一种带有齿式制动器的机器人关节的制作方法
本发明属于高端智能设备行业的智能机器人制造,具体涉及一种带有齿式制动器的机器人关节。
背景技术:
1、随着科学技术、工业制造和社会经济水平的高速发展,高端智能设备已经推广应用至各行业,特别是智能机器人更是广泛应用于各个技术领域的各种工艺流程中,并且日益趋向小型化和民用化发展;而机器人关节作为连接控制算法模块和智能设备本体结构的桥梁,是机器人的重要组成部分,也是当今机器人领域的一个重要研究方向。针对小型民用机器人,低速大转矩永磁同步电机集成小减速比行星减速器的半直驱关节设计方案,由于其具有成本低、重量轻、方便小型化、输出扭矩相对较高等众多优势,已经在多种足式机器人以及部分机械臂上得到了运用。但是,传统的半直驱机器人关节因为没有集成制动器,导致需要设计额外的控制算法来驱动电机实现机器人的位置保持以及紧急制动,能量消耗高,并且难以保证机器人运动的安全性能。现有技术中的机器人传动机构通常采用电磁制动器,在所需的制动扭矩下,存在体积太大、重量太重、成本太高等缺陷,不能适应小型化和民用化的智能机器人应用需求,因而难以集成应用到小型民用化的半直驱机器人关节上。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明目的在于提供一种带有齿式制动器的机器人关节,体积小,重量轻,能耗低,能够满足小型化和民用化智能机器人的应用需求,结构简单,操作方便,安全可靠。
2、本发明所采用的技术方案为:
3、一种带有齿式制动器的机器人关节,包括有动力机构、传动机构和制动机构;
4、所述传动机构同轴设置于动力机构内部,制动机构设置于动力机构外部一侧;
5、所述动力机构包括有动力输入端和动力输出端,传动机构包括有传动输入端和传动输出端,动力输出端连接至传动输入端,动力输入端连接至外部电源,传动输出端连接至机器人关节的下级运动部件;
6、所述制动机构包括有制动输入端和制动输出端,制动输入端设置于动力机构外部一侧,制动输出端连接至动力输出端;
7、所述制动输入端通过制动控制机构连接至制动输出端,制动控制机构能够驱动制动输入端与制动输出端互相连接实现制动,或者驱动制动输入端与制动输出端互相分离解除制动。
8、所述动力机构为外转子永磁同步电机,所述传动机构为行星减速器;
9、所述行星减速器同轴设置于外转子永磁同步电机内部,所述齿式制动器设置于外转子永磁同步电机外部一侧;
