仿生结构协同控制的方法、仿生结构、电子设备及介质与流程
本公开涉及智能机器人领域,尤其涉及一种仿生结构协同控制的方法、仿生结构、电子设备及介质。
背景技术:
1、针对上肢残疾、排爆、燃料加工、复杂物品搬运等场景,提出了仿生手、仿生机械臂或者仿生机器人等的解决方案。
2、仿生技术是综合运用仿生学、机械电子、材料学、生物医学和信息技术的交叉前沿技术,具有精度高、重量轻、扩展强、灵活度高的优势,有助于满足上肢残疾人士在工作和生活上的日常需求,并为工业、服务等场景提供精细的终端操作工具。
3、目前仿生手具有多根手指,每个手指具有多个关节,在进行精细动作时存在容易损坏的情况。
技术实现思路
1、为了解决或者至少部分地解决发现的以下技术问题:在仿生手控制多根手指进行精细动作时,各个手指之间可能会发生相互碰撞或者挤压,导致多个关节之间损坏的情况,本公开的实施例提供了一种仿生结构协同控制的方法、仿生结构、电子设备及介质。
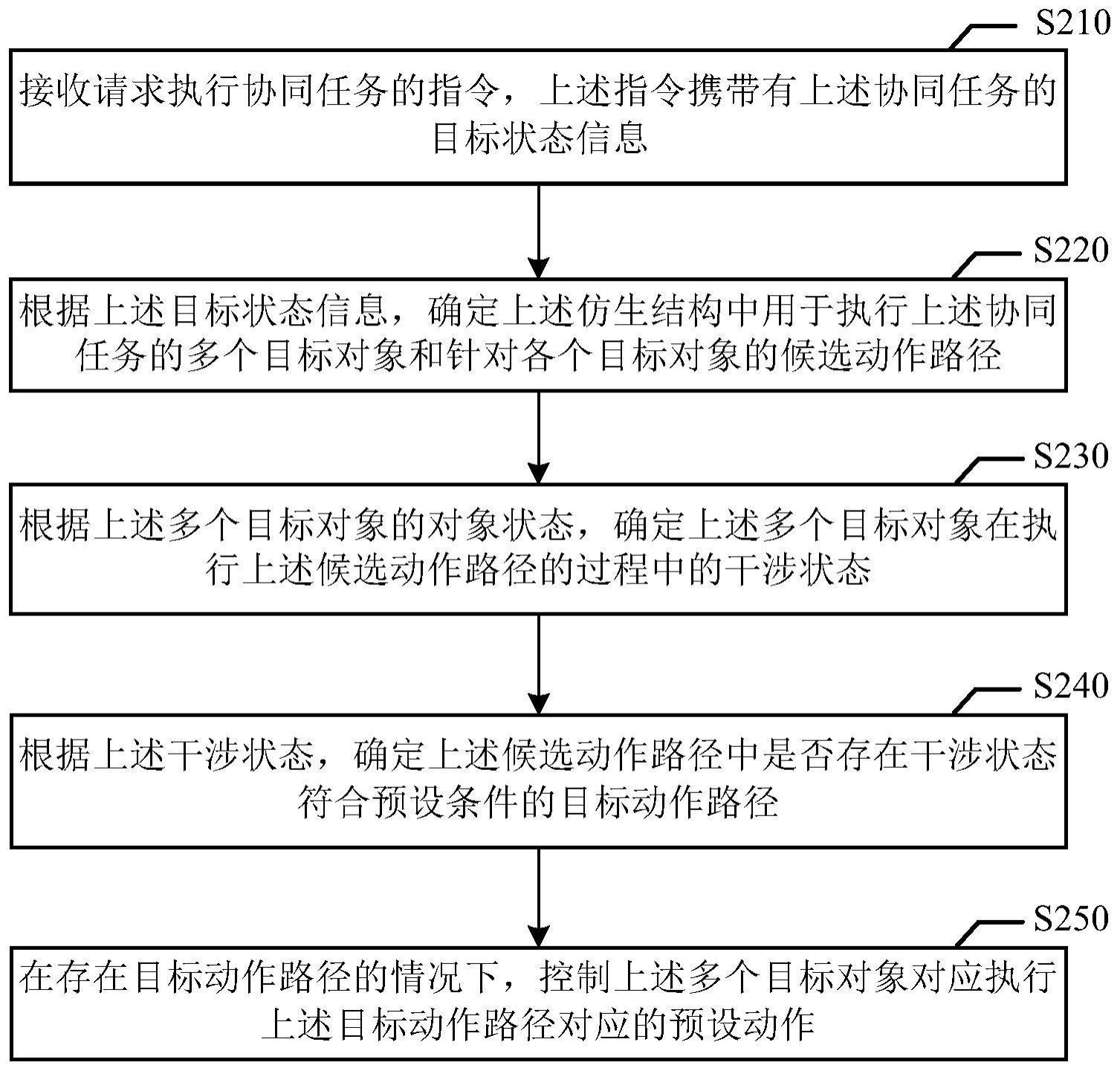
2、第一方面,本公开的实施例提供了一种仿生结构协同控制的方法。上述方法包括:接收请求执行协同任务的指令,上述指令携带有上述协同任务的目标状态信息;根据上述目标状态信息,确定上述仿生结构中用于执行上述协同任务的多个目标对象和针对各个目标对象的候选动作路径;根据上述多个目标对象的对象状态,确定上述多个目标对象在执行上述候选动作路径的过程中的干涉状态,上述干涉状态用于表征上述多个目标对象在执行任务时的相互影响程度;根据上述干涉状态,确定上述候选动作路径中是否存在干涉状态符合预设条件的目标动作路径;在存在目标动作路径的情况下,控制上述多个目标对象对应执行上述目标动作路径对应的预设动作。
3、根据本公开的实施例,根据上述多个目标对象的对象状态,确定上述多个目标对象在执行上述候选动作路径的过程中的干涉状态,包括:根据上述多个目标对象的当前对象状态,确定上述多个目标对象执行上述候选动作路径对应的候选状态时序信息;根据上述候选状态时序信息进行计算,得到上述多个目标对象的干涉状态;或者,根据上述候选状态时序信息和预先构建的干涉度分布图,确定上述多个目标对象的干涉状态;其中上述干涉度分布图用于表征上述仿生结构中的各个对象在各个状态时序信息下对应的干涉度,上述对象状态时序信息包括上述候选状态时序信息。
4、根据本公开的实施例,根据上述候选状态时序信息进行计算,得到上述多个目标对象的干涉状态,包括:根据上述协同任务的任务执行阶段信息和上述候选状态时序信息,计算以下重叠状态中的一种:上述多个目标对象之间的重叠状态;或者,上述多个目标对象之间以及上述多个目标对象与参考物体之间的重叠状态,上述参考物体包括以下至少一种:上述仿生结构中的参考部位、或者上述协同任务的处理对象;根据各个任务类型下的重叠状态与干涉度之间的映射关系表和计算得到的上述重叠状态,确定上述多个目标对象基于上述候选动作路径执行上述协同任务对应的干涉度。
