铰链组件及具有其的制冷装置的制作方法
1.本发明涉及家电技术领域,尤其涉及一种铰链组件及具有其的制冷装置。
背景技术:
2.通常情况下,冰箱和门体之间都是通过一个固定的铰链件来实现相对运动,门体的开闭自由度会大大受限,即无法自由控制门体运动轨迹以适应不同的应用场景。
3.例如,从最近几年来看,随着社会的进步,人们生活水平的提高,对冰箱在家庭的摆放位置与摆放方式越来越被普通用户看重,而针对目前的家装风格,部分家庭追求风格一体化,就需要把冰箱放入橱柜中,构成所谓的嵌入式冰箱装置,所述冰箱称为嵌入式冰箱,目前的冰箱难以适应这种嵌入式应用场景。
4.有鉴于此,有必要对现有的冰箱予以改进,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种铰链组件及具有其的制冷装置,其可以有效提高门体开闭自由度。
6.为实现上述发明目的之一,本发明一实施方式提供一种铰链组件,用于连接箱体和门体,所述箱体包括容纳腔室及连接铰链组件的枢转侧,所述铰链组件包括连接所述箱体的第一铰链件、连接所述门体的第二铰链件以及连接所述第一铰链件及所述第二铰链件的切换组件,当所述门体处于开启过程中时,所述第二铰链件相对所述切换组件静止且所述切换组件相对所述第一铰链件运动,而后所述第一铰链件相对所述切换组件静止且所述第二铰链件相对所述切换组件运动,其中,所述铰链组件先驱动所述门体相对所述箱体原地转动,再驱动所述门体由枢转侧朝向容纳腔室移动,再驱动所述门体由容纳腔室朝向枢转侧移动,而后再驱动所述门体相对所述箱体继续原地转动。
7.作为本发明一实施方式的进一步改进,所述箱体包括开口及环绕所述开口设置的前端面,当所述切换组件绕第一旋转轴相对所述第一铰链件转动时,所述第一旋转轴与所述前端面之间具有第一距离,当所述第二铰链件绕第二旋转轴相对所述切换组件转动时,所述第二旋转轴与所述前端面之间具有第二距离,所述第二距离大于所述第一距离。
8.作为本发明一实施方式的进一步改进,当所述切换组件绕第一旋转轴相对所述第一铰链件转动时,所述第一旋转轴与所述外侧面之间具有第三距离,当所述第二铰链件绕第二旋转轴相对所述切换组件转动时,所述第二旋转轴与所述外侧面之间具有第四距离,所述第四距离小于所述第三距离。
9.作为本发明一实施方式的进一步改进,所述第一铰链件固定于所述箱体,所述第二铰链件固定于所述门体,所述切换组件包括第一配合件及第二配合件,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一铰链件与所述第一配合件相对运动而驱动所述门体相对所述箱体原地转动,而后所述第一铰链件与所述第一配合件相对运动而驱动所述门体由枢转侧朝向容纳腔室移动,而后所述第一铰链件与所述第一配合件相对
运动而驱动所述门体由容纳腔室朝向枢转侧移动,且所述第二配合件限位所述第二铰链件,当所述门体处于由第一开启角度继续开启至第二开启角度的过程中时,所述第二铰链件脱离所述第二配合件的限位,且所述第一配合件限位所述第一铰链件,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第二铰链件与所述第二配合件相对运动而驱动所述门体继续原地转动。
10.作为本发明一实施方式的进一步改进,所述第一铰链件固定于所述箱体,所述第二铰链件固定于所述门体,所述切换组件包括第一配合件及第二配合件,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一铰链件与所述第一配合件相对运动而驱动所述门体相对所述箱体原地转动,而后所述第一铰链件与所述第一配合件相对运动而驱动所述门体由枢转侧朝向容纳腔室移动,且所述第二配合件限位所述第二铰链件,当所述门体处于由第一开启角度继续开启至第二开启角度的过程中时,所述第二铰链件脱离所述第二配合件的限位,且所述第一配合件限位所述第一铰链件,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第二铰链件与所述第二配合件相对运动而驱动所述门体由容纳腔室朝向枢转侧移动,而后所述第二铰链件与所述第二配合件相对运动而驱动所述门体继续原地转动。