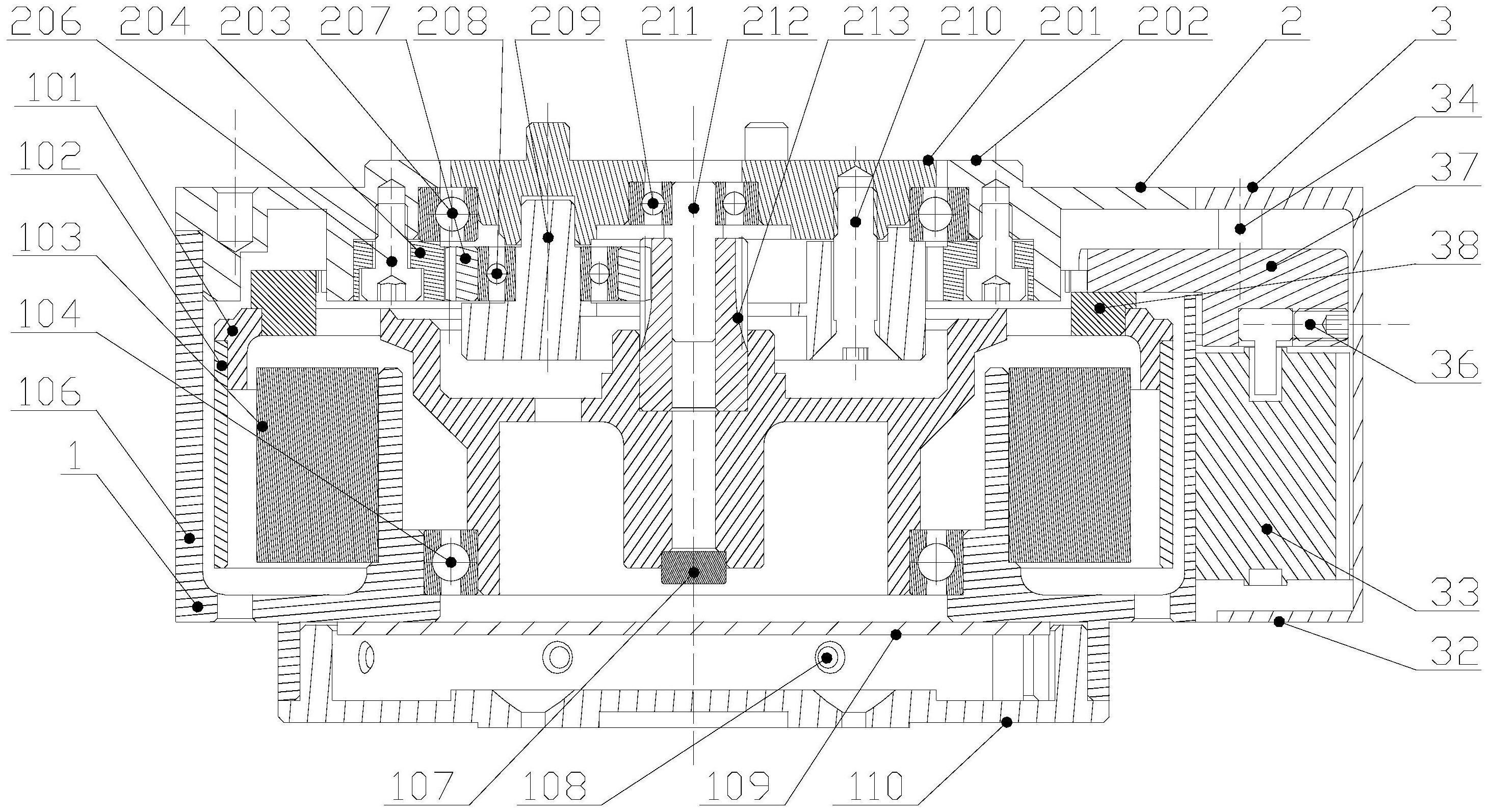
10、所述外转子永磁同步电机包括机壳、定子和外转子,定子和外转子同轴设置于机壳内部,定子底部连接有电路板,电路板构成动力输入端,外转子构成动力输出端;所述制动输出端连接至外转子;
11、所述行星减速器包括有太阳轮、行星轮组件和内齿圈,所述太阳轮固定连接至外转子,太阳轮构成传动输入端;所述内齿圈同轴设置于太阳轮外部,行星轮组件的行星轮设置于太阳轮与内齿圈之间,行星轮同时与太阳轮和内齿圈啮合,内齿圈固定连接于机壳上,行星轮组件构成传动输出端。
12、所述外转子包括有外转子支撑架、外转子钢圈和转子轴承,外转子支撑架通过转子轴承可转动地同轴安装于机壳内,外转子钢圈固定设置于外转子支撑架上;定子固定连接于机壳上;
13、所述制动输出端固定连接在外转子支撑架上,制动输入端设置在机壳上,制动控制机构也连接至电路板,电路板能够为制动控制机构提供动力,从而驱动制动输入端与制动输出端互相连接实现制动,或者驱动制动输入端与制动输出端互相分离解除制动。
14、所述机壳为圆筒状结构,机壳内腔的下段设置有隔套,定子固定套装于隔套外壁上,电路板固定设置于机壳底板下方,电路板电连接至定子;机壳底端中部设置有外转子轴承孔,外转子支撑架的下段同轴设置于隔套内部,外转子支撑架的下端通过转子轴承可转动地设置于外转子轴承孔内;外转子支撑架的顶端设置有翻折至定子与机壳之间空间内的外限位环,外转子钢圈设置于定子与机壳之间空间内,外转子钢圈的上端通过过盈配合固定套装在在外限位环外部;
15、所述外转子支撑架中心设置有内支撑轴,内支撑轴的底端设置有下台阶孔,下台阶孔内固定设置有编码器磁铁;内支撑轴的上端设置有上台阶孔,太阳轮的下段固定连接在上台阶孔内,太阳轮的上段与行星轮组件的行星轮啮合。
16、所述制动机构为齿式制动器,齿式制动器包括有制动齿圈、制动滑块、电磁铁、制动器罩壳、导向轴和直线轴套,制动器罩壳固定设置于机壳外侧,电磁铁固定设置于制动器罩壳内部;制动器罩壳的内顶面上固定设置有两根导向轴,制动滑块的两侧边通过直线轴套滑动套装于导向轴上;制动滑块底端固定连接于电磁铁的铁芯上;
17、所述制动齿圈固定设置于外转子支撑架的顶端上方,制动齿圈上表面设置有限位槽;制动滑块的内端伸入至机壳内部,制动滑块伸入至机壳内部的内段下表面设置有限位限位凸台,限位凸台的截面形状与限位槽的截面形状相同;
