一种用于月球基地建造的可移动操作球形机器人
1.本发明涉及一种用于月球基地建造的可移动操作球形机器人,具体地说一种带有超冗余操作臂的球形机器人,可以通过球体内部机械臂的作用实现球形机器人的全向移动、球壳开合、对外操作等,同时可通过与其他机器人的相互通信,实现环境适应与多机协作,属于机器人领域。
背景技术:
2.月面运输与操作设施作为国际月球科研站的核心组成部分,为月面长期工作支持系统和月面科研设施系统提供物品运输与操作,我国的航天技术研发成就已为往返地外星球提供了成熟的条件,因此,开展外星球基地建造机器人的研究已成为国内外关注的重点和必然发展趋势。月球环境极恶劣:路面崎岖、真空、昼夜温差大、月尘污染、长月夜、低重力等等,对机器人的设计提出了巨大的挑战。球形机器人具有全向移动、密闭、防倾覆、驱动少的优势,使其具备快速灵活运动能力和极端环境下自我保护能力。针对月球表面的极端环境和基地建造的复杂任务约束,笔者通过球形机器人与机械臂的创新融合,提出一种用于月球基地建造的可移动操作球形机器人,为我国月球基地建造提供技术参考。
3.申请号为202110540392.0公开了一种球形机器人,该机器人球壳内设置有滚动驱动装置和跳跃驱动装置,滚动驱动装置包括支撑机构、承载机构、伺服电机组一和伺服电机组二,跳跃驱动装置包括跳跃机构、锁紧机构和配重平台,提供一种结构紧凑空间利用率高的自助弹跳自救球形机器人。该发明具有良好的通过性,但其并不具备对外操作能力。
4.申请号为202110393069.5公开了一种带臂球形探测机器人,该机器人通过舵机驱动力和重摆及机械臂的重力作用下进行滚动,通过变形组件调节球形壳体展开或闭合,在球壳打开情况下实现机械臂的对外操作。该专利在球体内加装的机械臂仅能在球壳打开时实现对外操作。
5.申请号为201621174315.9公开了一种球形搬运机器人,该发明所述球形机器人以非开合的形式,将两机械臂置于球形机器人两侧,可夹持或放置物品,但其受限于球体本身,可操作空间不大,操作性不高,舍弃了在移动过程中封闭球壳对于本身机械臂的保护作用。
6.综合现有球形机器人和大型空间机械臂的研究思路以及外星球表面复杂极端的任务需求,本发明将球形机器人与超冗余大型空间机械臂的设计理念相融合,提出了一种用于月球基地建造的可移动操作球形机器人:球形机器人赋予机械臂快速灵活运动能力与极端复杂外星球环境下自我保护能力,同时机械臂赋予球形机器人强大的对外操作能力与多机器人单元之间的协作能力,使机器人能够在月球表面极端环境下的基地建设任务中,实现高效可靠的移动和对外操作,具有极大的潜在优势和深远的研究价值。
技术实现要素:
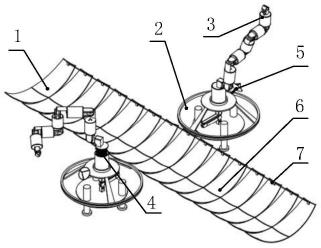
7.本发明提出了一种用于月球基地建造的可移动操作球形机器人。发明所述机器人
通过“刚-柔”耦合超冗余操作臂的构型变化作为球形移动状态的质心变化机构,实现球形机器人的灵活平稳滚动;到达指定位置后,双灵巧臂能够辅助球壳完全打开;两个大型超冗余操作臂与灵巧臂(8)协同操作,完成建造作业。机器人具备可对外操作的球内多臂特性,移动状态下能够实现多机器人的组合协作越障,同时灵巧臂可伸出球壳外进行运动中操作。对外操作状态下能够实现多个超冗余操作臂和灵巧臂的相互协作,完成复杂操作任务。
8.为实现上述目的,本发明提供的解决方案是:
9.所述球形机器人包括柔索驱动可展开球壳(1)、“刚-柔”耦合超冗余操作臂基座(2)、软性末端缓冲关节(3)、“刚-柔”耦合伸缩关节(4)、球内天线(5)、球内太阳帆(6)、自动释放和锁定机构(7)、灵巧臂(8)、灵巧臂末端(9)。所述“刚-柔”耦合超冗余操作臂基座(2),在球形巡航模式下通过自动释放和锁定机构(7)与柔索驱动可展开球壳(1)进行连接,球内太阳帆(6)附于球壳内表面,“刚-柔”耦合超冗余操作臂基座(2)、软性末端缓冲关节(3)、“刚-柔”耦合伸缩关节(4)为球形机器人内部“刚-柔”耦合超冗余操作臂构成单元。“刚-柔”耦合超冗余操作臂通过基座(2)与柔索驱动可展开球壳(1)相连,操作臂末端通过缓冲关节(3)与操作臂连接,“刚-柔”耦合伸缩关节(4)替代了刚性连杆,使得整个操作臂组成具有10个自由度的超冗余操作臂。软性末端缓冲关节(3)为操作臂的末关节,包含对外操作手抓。灵巧臂(8)的首段与超冗余操作臂基座(2)连接,灵巧臂末端(9)可作为支撑单端展开。
10.本发明的运动原理为:
11.在球形巡航模式下,机器人柔索驱动可展开球壳(1)处于密闭状态,球形机器人通过超冗余操作臂作为球形移动状态的质心变化机构,基于质心偏移产生的重力矩的原理,通过“刚-柔”耦合伸缩关节(4)的转动产生质心偏移,实现机器人的灵活平稳滚动。