11.作为本发明一实施方式的进一步改进,所述第一铰链件固定于所述箱体,所述第二铰链件固定于所述门体,所述切换组件包括第一配合件及第二配合件,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一铰链件与所述第一配合件相对运动而驱动所述门体相对所述箱体原地转动,且所述第二配合件限位所述第二铰链件,当所述门体处于由第一开启角度继续开启至第二开启角度的过程中时,所述第二铰链件脱离所述第二配合件的限位,且所述第一配合件限位所述第一铰链件,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第二铰链件与所述第二配合件相对运动而驱动所述门体由枢转侧朝向容纳腔室移动,而后所述第二铰链件与所述第二配合件相对运动而驱动所述门体由容纳腔室朝向枢转侧移动,而后所述第二铰链件与所述第二配合件相对运动而驱动所述门体继续原地转动。
12.作为本发明一实施方式的进一步改进,所述切换组件包括第一切换件及第二切换件,当所述门体处于由关闭状态开启至第一开启角度的过程中或是处于由第二开启角度继续开启至最大开启角度的过程中时,所述第一切换件与所述第二切换件相对静止,当所述门体处于由第一开启角度继续开启至第二开启角度的过程中时,所述第一切换件相对所述第二切换件运动而使得所述第二铰链件脱离所述第二配合件的限位,且所述第一配合件限位所述第一铰链件。
13.作为本发明一实施方式的进一步改进,所述第一铰链件与所述切换组件之间通过相互配合的第一轴体组及第一槽体组实现相对运动,所述第二铰链件与所述切换组件之间通过相互配合的第二轴体组及第二槽体组实现相对运动,所述第一轴体组包括第一轴体及第二轴体,所述第一槽体组包括与所述第一轴体配合的第一槽体及与所述第二轴体配合的第二槽体,所述第二轴体组包括第三轴体及第四轴体,所述第二槽体组包括与所述第三轴体配合的第三槽体及与所述第四轴体配合的第四槽体。
14.作为本发明一实施方式的进一步改进,所述第一铰链件包括所述第一轴体及所述第二轴体,所述第一配合件包括所述第一槽体及所述第二槽体,所述第二配合件包括所述
第三轴体及所述第四轴体,所述第二铰链件包括所述第三槽体及所述第四槽体。
15.作为本发明一实施方式的进一步改进,所述第一槽体包括位于所述第一切换件的第一上槽体及位于所述第二切换件的第一下槽体,所述第一上槽体包括第一上自由段,所述第一下槽体包括第一下自由段,所述第二槽体包括位于所述第一切换件的第二上槽体及位于所述第二切换件的第二下槽体,所述第二上槽体包括第二上自由段,所述第二下槽体包括第二下自由段,所述第三槽体包括第三自由段,所述第四槽体包括第四自由段,所述第一槽体组包括锁止段,所述第二槽体组包括限位段,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一切换件与所述第二切换件相对静止,所述第一上自由段与所述第一下自由段重合形成第一自由段,所述第二上自由段与所述第二下自由段重合形成第二自由段,所述第一轴体于所述第一自由段运动,所述第二轴体于所述第二自由段运动,所述第三轴体和/或所述第四轴体限位于所述限位段而使得所述切换组件限位所述第二铰链件,当所述门体处于由第一开启角度继续开启至第二开启角度的过程中时,所述第一切换件及所述第二切换件相对运动而使得所述第四轴体脱离所述限位段,且所述第一轴体和/或所述第二轴体限位于所述锁止段而使得所述切换组件限位所述第一铰链件,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第三轴体于所述第三自由段内运动,所述第四轴体于所述第四自由段运动。
16.作为本发明一实施方式的进一步改进,所述第一自由段包括相对设置的初始位置及停止位置,所述第二自由段包括依次相连的第一段、第二段及第三段,当所述门体处于关闭状态时,所述第一轴体位于所述初始位置,所述第二轴体位于所述第一段远离所述第二段的一端,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一轴体于所述初始位置原地转动,所述第二轴体以所述第一轴体为圆心而于所述第一段内运动,而后所述第二轴体于所述第二段内运动而带动所述第一轴体由所述初始位置运动至所述停止位置,所述门体由枢转侧朝向容纳腔室移动,而后所述第二轴体于所述第三段内运动而带动所述第一轴体由所述停止位置朝向所述初始位置运动,所述门体由容纳腔室朝向枢转侧移动,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第三轴体于所述第三自由段内原地转动,所述第四轴体以所述第三轴体为圆心而于所述第四自由段运动。