5、根据本公开的实施例,上述方法还包括:预先构建干涉度分布图,上述干涉度分布图包括:上述仿生结构中的各个对象在驱动器状态时序信息、关节点状态时序信息或部件状态时序信息的至少一项下对应的干涉度分布图。上述预先构建干涉度分布图,包括:构建上述仿生结构的数字仿真模型和物理模型中的至少一项;基于上述数字仿真模型的仿真结果和上述物理模型的实测结果中的至少一项,确定上述仿生结构中的各个对象之间的状态对应关系;在针对上述仿生结构的可执行任务进行模拟的过程中,以上述仿生结构的参考部位作为坐标参考原点,根据上述状态对应关系,确定上述仿生结构中各个对象相对于上述参考部位执行可选动作路径对应的运动状态时序信息;根据上述运动状态时序信息,确定上述仿生结构中的各个对象之间的重叠状态,或者,确定上述各个对象之间以及上述各个对象与参考物体之间的重叠状态,上述参考物体包括以下至少一种:上述参考部位、或者上述协同任务的处理对象;根据上述重叠状态和上述可执行任务的任务类型,生成关于上述运动状态时序信息的干涉度信息,上述运动状态时序信息和上述干涉度信息构成上述干涉度分布图。
6、根据本公开的实施例,上述仿生结构中的各个对象包括驱动器、关节点和关节点间的部位,上述状态对应关系包括:各个驱动器的驱动器状态与各个关节点的关节点状态之间的对应关系,各个关节点的关节点状态与各关节点间的部件状态之间的对应关系。
7、根据本公开的实施例,上述对象状态包括以下至少一种:驱动器状态、关节点状态或关节点间的部件状态;上述候选状态时序信息包括以下至少一种:驱动器状态时序信息、关节点状态时序信息或部件状态时序信息;其中,实时状态下,上述驱动器状态与上述关节点状态之间的对应关系是确定的,上述关节点状态与上述部件状态之间的对应关系是确定的。
8、根据本公开的一种实施例,上述目标状态信息中包含:执行上述协同任务所对应的终点状态信息,上述终点状态信息包括:到达特定位置且呈现特定姿态;根据上述目标状态信息,确定上述仿生结构中用于执行上述协同任务的多个目标对象和针对各个目标对象的候选动作路径,包括:根据上述终点状态信息,将上述任务的执行过程划分为至少一个任务执行阶段;在各任务执行阶段确定对应的目标对象和各个目标对象的候选动作路径。
9、根据本公开的另一种实施例,上述目标状态信息中包含:执行上述协同任务所对应的终点状态信息,一个或多个中间关键状态信息;上述终点状态信息包括:到达特定位置且呈现特定姿态;根据上述目标状态信息,确定上述仿生结构中用于执行上述协同任务的多个目标对象和针对各个目标对象的候选动作路径,包括:根据上述终点状态信息和上述中间关键状态信息,将上述任务的执行过程划分为至少一个任务执行阶段;在各任务执行阶段确定对应的目标对象和各个目标对象的候选动作路径,上述候选动作路径对应的候选状态时序信息的集合涵盖上述中间关键状态。
10、根据本公开的实施例,根据上述干涉状态,确定上述候选动作路径中是否存在干涉状态符合预设条件的目标动作路径,包括:根据上述协同任务的任务类型,确定上述仿生结构对应的干涉程度阈值;确定上述候选动作路径中是否存在特定候选动作路径对应的干涉状态小于上述干涉程度阈值;在存在特定候选动作路径的情况下,将上述特定候选动作路径确定为目标动作路径。