12.球形机器人上的灵巧臂(8),可在球形巡航模式下,将球壳左右两端的灵巧臂末端(9),分别伸出作为支撑,将整个球壳抬升,使机器人灵巧臂作业模式具备球-腿特性进而提升其越障高度,实现短距离步态行走,提升其越障通过性;对于垂直高度超过球形机器人半径和灵巧臂可支撑最大高度的障碍,通过灵巧臂间的对接功能实现多个机器人的组合形成开链串联型拓扑结构,实现多机协作越障。
13.机器人可通过球壳展开,进入双操作臂作业模式,此时球壳内侧展开,使球内太阳帆(6)开始工作为机器人提供能源,双操作臂由超冗余操作臂基座(2)和灵巧臂末端(9)作为支撑,使左右两个超冗余操作臂,可在空间内实现对外大范围操作。
14.机器人可实现与环境和其他机器人之间的相互通信,通过球内天线(5)单个球形机器人可获知其他机器人的位置,通过预先输入的任务需求,分别移动至预先任务定点,做球壳展开进入双操作臂作业模式,多机器人相互配合,实现协同作业,共同完成月球极端环境下的基地建造复杂任务。
15.本发明的优点与效益:
16.本专利提出了一种用于月球基地建造的可移动操作球形机器人,用机械臂取代重摆的功能提升球形机器人的对外操作能力,通过球壳内部冗余机械臂之间的协作满足内部机构功能需求,结合具备大变形展开能力的球壳,能够使球形机器人在发挥自身优势的同时,在越障能力与对外操作能力方面均会得到大幅度提升,在对外操作状态下可实现多个超冗余操作臂的相互协作,使机器人具备强大的自我保护、越障能力和对外操作能力,能够
有效应对月球表面的维修维护、巡查等复杂任务。具有极大的潜在优势和深远的研究价值。
附图说明
17.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍。
18.图1是所述球形机器人整体结构内部示意图;
19.图2是所述球形机器人在球形巡航模式下的示意图;
20.图3是所述球形机器人在灵巧臂作业模式下的示意图;
21.图4是所述球形机器人在双操作臂作业模式下的示意图;
22.图中的附图标记为:1
‑‑
柔索驱动可展开球壳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑‑“
刚-柔”耦合超冗余操作臂基座3
‑‑
软性末端缓冲关节
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—“刚-柔”耦合伸缩关节5
‑‑
球内天线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6‑‑
球内太阳帆7
‑‑
自动释放和锁定机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ8‑‑
灵巧臂9
‑‑
灵巧臂末端
具体实施方式
23.为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
24.如图1所示,为所述机器人整体结构内部示意图,此图是为了更好的展示机器人内部结构示意图,为变形过程示意图,需注意此状态下机器人处于不稳定状态。
25.如图2所示,为所述机器人在球形巡航模式下的示意图,机器人此时处于封闭状态,确保此状态下机器人内部与外界隔离,在机器人需要在此状态下静止时,可通过机器人内部的陀螺仪和加速度感测器驱动“刚-柔”耦合伸缩关节(4)的电机,使机器人保持动态平衡,在机器人需要在此状态下移动时,球形机器人通过超冗余操作臂作为球形移动状态的质心变化机构,通过“刚-柔”耦合伸缩关节(4)的同向转动,实现机器人的灵活平稳滚动。
26.如图3所示,为所述球形机器人在灵巧臂作业模式的示意图,球形机器人上的灵巧臂(8),可在球形巡航模式下,将球壳左右两端的灵巧臂末端(9),分别伸出作为支撑,将整个球体抬升,使整个机器人可视为两腿式机器人,机器人内部的陀螺仪和加速度感测器可驱动“刚-柔”耦合伸缩关节(4)的电机,使机器人保持动态平衡,通过灵巧臂(8)实现短距离步态行走,实现机器人的台阶式越障。
27.如图4所示,为所述球形机器人在双操作臂作业模式示意图,其变化过程是由球形巡航模式下机器人根据其他球形机器人的位置,基于预输入任务,确定操作基点后到达指定位置,由两端的灵巧臂(8)的灵巧臂末端(9)伸出,并支撑于地面,然后通过自动释放和锁定机构(7)完成球壳展开使球内太阳帆(6)开始工作,此时两个超冗余操作臂可依托超冗余操作臂基座(2)和灵巧臂末端(9)作为支撑,使左右两个超冗余操作臂,可在空间内实现对外大范围操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1