机器人控制装置和机器人的制作方法
1.本技术涉及机器人技术领域,特别是涉及一种机器人控制装置和机器人。
背景技术:
2.机器人可代替或协助人类完成各种工作,凡是枯燥的、危险的、有毒的、有害的工作,都可由机器人完成。机器人除了广泛应用于制造业领域外,还应用于资源勘探开发、救灾排险、医疗服务、家庭娱乐、军事和航天等其他领域。
3.当机器人应用在安全领域要求较高的应用场所,如医疗服务、人机协作领域等,就需要有安全输入控制功能。传统的安全控制方法是在机器人中设置一个安全控制开关,安全控制开关在接收到停止指令时就断开,使机器人断电。然而,当安全控制开关出现故障时,机器人不能可靠断电,导致机器人被损坏。因此,传统的机器人安全控制方法使用不可靠。
技术实现要素:
4.基于此,有必要针对传统的机器人安全控制方法使用不可靠的问题,提供一种机器人控制装置和机器人。
5.第一方面,提供一种机器人控制装置,包括第一延时模块、第二延时模块、逻辑控制模块和输出控制模块,所述第一延时模块和所述第二延时模块均连接所述逻辑控制模块,所述逻辑控制模块连接所述输出控制模块;
6.所述第一延时模块用于接入安全功能控制信号,延时后发送至所述逻辑控制模块,所述第二延时模块用于接入安全功能控制信号,延时后发送至所述逻辑控制模块,所述逻辑控制模块在接收到来自所述第一延时模块或来自所述第二延时模块的安全功能控制信号时,将所述安全功能控制信号发送至所述输出控制模块,所述输出控制模块用于根据所述安全功能控制信号对机器人本体进行安全控制。
7.在其中一个实施例中,所述第一延时模块为硬件延时模块,所述第二延时模块为软件延时模块。
8.在其中一个实施例中,所述安全功能控制信号包括第一安全功能控制信号和第二安全功能控制信号,所述第一延时模块包括第一硬件延时电路和第二硬件延时电路,所述第二延时模块包括第一软件延时单元和第二软件延时单元;
9.所述第一硬件延时电路用于接入所述第一安全功能控制信号,并发送至所述逻辑控制模块,所述第二硬件延时电路用于接入所述第二安全功能控制信号,并发送至所述逻辑控制模块,所述第一软件延时单元用于接入所述第一安全功能控制信号,并发送至所述逻辑控制模块,所述第二软件延时单元用于接入所述第二安全功能控制信号,并发送至所述逻辑控制模块。
10.在其中一个实施例中,还包括安全输入模块,所述安全输入模块用于接入所述第一安全功能控制信号和第二安全功能控制信号,所述第一硬件延时电路、所述第二硬件延
时电路、所述第一软件延时单元和所述第二软件延时单元均连接所述安全输入模块。
11.在其中一个实施例中,所述安全输入模块包括第一安全输入单元、第二安全输入单元、第三安全输入单元和第四安全输入单元,所述第一硬件延时电路用于通过所述第一安全输入单元接入所述第一安全功能控制信号,所述第一软件延时单元用于通过所述第二安全输入单元接入所述第一安全功能控制信号,所述第二软件延时单元用于所述第三安全输入单元接入所述第二安全功能控制信号,所述第二硬件延时电路用于通过所述第四安全输入单元接入所述第二安全功能控制信号。
12.在其中一个实施例中,所述安全输入模块包括光耦。
13.在其中一个实施例中,所述逻辑控制模块包括第一逻辑与电路、第二逻辑与电路和逻辑或电路,所述第一逻辑与电路的输入侧连接所述第一延时模块,所述第二逻辑与电路的输入侧连接所述第二延时模块,所述第一逻辑与电路和所述第二逻辑与电路的输出侧均连接所述逻辑或电路的输入侧,所述逻辑或电路的输出侧连接所述输出控制模块。
14.在其中一个实施例中,还包括反馈模块,所述反馈模块连接所述输出控制模块,并连接所述第二延时模块。
15.在其中一个实施例中,所述第一延时模块的延时时长小于所述第二延时模块的延时时长。
16.第二方面,提供一种机器人,包括机器人本体和如上述的机器人控制装置。