11、根据本公开的实施例,上述方法还包括:在不存在上述目标动作路径的情况下,针对干涉度不满足预设条件的特定动作位置进行重新调整,得到调整后动作路径;计算调整后动作路径的干涉状态是否符合上述预设条件;在调整后动作路径的干涉状态符合上述预设条件的情况下,将上述调整后动作路径确定为目标动作路径,并控制上述多个目标对象对应执行上述目标动作路径对应的预设动作;在调整后动作路径的干涉状态不符合上述预设条件的情况下,发出关于上述协同任务无法执行的提示信息。
12、第二方面,本公开的实施例提供了一种仿生结构。上述仿生结构包括:指令接收模块、第一确定模块、第二确定模块、第三确定模块和动作控制模块。上述指令接收模块用于接收请求执行协同任务的指令,上述指令携带有上述协同任务的目标状态信息。上述第一确定模块用于根据上述目标状态信息,确定上述仿生结构中用于执行上述协同任务的多个目标对象和针对各个目标对象的候选动作路径。上述第二确定模块用于根据上述多个目标对象的对象状态,确定上述多个目标对象在执行上述候选动作路径的过程中的干涉状态,上述干涉状态用于表征上述多个目标对象在执行任务时的相互影响程度。上述第三确定模块用于根据上述干涉状态,确定上述候选动作路径中是否存在干涉状态符合预设条件的目标动作路径。上述动作控制模块用于在存在目标动作路径的情况下,控制上述多个目标对象对应执行上述目标动作路径对应的预设动作。
13、根据本公开的实施例,上述仿生结构包括仿生手、仿生手臂或仿生机器人。
14、根据本公开的实施例,上述仿生手、上述仿生手臂或上述仿生机器人包括控制器,上述控制器包括上述第一确定模块、上述第二确定模块、上述第三确定模块和上述动作控制模块。
15、第三方面,本公开的实施例提供了一种电子设备。上述电子设备包括处理器、通信接口、存储器和通信总线,其中,处理器、通信接口和存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现如上所述的仿生结构协同控制的方法。
16、第四方面,本公开的实施例提供了一种计算机可读存储介质。上述计算机可读存储介质上存储有计算机程序,上述计算机程序被处理器执行时实现如上所述的仿生结构协同控制的方法。
17、本公开的实施例提供的技术方案至少具有如下优点的部分或全部:
18、在确定由多个目标对象来共同执行协同任务的场景下,通过确定多个目标对象的候选动作路径,确定多个目标对象在执行候选动作路径的过程中的干涉状态,进而基于干涉状态来确定多个目标对象相互之间的影响程度,基于干涉状态在各个目标对象的一个或多个候选动作路径中确定是否存在符合设定条件的目标动作路径,并对应进行动作控制;在控制多个目标对象执行动作之前,通过对多个目标对象在执行一个或多个候选动作路径的过程中的相互影响程度进行预判,进而提前避免了各个目标对象在实际执行过程中的相互碰撞、挤压或者不符合设定程度下的动作设置,实现了处理任务时对多目标对象在多自由度运动场景下的协调控制;可广泛应用于仿生手、仿生手臂或仿生机器人。
- 还没有人留言评论。精彩留言会获得点赞!