用于可转位马达化棘轮工具的内部双棘爪机构的制作方法
1.本发明总体上涉及可转位手持工具,更具体地,本发明涉及用于可转位棘轮工具的内部双棘爪机构。
背景技术:
2.动力手持工具(例如马达化棘轮扳手和传动器)通常用于汽车、工业和家庭应用中,以安装和去除螺纹紧固件,并且向工件(例如螺纹紧固件)施加扭矩和/或角位移。动力手持工具(例如无绳动力棘轮和传动器)通常包括容纳在壳体中的电动马达、以及其它部件(例如开关、发光二极管(light emitting diode,led)和电池)。壳体可以是掀盖式壳体,其通常包括两个或更多个壳体部,这些壳体部通过紧固件(例如螺钉或铆钉)联接在一起,以协同形成壳体。
3.动力手持工具(例如马达化棘轮扳手和传动器)包括由马达驱动的棘轮式头部。然而,该头部通常相对于工具主体固定。头部的固定性质可能使得难以到达位于狭小的或其它难以接近的位置的紧固件和其它工件。
4.为了更好地接近位于狭小或其它难以接近的位置的工件,常规的动力工具利用可相对于工具的壳体枢转的可转位棘轮头。这些常规的工具具有单内部棘爪或单外部棘爪棘轮机构。然而,这些棘爪棘轮机构具有相对低的扭矩施加能力和疲劳强度。这种低的极限扭矩输出使得具有这些类型的棘轮机构的动力工具难以以高的预置扭矩拧紧和松开工件。
5.其它常规的动力工具具有外部双棘爪机构。然而,由于由棘爪齿冲击棘轮齿轮齿引起的有限冲击能量,这些棘爪棘轮机构也具有相对低的扭矩输出,这使得具有这些类型的棘轮机构的动力工具难以以高预置扭矩拧紧和松开工件。而且,棘轮头被扩大,以容纳外部双棘爪机构所需的所有部件。
技术实现要素:
6.本发明广泛地涉及一种用于可转位棘轮工具(例如马达化棘轮式工具)的内部双棘爪机构。与常规可转位工具中的棘爪机构相比,本发明的内部双棘爪机构的极限扭矩和疲劳强度得到了提高。具体地,本发明的棘爪机构的极限扭矩输出大约是常规的单内部棘爪机构的极限扭矩输出的两倍。而且,与利用常规的单内部棘爪机构的棘轮相比,利用本发明的棘爪机构的棘轮头的尺寸略微增大,因此显著地小于容纳双棘爪外部棘爪机构的棘轮头。
7.在一实施例中,本发明广泛地涉及一种具有第一壳体部的工具。该工具广泛地包括:棘轮壳体部,其可枢转地联接到第一壳体部;轭架(yoke),其可旋转地布置在棘轮壳体部中;棘爪机构,其布置在棘轮壳体部中并且适于选择性地将轭架的旋转运动沿第一旋转方向和第二旋转方向中的一者传递到驱动凸起部。棘爪机构包括:棘爪托架,其可旋转地布置在棘轮壳体部中;第一棘爪和第二棘爪,其可枢转地联接到棘爪托架;以及选择器开关,其可旋转地联接到棘爪托架并且适于选择性地定位第一棘爪和第二棘爪,以将轭架的旋转
运动沿第一旋转方向和第二旋转方向中的一者传递到驱动凸起部。
8.在另一实施例中,本发明广泛地涉及一种用于可转位工具的棘爪机构,其适于选择性地将工具的轭架的旋转运动沿第一旋转方向和第二旋转方向中的一者传递到工具的驱动凸起部。棘爪机构包括:棘爪托架;第一棘爪和第二棘爪,其可枢转地联接到棘爪托架;以及选择器开关,其可旋转地联接到棘爪托架并且适于选择性地定位第一棘爪和第二棘爪,以将轭架的旋转运动沿第一旋转方向和第二旋转方向中的一者传递到驱动凸起部。
附图说明
9.为了便于理解寻求保护的主题,在附图中例示了其实施例,当结合以下描述考虑时,从对其实施例的检查中,寻求保护的主题、其构造和操作及其许多优点应当容易理解和领会。
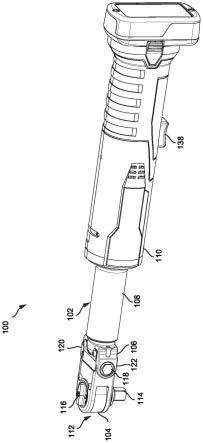
10.图1是结合了本发明实施例的示例性棘轮工具的透视侧视图。
11.图2是根据本发明实施例的图1的棘轮工具的棘轮壳体以及第一壳体部和第二壳体部的侧面透视图。
12.图3是根据本发明实施例的相对于图1的棘轮工具的第一壳体部和第二壳体部枢转的棘轮壳体的侧面透视图。
13.图4是根据本发明实施例的图2的棘轮工具的棘轮以及第一壳体部和第二壳体部的侧面透视分解拆卸图。
14.图5是根据本发明实施例的图1的棘轮工具的棘爪机构的侧面透视分解拆卸图。