17.上述机器人控制装置和机器人,包括第一延时模块、第二延时模块、逻辑控制模块和输出控制模块,第一延时模块和第二延时模块均连接逻辑控制模块,逻辑控制模块连接输出控制模块,第一延时模块用于接入安全功能控制信号,延时后发送至逻辑控制模块,第二延时模块用于接入安全功能控制信号,延时后发送至逻辑控制模块,逻辑控制模块在接收到来自第一延时模块或来自第二延时模块的安全功能控制信号时,将安全功能控制信号发送至输出控制模块,输出控制模块用于根据安全功能控制信号对机器人本体进行安全控制。第一延时模块和第二延时模块都可以接入安全功能控制信号,既使第一延时模块和第二延时模块中的一路出现异常,逻辑控制模块也能将安全功能控制信号发送至输出控制单元,使输出控制单元根据安全功能控制信号对机器人本体进行安全控制,提供了安全冗余,保障了机器人的安全,此外,第一延时模块和第二延时模块均将安全功能控制信号延时后发送至逻辑控制模块,可以使输出控制模块延时关断,避免机械部分硬关断造成的损坏,从而延长机器人的使用寿命,使用可靠。
附图说明
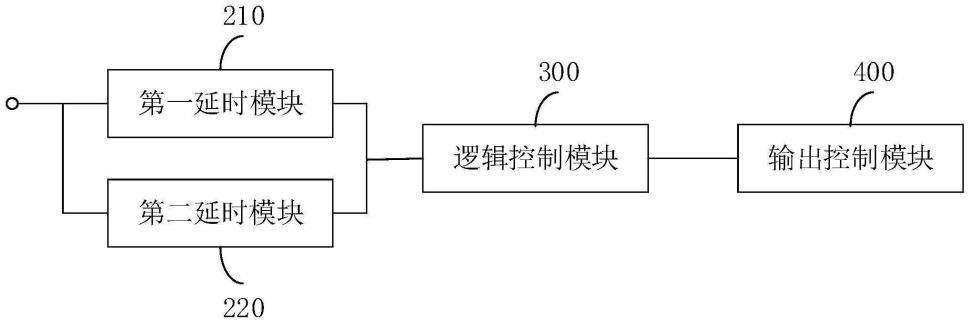
18.图1为一个实施例中机器人控制装置的结构框图;
19.图2为一个实施例中机器人控制装置的结构示意图;
20.图3为另一个实施例中机器人控制装置的结构框图。
具体实施方式
21.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
22.在一个实施例中,提供一种机器人控制装置,用于对机器人本体进行控制,可以在生产机器人时集成在机器人内部,以提供更好的保护,也能在机器人出厂后,根据需要设置在机器人中,便于拆卸更换等。请参见图1,机器人控制装置包括第一延时模块210、第二延时模块220、逻辑控制模块300和输出控制模块400,第一延时模块210和第二延时模块220均连接逻辑控制模块300,逻辑控制模块300连接输出控制模块400。第一延时模块210用于接入安全功能控制信号,延时后发送至逻辑控制模块300,第二延时模块220用于接入安全功能控制信号,延时后发送至逻辑控制模块300,逻辑控制模块300在接收到来自第一延时模块210或来自第二延时模块220的安全功能控制信号时,将安全功能控制信号发送至输出控制模块400,输出控制模块400用于根据安全功能控制信号对机器人本体进行安全控制。
23.第一延时模块210和第二延时模块220都可以接入安全功能控制信号,既使第一延时模块210和第二延时模块220中的一路出现异常,逻辑控制模块300也能将安全功能控制信号发送至输出控制单元,使输出控制单元根据安全功能控制信号对机器人本体进行安全控制,提供了安全冗余,保障了机器人的安全,此外,第一延时模块210和第二延时模块220均将安全功能控制信号延时后发送至逻辑控制模块300,可以使输出控制模块400延时关断,避免机械部分硬关断造成的损坏,从而延长机器人的使用寿命,使用可靠。
24.其中,安全功能控制信号可以为急停控制开关信号,用于表征需要对机器人进行急停处理,安全功能控制信号也可以为安全门开关信号,用于表征需要对机器人进行功率调整或驱动输出等安全控制。
25.具体地,第一延时模块210用于接入安全功能信号,并将安全功能信号进行延时之后,发送至逻辑控制模块300,作为逻辑控制模块300控制输出控制模块400对机器人本体进行安全控制的基础,延时后再将安全功能信号发送至逻辑控制模块300,可以减少机器人本体硬关断造成的损坏。第一延时模块210的延时时长可根据实际需求设置,只要本领域技术人员认为实现即可。
26.第二延时模块220也用于接入安全功能信号,并将安全功能信号进行延时之后,发送至逻辑控制模块300,作为逻辑控制模块300控制输出控制模块400对机器人本体进行安全控制的基础,延时后再将安全功能信号发送至逻辑控制模块300,可以减少机器人本体硬关断造成的损坏。第二延时模块220的延时时长可根据实际需求设置,只要本领域技术人员认为实现即可。第二延时模块220作为第一延时模块210的补充,可以提供一路安全冗余。
