接绳分别滑动连接在两个滑轮的外表面。
14.作为本发明的进一步方案:所述控制底座的下表面开设有两个燕尾滑槽,两个燕尾滑槽内壁的一侧分别与两个弹簧的一端固定连接,两个所述燕尾滑板分别滑动连接在两个燕尾滑槽内。
15.作为本发明的进一步方案:所述长条杆的形状设置为六边形,所述连接轴内壁的形状与长条杆的形状相适配。
16.本发明的有益效果在于:
17.1、本发明通过延伸装置对辅助轮的驱动,使得辅助轮可以进行位移展开运动,延长辅助轮对本装置的支撑宽度,同时使得辅助轮可以越过不平整的路面,使得辅助轮可以平稳的在平整路面行驶,则采用此方式可以有效避免本装置在不平整路面及较为恶劣的路面行驶,保证了本装置行驶的平稳性,防止倾斜造成本装置难以正常使用,同时本装置还可以有效规避沟壑,无需转变路线,不仅节省时间,同时大大提高了本装置使用多样性;
18.2、本发明通过设置支撑结构,升降柱在向上顶升摄像机的同时,使得连接绳可以推动燕尾滑板进行长度的延伸,进而再通过燕尾滑板与滚轮的配合可以有效增加控制底座的支撑面积,保证了本装置支撑的稳定性,同时升降柱顶升即可通过连接绳控制燕尾滑板运动,无需加设驱动设备,且结构简单,同时可以根据摄像机的高度实现支撑面积的调节;
19.3、本发明通过定位点提取模块和gps定位模块的配合,使得gps定位模块可以实时获取本装置的精确位置,同时定位点提取模块可以提取本装置所达到预设定位点,则偏移
检测模块对两者进行分析比对,则可以得出本装置是否偏移所行驶路线,然后即可通过路径修复模块快速对路径重新规划修正,从而可以达到自动修正的作用。
附图说明
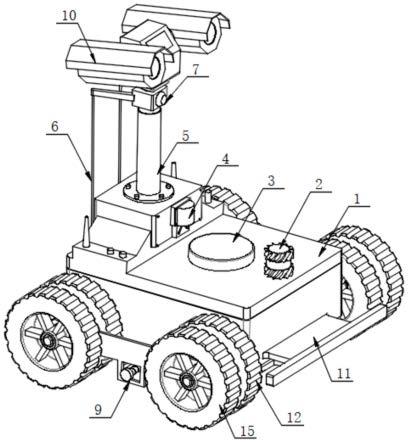
20.图1为本发明立体的结构示意图;
21.图2为本发明左视的立体结构示意图;
22.图3为本发明仰视的立体结构示意图;
23.图4为本发明支撑结构立体的结构示意图;
24.图5为本发明连接轴立体的结构示意图;
25.图6为本发明系统的结构示意图;
26.图中:1控制底座、2激光雷达、3环境气体检测仪、4音箱、5升降柱、6支撑结构、61连接条、62连接绳、63燕尾滑板、64连接块、65滑轮、66连接板、67滚轮、68弹簧、7拾音器、8升降机构、81电动推杆、82支撑框架、9延伸装置、91双轴电机、92螺母、93连接杆、94螺杆、10摄像机、11安全触边、12移动轮、13长条杆、14支撑板、15辅助轮、16连接轴、17轴承。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1-6所示,本发明提供了一种基于路径检验修正的轮式巡检机器人,包括控制底座1,通过设置控制底座1,控制底座1还包括采用耐低温-20℃直流无刷电机、传动结构及减速器,从而可以实现驱动连接轴16的旋转,且直流无刷电机总功率为1600w,动力强劲,控制底座1的上表面与升降柱5的底端固定连接,通过设置升降柱5,升降柱5采用耐低温-20℃电动缸及直流无刷电机,行程达500mm,可以平稳、精确地将摄像机10移动到指定高度,巡检机器人高速运动时,可将摄像机10降到最低,保证巡航时机器人的稳定性,巡检机器人巡检时候,可将摄像机10升到最高,轻松应对不同巡检高度要求,电动缸外侧配备了装饰柱体,摄像机10及拾音器7等部件的线缆可以隐藏在柱体内,外观简洁美观,升降柱5的顶端与摄像机10的下表面固定连接,通过设置摄像机10,摄像机10采用海康威视双光谱云台摄像机,同时配备了可见光机芯和热成像机芯,可见光机芯能够对有读数的表盘及油位表计数据读取,自动记录和判断,并根据预设报警值提出报警,读数的误差小于5%,其中图像识别、开关状态读取、表计识别正确率可达到100%,热成像机芯能够对所内设备进行温度检测,并对缺陷或故障进行自动分析判断,并提出预警,云台可以实现水平360
°
,垂直-90
°
~90
°