15.图6是根据本发明实施例的图1的棘轮工具的棘爪机构的另一侧面透视分解拆卸图。
16.图7是根据本发明实施例的选择第一旋转驱动方向的图1的棘轮工具的棘爪机构的详细顶视图。
17.图8是根据本发明实施例的选择第二旋转驱动方向的图1的棘轮工具的棘爪机构的详细顶视图。
具体实施方式
18.尽管本发明容许有许多不同形式的实施例,但是在附图中示出了并且将在本文中详细描述本发明的实施例,包括优选实施例,应当理解,本发明应当被认为是本发明的原理的范例,并且不旨在将本发明的广泛方面限制于所例示的实施例。如本文所用的,术语“本发明”不旨在限制所要求保护的发明的范围,而是仅为了解释的目的而用于讨论本发明的示例性实施例的术语。
19.本发明广泛地涉及一种用于可转位棘轮工具(例如马达化棘轮式工具)的内部双棘爪机构。与可转位工具的常规棘爪机构相比,本发明的内部双棘爪机构的极限扭矩输出和疲劳强度得到了提高并且更大。具体地,本发明的棘爪机构的极限扭矩输出大约是常规的单内部棘爪机构的极限扭矩输出的两倍。而且,与利用常规的单内部棘爪机构的棘轮相比,利用本发明的棘爪机构的棘轮头的尺寸略微增大,并且仍然小于容纳双棘爪外部棘爪机构的棘轮头。
20.参考图1至图8,一种可转位工具100(例如,无绳棘轮式工具)包括工具壳体102,其
具有棘轮壳体部104、第一壳体部106、第二壳体部108、和马达壳体部110。如本文所讨论的,可转位工具100是棘轮式扳手。然而,本发明不限于此,并且工具100可以是任何类型的手持式工具,包括但不限于电动或气动工具,例如电钻、刳刨机、冲击扳手、棘轮扳手、螺丝传动器或其它动力工具。
21.棘轮壳体部104围封/容纳棘爪机构112,该棘爪机构112以下述方式将扭矩从工具100的马达传递到驱动凸起部114。驱动凸起部114适于经由联接到驱动凸起部114(例如双向棘轮方形或六边形驱动器)的适配器、钻头、或套筒来将扭矩施加到工件(例如紧固件)。如图例示的,驱动凸起部114是“阳”连接器,其设计为装配到或配套地接合阴配对件。然而,驱动凸起部114可以替代性地包括“阴”连接器,其设计为配套地接合阳配对件。驱动凸起部114也可结构化成直接接合工件而不需要联接到适配器、钻头或套筒。驱动凸起部114的旋转方向可以以下述方式通过选择器开关116的旋转而选择为第一旋转方向或第二旋转方向(例如顺时针或逆时针)。
22.棘轮壳体部104和第一壳体部106例如经由壳体枢轴销118可枢转地彼此联接。壳体枢轴销118可以是销、铆钉、螺纹紧固件或其它合适的紧固件,其提供棘轮壳体部104与第一壳体部106之间的可枢转联接。如图3例示的,可枢转联接允许棘轮壳体部104相对于枢轴销118的纵向轴线枢转,该纵向轴线大致垂直于工具100的纵向轴线,从而允许棘轮壳体部104相对于第一壳体部106、第二壳体部108和马达壳体部110枢转。
23.第一壳体部106包括第一臂118和第二臂120,其适于接收壳体枢轴销118,从而可枢转地联接棘轮壳体部104和第一壳体部106。在一实施例中,第一壳体部106螺纹地联接到第二壳体部108。在另一实施例中,第一壳体部106和第二壳体部是单个一体壳体。
24.第二壳体部108围封/容纳曲轴150,该曲轴150适于以公知的方式将棘爪机构112可操作地联接到马达。第二壳体部108适于使用附接特征联接到马达壳体110,该附接特征包括例如切口124和/或通道126。在一实施例中,附接特征在第二壳体部108螺纹联接到第一壳体部106之后机加工到第二壳体部108中,以确保棘轮壳体部104相对于马达壳体部110适当地定向。在一实施例中,第二壳体部108是具有不同长度和/或构造以容纳具有不同长度的曲轴的多个可互换的第二壳体部中的一者。在一实施例中,第二壳体部108是机加工件,从而允许以与铸件相比更低的成本和复杂性制造不同的长度和构造,这是因为不必制造或使用多个模具。