27.逻辑控制模块300在接收到来自第一延时模块210或来自第二延时模块220的安全功能控制信号时,将安全功能控制信号至输出控制模块400。也就是说,既使第一延时模块210和第二延时模块220中的一路出现异常,只要逻辑控制模块300接收到了来自第一延时模块210或第二延时模块220中其中一个模块的安全功能控制信号,都能将安全功能控制信号传输至输出控制模块400,保障机器人的安全。在本实施例中,逻辑控制模块300包括逻辑或电路,第一延时模块210和第二延时模块220的输出侧均连接逻辑或电路的输入侧,逻辑或电路的输出侧连接输出控制模块400。只要逻辑或电路输入侧的其中一个端子接入的安全功能控制信号有效,逻辑或电路的输出侧就能正常输出安全功能控制信号,结构简单,使用便捷。
28.输出控制模块400用于根据安全功能控制信号对机器人本体进行安全控制。根据输出控制模块400的结构不同,对机器人本体进行安全控制的方式也不一样。例如,当输出
控制模块400包括功率控制单元时,对机器人本体进行安全控制可以为调整输出至机器人本体的功率,例如降低输出至机器人本体的功率,使机器人本体逐渐降低工作负荷等。当输出控制模块400包括电源控制回路时,对机器人本体进行安全控制可以为控制接通或断开输出至机器人本体的功率,使机器人本体得电或断电等。可以理解,在其他实施例中,输出控制模块400也可以为其他结构,只要本领域技术人员认为可以实现即可。
29.在一个实施例中,第一延时模块210为硬件延时模块,第二延时模块220为软件延时模块。第一延时模块210和第二延时模块220采用不同的延时方式,可以优势互补,提高机器人控制装置的工作性能。
30.具体地,硬件延时模块一般为基于硬件实现的延时模块,软件延时模块可以为基于软件等方式设置延时的模块。硬件延时模块的结构并不是唯一的,在本实施例中,硬件延时模块包括延时芯片和配合延时芯片工作的外围电路,延时芯片可以实现精确延时,延时时长可控,外围电路可以保障延时芯片的工作性能。可以理解,在其他实施例中,硬件延时模块也可以为其他结构,例如可以为rc延时电路,rc延时电路的延时时间可通过改变电阻或电容的大小来调整,结构简单,硬件延时模块也可以包括单运放构成的单稳延时电路或晶体管延时电路等,硬件延时模块还可以为包括定时器或技术器的电路,只要本领域技术人员认为可以实现即可。
31.软件延时模块可以为控制器,控制器包括延时计数器。当控制器的输入端子接收到安全功能控制信号时,控制器内的延时计数器开始工作,将安全功能控制信号进行延时后,控制器的输出端子再将延时后的安全功能控制信号输出至逻辑控制模块300。第二延时模块220的延时时长可为第一延时模块210的延时时长加一定余量,如10ms,其作用是当第一延时模块210延时失效时,第二延时模块220仍然能输出安全功能控制信号至逻辑控制模块300,使逻辑控制模块300正常控制输出控制模块400。
32.在一个实施例中,请参见图2,安全功能控制信号包括第一安全功能控制信号和第二安全功能控制信号,第一延时模块210包括第一硬件延时电路和第二硬件延时电路,第一硬件延时电路为硬件延时电路1,第二硬件延时电路为硬件延时电路2。第二延时模块220包括第一软件延时单元和第二软件延时单元。第一软件延时单元为cpu1处理单元,第二软件延时单元为cpu2处理单元。第一硬件延时电路用于接入第一安全功能控制信号,并发送至逻辑控制模块300,第二硬件延时电路用于接入第二安全功能控制信号,并发送至逻辑控制模块300,第一软件延时单元用于接入第一安全功能控制信号,并发送至逻辑控制模块300,第二软件延时单元用于接入第二安全功能控制信号,并发送至逻辑控制模块300。