18、制动滑块构成制动输入端,制动齿圈构成制动输出端,电磁铁构成制动控制机构。
19、所述制动滑块外端设置有顶紧螺丝,制动滑块底部设置有限位沉孔,制动滑块通过限位沉孔套装于电磁铁的铁芯上,并通过顶紧螺丝限位顶紧。
20、所述制动齿圈上表面均匀设置有若干径向限位齿,相邻两个限位齿之间空间构成限位槽;所述制动滑块的内段下表面并排设置有三个限位凸台,三个限位凸台均沿着制动齿圈的径向设置。
21、所述制动齿圈底面上设置有多个向下凸出的限位块,外转子支撑架顶面上设置有多个限位口,制动齿圈通过限位块与限位口互相配合固定嵌装于外转子支撑架上。
22、所述机壳上端设置有上端盖,内齿圈固定连接于上端盖内表面上;所述上端盖中部还通过上端盖轴承可转动地设置有输出法兰,所述太阳轮的上段通过中心轴孔固定设置有太阳轮轴,太阳轮轴的上端通过太阳轮轴承可转动地连接于输出法兰内表面上;
23、所述行星轮组件包括有行星架和三个行星轮,行星架固定连接于输出法兰上;行星架上沿圆周方向均匀设置有三个行星轮限位槽,每个行星轮限位槽中心位置固定设置有行星轮轴,每个行星轮通过行星轮轴承可转动地设置于行星轮轴上;行星架中心位置贯穿设置有传动腔,传动腔的直径大于三个行星轮的内切圆直径,使得三个行星轮的轮齿能够伸入至传动腔内,并与太阳轮啮合;
24、所述行星架的外径小于三个行星轮的外切圆直径,使得三个行星轮的轮齿能够伸出至行星架外部,并与内齿圈啮合。
25、所述机壳下端设置有下端盖,下端盖罩覆于电路板外部;
26、所述内齿圈外侧面上设置有半圆形的限位凹槽,限位凹槽内设置有定位销,内齿圈通过定位销与上端盖定位连接。
27、本发明的有益效果为:
28、一种带有齿式制动器的机器人关节,作为传动机构的行星减速器同轴设置于作为动力机构的外转子永磁同步电机内部,采用齿式制动器作为制动机构设置于动力机构外部一侧;外转子永磁同步电机的定子由电路板输入电流,驱动外转子经行星减速器的太阳轮带动行星轮组件旋转,通过行星轮组件传递动力驱动输出法兰旋转,从而实现传动输出;体积小,重量轻,能耗低,能够满足小型化和民用化智能机器人的应用需求,有利于在小型民用化领域集成应用半直驱机器人关节,结构简单,操作方便,安全可靠。
- 还没有人留言评论。精彩留言会获得点赞!