一种应急救援用穿戴式外骨骼机械手臂的制作方法
1.本发明涉及救援机械手臂技术领域,具体涉及一种应急救援用穿戴式外骨骼机械手臂。
背景技术:
2.在应急救援时,救援人员常常需借助外部工具来实现对于障碍物的快速清理,该工具往往由救援人员进行手持操作,具有较佳的掌控性,其中包括外骨骼机械手臂,目前,现有的外骨骼机械手臂难以操控,即使是穿戴式外骨骼机械手臂,操作者仍然难以实现对于机械手臂的操控,无法提供较为针对性的清理。
3.因此,有必要提供一种应急救援用穿戴式外骨骼机械手臂以解决上述问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种应急救援用穿戴式外骨骼机械手臂,包括:
5.穿戴马甲;
6.对称设置于穿戴马甲两侧的两个连接环,所述连接环与穿戴马甲之间铰接有多个第二调节杆;
7.承接座,其固定于连接环的一侧;
8.机械臂,其设置于所述承接座上;以及
9.控制器,所述控制器能够控制机械臂以及第二调节杆进行动作;
10.且,当操作者利用自身手臂驱动连接环移动后,所述控制器能够控制第二调节杆进行相应的伸缩调节,从而驱动连接环沿该方向继续移动。
11.进一步,作为优选,所述穿戴式马甲的底部采用多个第一调节杆铰接有下支撑件,所述下支撑件为c型,且用于与外部腿支撑机构相连。
12.进一步,作为优选,所述穿戴式马甲与下支撑件的一侧共同贴附有柔性背板,所述柔性背板上阵列有沿竖向分布的多个磁性吸附块。
13.进一步,作为优选,所述机械臂包括:
14.基座,其固定于所述承接座上;
15.第一臂体,其铰接至所述基座远离承接座的一端,且所述第一臂体和基座之间铰接有第一伸缩杆;
16.第二臂体,其铰接至所述第一臂体远离基座的一端,且所述第二臂体与第一臂体之间铰接有第二伸缩杆;以及
17.固定于第二臂体远离第一臂体一端的爪座,所述爪座上铰接有多个爪体,所述爪体与爪座之间铰接有第三伸缩杆。
18.进一步,作为优选,所述第二臂体为伸缩杆结构,其输出端与爪座相连。
19.进一步,作为优选,所述第二调节杆包括:
20.缸体;
21.塞体,其密封滑动设置于所述缸体中,且所述缸体的左端连通有第一进出头,右端连通有第二进出头,以便为缸体内抽放液压油,从而驱动塞体进行移动;
22.杆体,其一端连接至所述塞体上,另一端密封滑动穿出所述缸体;以及
23.多组沿缸体轴向阵列分布且嵌入至缸体侧壁上的磁性检测组件,且每组为圆周阵列分布的多个,且所述磁性检测组件至少能够提供磁性;
24.且,所述塞体上圆周阵列嵌入有多个与磁性检测组件相对应的第一磁块。
25.进一步,作为优选,相邻两组磁性检测组件之间的间距为第一步距。
26.进一步,作为优选,所述缸体中还开设有径向贯穿孔,以便放置磁性检测组件;
27.所述磁性检测组件包括:
28.封垫,其固定于贯穿孔靠近塞体一侧;
29.第二磁块,其滑动设置于所述贯穿孔中,且能够与第一磁块呈相互吸引状态;以及
30.检测块,其固定于贯穿孔远离塞体一侧,且所述检测块采用弹簧与第二磁块相连,且所述弹簧的一端与检测块中的拉力传感器相连。
31.进一步,作为优选,所述拉力传感器与控制器电连,以便拉力传感器将其实时检测的拉力数据反馈至控制器中,且当塞体移动一个第一步距时,此时拉力传感器检测到拉力达到阈值,则由控制器控制塞体沿该方向继续移动2~5个第一步距。
32.进一步,作为优选,所述第一步距的长度为1~5cm。
33.与现有技术相比,本发明提供了一种应急救援用穿戴式外骨骼机械手臂,具有以下有益效果:
34.本发明实施例中,一方面操作者可利用自身手臂进行救援,此时,操作者的手臂需注意保持不接触连接环或不对连接环进行施力,另一方面,操作者可利用自身手臂驱动连接环进行移动,且,之后所述控制器能够控制调节杆进行相应的伸缩调节,从而驱动连接环沿该方向继续移动,并且通过对于连接环的位置调节能够实现对于机械臂整体的位置调节,之后可通过机械臂实现辅助救援,从而能够实现对于不同障碍物提供不同的清理手段,提高了救援时对于障碍物清理的针对性;
35.本发明实施例中,操作者利用自身手臂驱动机械臂进行整体位置调节时,操作者只需承担第一小段位移所消耗的力,第二调节杆继续承担该方向上的大段位移所消耗的力,有利于在提高控制精准度以及控制便捷性的基础上,减少操作者的受力情况,便于后续继续操作机械臂进行救援。
附图说明
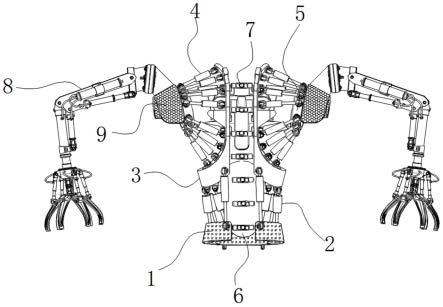
36.图1为一种应急救援用穿戴式外骨骼机械手臂的整体结构示意图;
37.图2为一种应急救援用穿戴式外骨骼机械手臂中机械臂的结构示意图;
38.图3为一种应急救援用穿戴式外骨骼机械手臂中第二调节杆的结构示意图;
39.图4为一种应急救援用穿戴式外骨骼机械手臂中磁性检测组件的结构示意图;
40.图中:1、下支撑件;2、第一调节杆;3、穿戴马甲;4、第二调节杆;5、连接环;6、柔性背板;7、磁性吸附块;8、机械臂;9、承接座;81、基座;82、第一臂体;83、第一伸缩杆;84、第二臂体;85、第二伸缩杆;86、爪座;87、爪体;88、第三伸缩杆;41、缸体;42、杆体;43、塞体;44、
第一磁块;45、第一进出头;46、磁性检测组件;47、第二进出头;48、贯穿孔;461、封垫;462、第二磁块;463、弹簧;464、检测块。
具体实施方式
41.请参阅图1~4,本发明提供了一种应急救援用穿戴式外骨骼机械手臂,包括:
42.穿戴马甲3;
43.对称设置于穿戴马甲3两侧的两个连接环5,所述连接环5与穿戴马甲3之间铰接有多个第二调节杆4;
44.承接座9,其固定于连接环5的一侧;
45.机械臂8,其设置于所述承接座9上;以及
46.控制器,所述控制器能够控制机械臂8以及第二调节杆4进行动作;
47.且,当操作者利用自身手臂驱动连接环5移动后,所述控制器能够控制第二调节杆4进行相应的伸缩调节,从而驱动连接环5沿该方向继续移动。
48.也就是说,本实施例中,机械臂8是随连接环5的移动而移动,通过对于连接环5的位置调节能够实现对于机械臂8整体的位置调节,而该调节,则是由操作者主导,另外,当操作者利用自身手臂驱动连接环5移动后,所述控制器能够控制调节杆4进行相应的伸缩调节,从而驱动连接环5沿该方向继续移动,因此,操作者只需承担某一小段位移所消耗的力,第二调节杆继续承担该方向上的大段位移所消耗的力,有利于在提高控制精准度以及控制便捷性的基础上,减少操作者的受力情况,便于后续继续操作机械臂进行救援。
49.作为较佳的实施例,所述穿戴式马甲3的底部采用多个第一调节杆2铰接有下支撑件1,所述下支撑件1为c型,且用于与外部腿支撑机构相连。
50.外部腿支撑机构可以选择立柱结构,通过立柱来实现对于下支撑件1的支撑,从而支撑穿戴式马甲3,并且第一调节杆2可以选择手动调节的调节杆结构,在此不再赘述。
51.作为较佳的实施例,所述穿戴式马甲3与下支撑件1的一侧共同贴附有柔性背板6,所述柔性背板6上阵列有沿竖向分布的多个磁性吸附块7。