33.具体地,安全功能控制信号一般包括两路信号,即第一安全功能控制信号和第二安全功能控制信号。第一延时模块210包括第一硬件延时电路和第二硬件延时电路,第二延时模块220包括第一软件延时单元和第二软件延时单元,第一延时模块210和第二延时模块220提供了四条支路。第一硬件延时电路用于接入第一安全功能控制信号,并发送至逻辑控制模块300,第二硬件延时电路用于接入第二安全功能控制信号,并发送至逻辑控制模块300,第一软件延时单元用于接入第一安全功能控制信号,并发送至逻辑控制模块300,第二软件延时单元用于接入第二安全功能控制信号,并发送至逻辑控制模块300。即,第一安全功能控制信号可以通过不同的两个支路(第一硬件延时电路所在的支路和第一软件延时单元所在的支路)传输至逻辑控制模块300,第二安全功能控制信号也可以通过不同的两个支
路(第二硬件延时电路所在的支路和第二软件延时单元所在的支路)传输至逻辑控制模块300。
34.可以理解,在其他实施例中,硬件延时模块还包括其他数量的硬件延时电路,硬件延时模块也可以包括其他数量的软件延时单元,以提供不同数量的信号传输支路。进一步地,硬件延时模块包括的硬件延时电路与软件延时模块包括的软件延时单元的数量相等,接入第一安全功能控制信号的硬件延时电路与软件延时单元的数量之和与接入第二安全功能控制信号的硬件延时电路与软件延时单元的数量之和相等,以对称的电路结构接入第一安全功能控制信号和第二安全功能控制信号,提高机器人控制装置的工作性能。
35.由于第一延时模块210包括第一硬件延时电路和第二硬件延时电路,第二延时模块220包括第一软件延时单元和第二软件延时单元,因此,逻辑控制模块300在同时接收到来自第一硬件延时电路和第二硬件延时电路的信号,即接收到第一安全功能控制信号和第二安全功能控制信号时,将第一安全功能控制信号和第二安全功能控制信号发送至输出控制模块400。或者,逻辑控制模块300在同时接收到来自第一软件延时单元和第二软件延时单元的信号,即接收到第一安全功能控制信号和第二安全功能控制信号时,将第一安全功能控制信号和第二安全功能控制信号发送至输出控制模块400。逻辑控制模块300在只接收到第一安全功能控制信号和第二安全功能控制信号其中的一路信号,或者第一安全功能控制信号和第二安全功能控制信号均未接收到时,考虑安全功能控制信号有误,此时逻辑控制模块300不能控制输出控制模块400工作,可以避免对机器人本体的误操作,提高机器人的工作性能。
36.在一个实施例中,请参见图3,机器人控制装置还包括安全输入模块100,安全输入模块100用于接入第一安全功能控制信号和第二安全功能控制信号,第一硬件延时电路、第二硬件延时电路、第一软件延时单元和第二软件延时单元均连接安全输入模块100。
37.具体地,第一硬件延时电路、第二硬件延时电路、第一软件延时单元和第二软件延时单元均连接安全输入模块100,第一硬件延时电路和第一软件延时单元均通过安全输入模块100接入第一安全功能控制信号,可以提高接入的第一安全功能控制信号的信号质量。第二硬件延时电路和第二软件延时单元均通过安全输入模块100接入第二安全功能控制信号,可以提高接入的第二安全功能控制信号的信号质量。安全输入模块100的结构并不是唯一的,例如可以包括滤波器,用于过滤杂波,提高质量。可以理解,在其他实施例中,安全输入模块100的结构也可以为其他,只要本领域技术人员认为可以实现即可。
38.在一个实施例中,安全输入模块100包括第一安全输入单元、第二安全输入单元、第三安全输入单元和第四安全输入单元。第一硬件延时电路用于通过第一安全输入单元接入第一安全功能控制信号,第一软件延时单元用于通过第二安全输入单元接入第一安全功能控制信号,第二软件延时单元用于第三安全输入单元接入第二安全功能控制信号,第二硬件延时电路用于通过第四安全输入单元接入第二安全功能控制信号。
39.具体地,第一硬件延时电路、第一软件延时单元、第二软件延时单元和第二硬件延时电路处于不同的电路支路上,通过不同的支路接入信号。进一步地,第一硬件延时电路和第一软件延时单元分别通过不同的安全单元接入第一安全功能控制信号,第二硬件延时电路和第二软件延时单元分别通过不同的安全单元接入第二安全功能控制信号,使每个接入信号的支路上都有一个安全单元,进一步提高了接入的信号的质量。