25.壳体盖板128经由例如紧固件130(例如铆钉、螺钉等)联接到第一壳体部106和第二壳体部108。壳体盖板128限制污染物渗入第一壳体部106和第二壳体部108的内部并潜在地损坏其中容纳的部件。
26.在一实施例中,棘轮壳体104通过锁止机构相对于第一壳体部106和第二壳体部108选择性地定位。在该实施例中,棘轮壳体104包括凹口132,其适于选择性地接合布置在第一壳体部106中的一个或多个锁止部134,例如锁止销或锁止球。(一个或多个)锁止部134经由偏置构件136(例如弹簧)朝向凹口132偏置。
27.例如,马达壳体部110围封或容纳电动或气动马达、开关组件、具有用于配置和设置工具的按钮的显示器、一个或多个状态指示器(例如发光二极管)、以及用于操作工具的其他部件中的一者或多者。马达壳体部110还可包括带纹理的或滚花的把手,以在使用期间改善使用者对工具100的抓握。在一实施例中,马达壳体部110包括以掀盖型方式联接在一
起的第一马达壳体部和第二马达壳体部。在一实施例中,马达壳体部110包括塑料或金属。
28.马达(未示出)适于经由曲轴150可操作地接合棘爪机构112,以向驱动凸起部114提供扭矩。在一实施例中,马达可以是无刷或刷式电动马达、气动马达、或者任何其它合适的马达。动力源(未示出)可以与工具100相关联,以向工具100提供动力以供操作(例如电力、液压或气动),以操作马达。在一实施例中,动力源可容纳在马达壳体部110的与棘轮壳体部104相对的端部、马达壳体部110的中间部分、或工具100/马达壳体部110的任何其它部分中。动力源还可以是外部部件,其不被工具100容纳,而是通过例如有线或无线装置可操作地联接到工具100。在一实施例中,动力源是可拆卸且可再充电的电池,该电池适于布置在马达壳体部110的端部中并且以公知的方式电联接到工具100的对应端子。
29.在一实施例中,工具100包括触发器138,其可以由使用者致动,以使工具100操作。例如,使用者可以向内压下触发器138,以选择性地从动力源汲取动力,并且使马达操作并沿所期望的旋转方向向驱动凸起部114提供扭矩。在不脱离本发明的精神和范围的情况下,可以实施任何合适的触发器138或开关。例如,触发器138还可被偏置,使得触发器138可相对于工具100向内压下,以使工具100操作,并且释放触发器138使触发器138相对于工具100向外移动,以经由触发器138的偏置性质停止工具100的操作。触发器132和开关机构也可以是变速型机构。在这方面,触发器138被压下得越远,触发器138的致动或压下导致马达以越快的速度操作。
30.轭架140可旋转地布置在棘轮壳体部104中。轭架140包括布置在轭架140的内周上的轮齿142。轭架还包括凹部144,其适于经由第一驱动构件146和第二驱动构件148可操作地联接到曲轴150,如下所述。
31.第一驱动构件146例如通过第一衬套152可旋转地联接到轭架140的凹部144,并且可滑动地联接到壳体枢轴销118。第二驱动构件148也可滑动地联接到壳体枢轴销118,并且包括两个臂,其布置在第一驱动构件的任一侧上,使得第一驱动构件146和第二驱动构件148同时沿着壳体枢轴销118移动。第二驱动构件148还经由第二衬套154可旋转地联接到曲轴150。因此,由马达的操作引起的曲轴150的旋转运动驱动第一驱动构件146和第二驱动构件148沿着壳体枢轴销118进行往复线性运动。第一驱动构件148的往复线性运动被传递到轭架140,使得轭架140在棘轮壳体部104中来回重复地旋转。轭架140的旋转运动经由棘爪机构112沿第一旋转方向和第二旋转方向中的一者传递至驱动凸起部114,如下所述。
32.棘爪机构112可旋转地布置在棘轮壳体部104中。棘爪机构112包括选择器开关116、棘爪托架156以及第一棘爪158和第二棘爪160。棘爪机构112将轭架140的旋转运动沿选定的第一旋转方向和第二旋转方向中的一者传递至驱动凸起部114。