范围内的自由转动,满足不同角度巡检的需要,摄像机10的左侧面与支撑结构6的两端固定连接,支撑结构6设置在控制底座1的下表面,控制底座1的下表面与升降机构8的顶端固定连接,通过设置升降机构8,使得升降机构8可以将控制底座1顶起,进而便于移动轮12和辅助轮15与地面分离。
29.控制底座1的内部设置有两个连接轴16,两个连接轴16的外表面均固定连接有两个移动轮12,两个连接轴16的内部均设置有两个长条杆13,两个长条杆13的两端均固定连
接有两个辅助轮15,通过设置移动轮12和辅助轮15,且移动轮12和辅助轮15为抓地力性能的橡胶轮,其外径达320mm,具有良好的通过性和适应性,两个长条杆13的外表面均套接有两个轴承17,通过设置轴承17,使得轴承17可以保证长条杆13的稳定旋转,前方的两个轴承17和后方的两个轴承17的外表面分别与两个支撑板14的内部固定连接,两个支撑板14的相对面设置有延伸装置9,延伸装置9设置在控制底座1的下表面。
30.支撑结构6包括两个连接条61,两个连接条61外表面的一端与摄像机10的左侧面固定连接,两个连接条61的下表面分别与两个连接绳62的一端固定连接,通过设置连接绳62,且连接绳62可以起到传动作用,进而便于通过摄像机10提升实现控制燕尾滑板63的运动,两个连接绳62的另一端分别与两个连接块64的外表面一侧固定连接,两个连接块64的相背面分别与两个燕尾滑板63的相对面固定连接,两个燕尾滑板63的一侧与弹簧68的一端固定连接,两个燕尾滑板63的下表面与同一个连接板66的上表面固定连接,连接板66的下表面与两个滚轮67的上表面固定连接,通过设置滚轮67,滚轮67具有良好的滚动性,使得连接板66可以流畅移动。
31.延伸装置9包括双轴电机91,双轴电机91的上表面与控制底座1的下表面固定连接,双轴电机91的两个输出轴分别与两个螺杆94的相对面固定连接,两个螺杆94的外表面均螺纹连接有螺母92,通过设置螺杆94和螺母92,且两个螺杆94的螺纹方向设置相反,使得两个螺杆94旋转可以控制两个螺母92相互靠近或相互远离运动,两个螺母92外表面的两侧均固定连接有连接杆93,前方的两个连接杆93和后方的两个连接杆93分别与两个支撑板14的相对面固定连接,通过设置连接杆93,从而可以起到与支撑板14的连接,控制底座1包括巡检机器人控制系统,巡检机器人控制系统的输出端与偏移检测模块的输入端电连接,偏移检测模块的输出端与路径修复模块的输入端电连接,偏移检测模块的输入端与gps定位模块的输出端电连接,巡检机器人控制系统的输入端与预设路径模块的输出端电连接,通过定位点提取模块和gps定位模块的配合,使得gps定位模块可以实时获取本装置的精确位置,同时定位点提取模块可以提取本装置所达到预设定位点,则偏移检测模块对两者进行分析比对,则可以得出本装置是否偏移所行驶路线,然后即可通过路径修复模块快速对路径重新规划修正,从而可以达到自动修正的作用,预设路径模块的输出端与定位点提取模块的输入端电连接,定位点提取模块的输出端与偏移检测模块的输入端电连接。
32.如图1所示,控制底座1的上表面设置有激光雷达2,通过设置激光雷达2,激光雷达2选用ouster高分辨率中距激光雷达2,以密集的32线束激光实现360
°
三维高速扫描,探测距离高达120m,测量精度精确至
±
3cm,采用自主研发的定位导航算法,配合自主研发的运动控制板,同时激光雷达2也同时用作避障功能,可根据图像及识别出障碍的大小速度,设定报警等级,实现智能避障,避免了其它避障方式多发的遇障碍漏报,误报等情况,激光雷达2位于环境气体检测仪3的右侧,通过设置环境气体检测仪3,环境气体检测仪3采用进口运算芯片,气体单元采用电化学和催化燃烧式传感器,有极好的灵敏度和重复性,具有双频数据采集及自动锁定技术,可同时采集多种环境气体参数,tvoc测量单元采用高灵敏度气体检测头,使用高性能信号采集电路,环境气体检测仪3设置在控制底座1的上表面,控制底座1的一侧设置有音箱4,摄像机10的右侧面设置有拾音器7,通过设置音箱4和拾音器7,且音箱4和拾音器7均为防水型,可以满足噪音采集功能及双向语音通话功能需要,同时,拾音器7采用高灵敏度全指向性防水防尘咪头,全向拾音、声音清晰自然,采用专业音频处理技