40.可以理解,在其他实施例中,安全输入模块100也可以包括其他数量的安全单元,例如提供与硬件延时电路和软件延时单元的数量相等的安全单元,使每一个硬件延时电路和/或软件延时单元都能对应连接一个安全单元,整体提高接入信号的质量。
41.在一个实施例中,安全输入模块100包括光耦。进一步地,第一安全输入单元为光耦1,第二安全输入单元为光耦2,第三安全输入单元为光耦3,第四安全输入单元为光耦4。光耦以光为媒介来传输信号的器件,通常把发光器与受光器封装在同一管壳内。光耦的数量并不是唯一的,以每一个硬件延时电路或每一个软件延时单元分别连接一个光耦为例,每个光耦中发光器的阳极用于接入第一安全功能控制信号或第二安全功能控制信号,受光器连接一个硬件延时电路或一个软件延时单元。当输入端加第一安全功能控制信号或第二安全功能控制信号时,发光器发出光线,受光器接收光线之后就产生光电流,从输出端流出,从而实现了“电—光—电”控制,以光为媒介把输入端信号耦合到输出端的光电耦合器,具有体积小、寿命长、无触点,抗干扰能力强,输出和输入之间绝缘,单向传输信号等优点。可以理解,在其他实施例中,光耦的数量也可以为其他,只要本领域技术人员认为可以实现即可。
42.在一个实施例中,请参见图2,逻辑控制模块300包括第一逻辑与电路、第二逻辑与电路和逻辑或电路,第一逻辑与电路为逻辑与电路1,第二逻辑与电路为逻辑与电路2。第一逻辑与电路的输入侧连接第一延时模块210,第二逻辑与电路的输入侧连接第二延时模块220,第一逻辑与电路和第二逻辑与电路的输出侧均连接逻辑或电路的输入侧,逻辑或电路的输出侧连接输出控制模块400。
43.具体地,第一逻辑与电路的输入侧连接第一延时模块210,当接收到来自第一延时模块210的信号时,第一逻辑与电路的输出侧输出信号至逻辑或电路的输入侧。第二逻辑与电路的输入侧连接第二延时模块220,当接收到来自第二延时模块220的信号时,第二逻辑与电路的输出侧输出信号至逻辑或电路的输入侧。第一逻辑与电路和第二逻辑与电路的输出侧均连接逻辑或电路的输入侧,逻辑或电路在接收到来自第一逻辑与电路和第二逻辑与电路中的至少一个信号时,将信号输出至输出控制模块400,实现信号自动传输。
44.进一步地,当第一延时模块210包括第一硬件延时电路和第二硬件延时电路,第二延时模块220包括第一软件延时单元和第二软件延时单元时,第一硬件延时电路和第二硬件延时电路均连接第一逻辑与电路的输入侧,第一软件延时单元和第二软件延时单元均连接第二逻辑与电路的输入侧。第一逻辑与电路在同时接收到来自第一硬件延时电路和第二硬件延时电路的信号时,即同时接收到第一安全功能控制信号和第二安全功能控制信号时,输出信号至逻辑或电路。第二逻辑与电路在同时接收到来自第一软件延时单元和第二软件延时单元的信号时,即同时接收到第一安全功能控制信号和第二安全功能控制信号时,输出信号至逻辑或电路,以确保接入的安全功能控制信号完整。
45.在一个实施例中,请参见图3,机器人控制装置还包括反馈模块500,反馈模块500连接输出控制模块400,并连接第二延时模块220。反馈模块500用于检测输出控制模块400的工作参数,并发送至第二延时模块220,由第二延时模块220进行后续处理。机器人控制装置形成闭环反馈,有助于提高机器人控制装置的工作可靠性。
46.具体地,第二延时模块220可以为控制器,反馈模块500可以检测输出控制模块400的工作参数并反馈至控制器。工作参数的类型并不是唯一的,例如可以为输出控制模块400
的开关的闭合或断开状态、输出功率的大小等。第二延时模块220在接收到工作参数后对工作参数进行判断,若根据工作参数判断出现故障时,可以发送信息提示指令至信息提示装置进行提示,提醒工作人员及时处理。反馈模块500的结构并不是唯一的,例如可以为采样电路,可以采集输出控制模块400的电压和电流大小,由此计算输出控制模块400的输出功率。反馈模块500也可以为信号线,第二延时模块220根据信号线中是否传输有电流来判断输出控制模块400是否处于工作状态等,结构简单。可以理解,在其他实施例中,反馈模块500也可以为其他结构,或连接其他器件,实现对其他器件的检测等,只要本领域技术人员认为可以实现即可。