33.选择器开关116可旋转地联接到棘爪托架156,并且适于选择性地定位第一棘爪158和第二棘爪160,以将轭架140的旋转运动沿第一旋转方向和第二旋转方向中的任一者传递到驱动凸起部114。选择器开关116可以是杆或旋钮。选择器开关116包括第一选择器开关孔口162和第二选择器开关孔口164以及分别接收在第一选择器开关孔口162和第二选择器开关孔口164中的第一向外偏置构件166和第二向外偏置构件168。第一向外偏置构件166和第二向外偏置构件168使用例如弹簧分别朝向第一棘爪158和第二棘爪160偏置。在一实施例中,选择器开关116具有润滑脂配件186,其适于允许将润滑脂施加到棘爪机构部件以便继续维护和使用。
34.棘爪托架156可旋转地布置在棘轮壳体部104中。在一实施例中,棘爪托架156与驱动凸起部114成一体。然而,本发明不限于此,并且棘爪托架156和驱动凸起部114可以是联接在一起的单独部件。棘爪托架156包括棘爪定位构件孔口170,其适于相应地接收可滑动地布置在其中的棘爪定位构件172。在一实施例中,棘爪定位构件172是销。棘爪托架156还包括适于相应地接收枢轴构件176的枢轴构件孔口174。在一实施例中,枢轴构件176是销。
35.第一棘爪158经由枢轴构件176中的一个来可枢转地联接到棘爪托架156。第一棘爪158包括第一齿178和第二齿180,其适于基于选择器开关116的选定位置选择性地接合轭架的轮齿142。例如,当选择器开关116布置在选择第一旋转方向(例如,顺时针方向)的位置时,第一齿178接合轮齿142。类似地,当选择器开关116布置在选择第二旋转方向(例如,逆时针方向)的位置时,第二齿180接合轮齿142。
36.第二棘爪162经由枢轴构件176中的另一个来可枢转地联接到棘爪托架156。第二棘爪162包括第一齿182和第二齿184,其适于基于选择器开关116的位置选择性地接合轭架的轮齿142。例如,当选择器开关116布置在选择第一旋转方向(例如,顺时针方向)的位置时,第一齿182接合轮齿142。类似地,当选择器开关116布置在选择第二旋转方向(例如,逆时针方向)的位置时,第二齿184接合轮齿142。在一实施例中,第一棘爪158和第二棘爪160大致相同。第一棘爪158和第二棘爪160适于经由棘爪定位构件176围绕相应的枢轴构件172大致同时枢转。
37.如图7例示的,当选择器开关116移动到选择第一旋转方向(例如顺时针方向)的位置时,第一向外偏置构件166和第二向外偏置构件168分别接合第一棘爪158和第二棘爪160,以使第一棘爪158和第二棘爪160围绕相应的枢轴构件170枢转,使得第一棘爪158的第一齿178和第二棘爪160的第一齿182接合轭架140的轮齿142。
38.如图8例示的,当选择器开关116移动到选择第二旋转方向(例如逆时针方向)的位置时,第一向外偏置构件166和第二向外偏置构件168分别接合第一棘爪158和第二棘爪160,以使第一棘爪158和第二棘爪160围绕相应的枢轴构件170枢转,使得第一棘爪158的第二齿180和第二棘爪160的第二齿184接合轭架140的轮齿142。
39.如本文所用的,术语“联接”及其功能等同物并不旨在必须限于两个或更多部件的直接机械联接。相反,术语“联接”及其功能等同物旨在意指两个或更多个物体、特征、工件和/或环境物质之间的任何直接或间接的机械、电气或化学连接。在一些示例中,“联接”还旨在意指一个物体与另一物体成一体。如本文所用的,术语“一”或“一个”可以包括一个或多个项,除非另有具体说明。
40.在上述说明书和附图中阐述的内容仅作为例示而不是作为限制来提供。尽管已经示出和描述了特定实施例,但是对于本领域技术人员而言将显而易见的是,在不脱离发明人贡献的更广泛方面的情况下可以进行改变和修改。当基于现有技术以适当的观点来看时,所寻求保护的实际范围旨在由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1