术,有效防止语音信号失真及衰减,内置雷击保护、电源极性反接保护和静电保护,并且音箱4采用高品质数字功放,支持wav、mp3格式音频文件,支持rs485、rs232、can接口控制,可无级调节音量,最大音量达到100db,适用于各种工业环境,控制底座1的外表面与安全触边11固定连接,通过设置安全触边11,进而可以在受到撞击时对控制底座1进行保护,安全触边11位于控制底座1的右侧面。
33.如图3和图4所示,升降机构8包括四个电动推杆81,四个电动推杆81的顶端与控制底座1的下表面固定连接,四个电动推杆81的底端与同一个支撑框架82的上表面固定连接,通过设置电动推杆81,使得电动推杆81可以控制支撑框架82进行上下运动,控制底座1的左侧面与两个滑轮65的右侧面固定连接,通过设置滑轮65,使得滑轮65可以对连接绳62进行导向,同时可以保证连接绳62的流畅滑动,两个连接绳62分别滑动连接在两个滑轮65的外表面,控制底座1的下表面开设有两个燕尾滑槽,通过设置燕尾滑槽,从而使得燕尾滑板63可以在燕尾滑槽内平稳滑动,两个燕尾滑槽内壁的一侧分别与两个弹簧68的一端固定连接,通过设置弹簧68,使得摄像机10在向下运动时,弹簧68的弹性力可以带动燕尾滑板63顺利复位,两个燕尾滑板63分别滑动连接在两个燕尾滑槽内。
34.如图5所示,长条杆13的形状设置为六边形,通过设置长条杆13,且长条杆13设置为六边形,使得长条杆13在起到与连接轴16连接的同时,还可以通过多边形结构防止连接轴16在长条杆13表面自转,进而使得连接轴16可以顺利驱动长条杆13旋转,连接轴16内壁的形状与长条杆13的形状相适配。
35.本发明工作原理:
36.s1、巡检时,则首先通过控制底座1的驱动机构对连接轴16进行控制,使得连接轴16带动移动轮12和辅助轮15进行行驶,在行驶至指定地点,可以通过升降柱5控制摄像机10进行高度提升,同时摄像机10通过连接条61带动连接绳62进行高度提升,使得连接绳62通过连接块64带动燕尾滑板63进行运动,使得燕尾滑板63伸出控制底座1,使得滚轮67可以支撑,同时可通过摄像机10进行图像采集,并且还可以通过拾音器7进行噪音采集,及通过环境气体检测仪3对气体进行采集检测,并且通过激光雷达2可以进行目标探测;
37.s2、在遇到不平整路面时,则通过电动推杆81控制支撑框架82向下运动,使得支撑框架82可以向下与地面接触,同时使得支撑框架82可以将控制底座1向上顶起,使得移动轮12与地面分离;
38.s3、然后控制双轴电机91运行,使得双轴电机91驱动螺杆94旋转,使得螺杆94带动螺母92进行移动,使得两个螺母92相互远离,使得螺母92带动连接杆93进行移动,使得连接杆93带动支撑板14进行移动,使得长条杆13可以从连接轴16的内部伸出,进而使得辅助轮15可以进行延伸,使得辅助轮15越过不平整路面,此时即可控制电动推杆81缩短,使得电动推杆81带动支撑框架82向上复位,使得移动轮12和辅助轮15与地面接触,此时即可继续进行行驶。
39.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
40.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结
构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
41.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1