47.在一个实施例中,第一延时模块210的延时时间小于第二延时模块220的延时时间。在第一延时模块210故障时,第二延时模块220控制仍然正常,提高机器人控制装置的使用可靠性。
48.为了更好地理解上述实施例,以下结合一个具体的实施例进行详细的解释说明。在一个实施例中,请参见图1-3,机器人控制装置包括安全输入模块100、第一延时模块210、第二延时模块220、逻辑控制模块300、输出控制模块400和反馈模块500,第一延时模块210为硬件延时模块,第二延时模块220为软件延时模块,安全功能控制信号可以为急停控制开关信号或安全门开关信号,包括第一安全功能控制信号和第二安全功能控制信号,第一安全功能控制信号为sto1,第二安全功能控制信号为sto2。硬件延时模块包括第一硬件延时电路和第二硬件延时电路,第一硬件延时电路为硬件延时电路1,第二硬件延时电路为硬件延时电路2,软件延时模块包括第一软件延时单元和第二软件延时单元,第一软件延时单元为cpu1处理单元,第二软件延时单元为cpu2处理单元。安全输入模块100包括第一安全输入单元、第二安全输入单元、第三安全输入单元和第四安全输入单元,第一安全输入单元为光耦1,第二安全输入单元为光耦2,第三安全输入单元为光耦3,第四安全输入单元为光耦4。逻辑控制模块300包括第一逻辑与电路、第二逻辑与电路和逻辑或电路,第一逻辑与电路为逻辑与电路1,第二逻辑与电路为逻辑与电路2。
49.具体地,机器人正常工作时,sto1、sto2有输入信号,sto1、sto2分别通过光耦1/2/3/4将信号输入到cpu1/2处理单元和硬件延时电路单元1/2,硬件延时电路1输出信号与硬件延时电路2输出信号直接输入到逻辑与电路1,再通过输出到逻辑或电路,输出信号到输出控制模块400,控制功率或驱动输出。cpu1/2处理单元分别经过延时计数控制单元后再输入到逻辑与电路2,延时计数控制单元是cpu延时计数器,当收到延时信号时cpu延时计数器工作,进行延时输出控制,延迟时间可根据硬件设置关断时间加一定余量,如10ms,其作用是当双路硬件延时失效时,双cpu仍然能关断功率驱动单元。当两个延时计数控制单元输出的信号同时有效时,逻辑与电路2再输出信号至逻辑或电路,逻辑或电路直接输出信号至输出控制模块400,输出控制模块400控制功率或驱动输出。反馈模块500通过检测输出控制模块400的工作参数,将输出状态反馈到cpu1、2,达到闭环控制目的。反馈模块500可以通过一个电路进行状态反馈诊断,当硬件延时或cpu延时动作后,通过控制逻辑芯片将一路信号反馈到cpu作为输入信号,达到闭环诊断作用。诊断功率控制单元或电源单元是关断的,即是安全可靠的。
50.当sto1有效而sto2无效时,光耦1、2输出信号到硬件延时电路1和cpu1处理单元,此时逻辑与电路1没有接收到硬件延时电路2的信号,逻辑与电路1没有输出信号到逻辑或
电路单元,逻辑或电路单元没有输出。当cpu1处理单元接收光耦2信号时,在与cpu2通讯时没收到sto2的信号,cpu1不能输出信号到逻辑与电路2单元,逻辑或电路就没有收到信号,就不能驱动输出控制模块400回路。
51.同理当sto2有效而sto1无效时,光耦3、4输出信号到硬件延时电路2和cpu2处理单元。此时逻辑与电路1没有接收到硬件延时电路1的信号,逻辑与电路1没有输出信号到逻辑或电路单元,逻辑或电路单元没有输出。当cpu2处理单元接收光耦3信号时,在与cpu1通讯时没收到sto1的信号,cpu2不能输出安全信号到逻辑与电路2单元,逻辑或电路就没有收到信号,就不能驱动输出控制模块400回路。