52.在穿戴时,可以先穿戴外置铁块的特制衣物,从而与磁性吸附块7相互吸附,进而提升穿戴式马甲的穿戴牢固性。
53.本实施例中,如图2,所述机械臂8包括:
54.基座81,其固定于所述承接座9上;
55.第一臂体82,其铰接至所述基座81远离承接座9的一端,且所述第一臂体82和基座81之间铰接有第一伸缩杆83;
56.第二臂体84,其铰接至所述第一臂体82远离基座81的一端,且所述第二臂体84与第一臂体82之间铰接有第二伸缩杆85;以及
57.固定于第二臂体84远离第一臂体82一端的爪座86,所述爪座86上铰接有多个爪体87,所述爪体87与爪座86之间铰接有第三伸缩杆88。
58.作为较佳的实施例,所述第二臂体84为伸缩杆结构,其输出端与爪座相连。
59.本实施例中,如图3,所述第二调节杆4包括:
60.缸体41;
61.塞体43,其密封滑动设置于所述缸体41中,且所述缸体41的左端连通有第一进出
头45,右端连通有第二进出头47,以便为缸体41内抽放液压油,从而驱动塞体43进行移动;
62.杆体42,其一端连接至所述塞体43上,另一端密封滑动穿出所述缸体41;以及
63.多组沿缸体41轴向阵列分布且嵌入至缸体41侧壁上的磁性检测组件46,且每组为圆周阵列分布的多个,且所述磁性检测组件46至少能够提供磁性;
64.且,所述塞体43上圆周阵列嵌入有多个与磁性检测组件46相对应的第一磁块44。
65.另外,相邻两组磁性检测组件46之间的间距为第一步距。
66.具体的,如图4,所述缸体41中还开设有径向贯穿孔48,以便放置磁性检测组件46;
67.所述磁性检测组件46包括:
68.封垫461,其固定于贯穿孔48靠近塞体43一侧;
69.第二磁块462,其滑动设置于所述贯穿孔48中,且能够与第一磁块44呈相互吸引状态;以及检测块464,其固定于贯穿孔48远离塞体43一侧,且所述检测块464采用弹簧463与第二磁块462相连,且所述弹簧的一端与检测块464中的拉力传感器相连。
70.当塞体移动时,其能够吸附与其对应的第二磁块,而第二磁块则能够通过弹簧对拉力传感器施加拉力,为保证第二磁块的稳定性,第二磁块与贯穿孔之间还可配置一定的阻尼。
71.所述拉力传感器与控制器电连,以便拉力传感器将其实时检测的拉力数据反馈至控制器中,且当塞体移动一个第一步距时,此时拉力传感器检测到拉力达到阈值,则由控制器控制塞体沿该方向继续移动2~5个第一步距。
72.所述第一步距的长度为1~5cm。
73.也就是说,当操作者的手臂驱动连接环5进行移动时,第二调节杆4会随之伸缩,第二调节杆4的伸缩过程包括塞体的移动,当塞体移动时,控制器则控制液压的抽放从而驱动塞体沿该方向继续移动,从而实现,操作者仅需依靠自身力量驱动连接环5移动一小步,连接环5则能够继续移动一大步,一方面提高了对于连接环5位置方向的精准控制,另一方面还能够节省人力。
74.在具体实施时,操作者先身穿外置铁块的特制衣物,然后穿上穿戴马甲3,一方面操作者利用自身手臂进行救援,此时,操作者的手臂需注意保持不接触连接环5或不对连接环5进行施力,另一方面,操作者利用自身手臂驱动连接环5移动后,所述控制器能够控制调节杆4进行相应的伸缩调节,从而驱动连接环5沿该方向继续移动,并且通过对于连接环5的位置调节能够实现对于机械臂8整体的位置调节,之后可通过机械臂8实现辅助救援。
75.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1