52.若sto1、sto2同时有效,其中一路输入光耦异常,如光耦输入1异常,则逻辑与电路1不能收到硬件延时电路1的信号就没有输出信号。此时cpu1、2工作正常,通过延时计数控制后输出到逻辑与电路2,逻辑或电路收到逻辑与电路2后可以输出信号到输出控制模块400。但在设计硬件延时电路和软件延时计数控制延时时,可以设计硬件延时小于软件延时时间,使硬件延时电路故障时cpu1、2控制仍然正常,确保机器人控制装置工作安全有效。通过反馈模块500判断电路异常时,可通过信息提示装置发出提示信息,但仍安全关断输出控制模块400。可通过硬件延时电路1/2输出状态信号反馈到cpu来诊断哪路安全电路异常。通过一路控制功率电源的安全继电器辅助开关反馈信号到cpu,或通过控制pwm波形缓冲器的一路输入输出信号反馈到cpu检测,来确保安全关断安全输出控制单元。若光耦2或3故障,硬件延时电路控制正常,能关断输出控制模块400,通过反馈模块500可明确故障位置。可用电路采样硬件延时电路输出反馈信号来确定故障位置通道。
53.通过设置上述机器人控制装置,不用购买安全模块,可以实现软件和硬件的安全冗余,以实现功能的安全,还可以简化设计,节省布线,节省安装空间。
54.上述机器人控制装置,包括第一延时模块210、第二延时模块220、逻辑控制模块300和输出控制模块400,第一延时模块210和第二延时模块220均连接逻辑控制模块300,逻辑控制模块300连接输出控制模块400,第一延时模块210用于接入安全功能控制信号,延时后发送至逻辑控制模块300,第二延时模块220用于接入安全功能控制信号,延时后发送至逻辑控制模块300,逻辑控制模块300在接收到来自第一延时模块210或来自第二延时模块220的安全功能控制信号时,将安全功能控制信号发送至输出控制模块400,输出控制模块400用于根据安全功能控制信号对机器人本体进行安全控制。第一延时模块210和第二延时模块220都可以接入安全功能控制信号,既使第一延时模块210和第二延时模块220中的一路出现异常,逻辑控制模块300也能将安全功能控制信号发送至输出控制单元,使输出控制单元根据安全功能控制信号对机器人本体进行安全控制,提供了安全冗余,保障了机器人的安全,此外,第一延时模块210和第二延时模块220均将安全功能控制信号延时后发送至逻辑控制模块300,可以使输出控制模块400延时关断,避免机械部分硬关断造成的损坏,从而延长机器人的使用寿命,使用可靠。
55.在一个实施例中,提供一种机器人,包括机器人本体和如上述的机器人控制装置。机器人本体一般包括实现机器人基础功能的结构,机器人控制装置的具体内容已在上文中详细说明,在此不再赘述。
56.上述机器人,包括第一延时模块210、第二延时模块220、逻辑控制模块300和输出控制模块400,第一延时模块210和第二延时模块220均连接逻辑控制模块300,逻辑控制模
块300连接输出控制模块400,第一延时模块210用于接入安全功能控制信号,延时后发送至逻辑控制模块300,第二延时模块220用于接入安全功能控制信号,延时后发送至逻辑控制模块300,逻辑控制模块300在接收到来自第一延时模块210或来自第二延时模块220的安全功能控制信号时,将安全功能控制信号发送至输出控制模块400,输出控制模块400用于根据安全功能控制信号对机器人本体进行安全控制。第一延时模块210和第二延时模块220都可以接入安全功能控制信号,既使第一延时模块210和第二延时模块220中的一路出现异常,逻辑控制模块300也能将安全功能控制信号发送至输出控制单元,使输出控制单元根据安全功能控制信号对机器人本体进行安全控制,提供了安全冗余,保障了机器人的安全,此外,第一延时模块210和第二延时模块220均将安全功能控制信号延时后发送至逻辑控制模块300,可以使输出控制模块400延时关断,避免机械部分硬关断造成的损坏,从而延长机器人的使用寿命,使用可靠。
57.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
58.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1