17.作为本发明一实施方式的进一步改进,所述第一自由段包括相对设置的初始位置及停止位置,所述第二自由段包括相连的第一段及第二段,所述第三自由段包括相对设置的起始位置及枢转位置,所述第四自由段包括相连的移动段及转动段,当所述门体处于关闭状态时,所述第一轴体位于所述初始位置,所述第二轴体位于所述第一段远离所述第二段的一端,所述第三轴体位于所述起始位置,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一轴体于所述初始位置原地转动,所述第二轴体以所述第一轴体为圆心而于所述第一段内运动,而后所述第二轴体于所述第二段内运动而带动所述第一轴体由所述初始位置运动至所述停止位置,所述门体由枢转侧朝向容纳腔室移动,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第四轴体于所述移动段内运动而带动所述第三轴体由所述起始位置运动至所述枢转位置,所述门体由容纳腔室朝向枢转侧移动,而后所述第三轴体于所述枢转位置原地转动,所述第四轴体以所述第三轴体为圆心而于所述转动段运动。
18.作为本发明一实施方式的进一步改进,所述第三自由段包括相对设置的起始位置及枢转位置,所述第四自由段包括依次相连的第一移动段、第二移动段及转动段,当所述门体处于关闭状态时,所述第二轴体位于所述第二自由段的一端,所述第三轴体位于所述起始位置,当所述门体处于由关闭状态开启至第一开启角度的过程中时,所述第一轴体于所述起始位置原地转动,所述第二轴体以所述第一轴体为圆心而于所述第二自由段内运动,当所述门体处于由第二开启角度继续开启至最大开启角度的过程中时,所述第四轴体于所述第一移动段内运动而带动所述第三轴体由所述起始位置运动至所述枢转位置,所述门体由枢转侧朝向容纳腔室移动,而后所述第四轴体于所述第二移动段内运动而带动所述第三轴体由所述枢转位置朝向所述起始位置移动,所述门体由容纳腔室朝向枢转侧移动,而后所述第三轴体于所述起始位置原地转动,所述第四轴体以所述第三轴体为圆心而于所述转动段运动。
19.为实现上述发明目的之一,本发明一实施方式提供一种制冷装置,包括箱体、门体及连接所述箱体及所述门体的铰链组件,所述铰链组件为如上任意一项技术方案所述的铰链组件。
20.与现有技术相比,本发明的有益效果在于:本发明的铰链组件可提高门体开闭的自由度,且可产生多种运动轨迹以适应不同的应用场景。
附图说明
21.图1是本发明一实施方式的多门冰箱立体图;
22.图2是本发明一实施方式的多门冰箱处于关闭状态的示意图;
23.图3是本发明一实施方式的多门冰箱开启至第一中间开启角度的示意图;
24.图4是本发明一实施方式的多门冰箱后视图(省略部分元件);
25.图5是本发明一实施方式的第一配合部、第二配合部爆炸图;
26.图6是本发明一实施方式的铰链组件处于关闭状态的第一视角立体图;
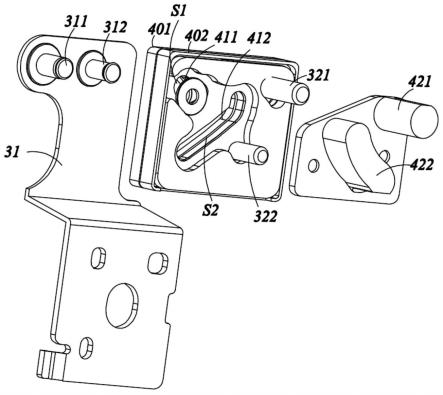
27.图7至图9是本发明一实施方式的铰链组件第一视角不同状态爆炸图;
28.图10是本发明一实施方式的铰链组件处于关闭状态的第二视角立体图;
29.图11至图13是本发明一实施方式的铰链组件第二视角不同状态爆炸图;
30.图14是本发明一实施方式的冰箱处于闭合状态的俯视图;
31.图15是本发明一实施方式的铰链组件处于闭合状态的立体图;
32.图16是本发明一实施方式的铰链组件处于闭合状态的俯视剖视图;
33.图17是本发明一实施方式的铰链组件处于闭合状态的仰视剖视图;
34.图18是本发明一实施方式的冰箱处于第一中间开启角度的俯视图;
35.图19是本发明一实施方式的铰链组件处于第一中间开启角度的立体图;
36.图20是本发明一实施方式的铰链组件处于第一中间开启角度的俯视剖视图;
37.图21是本发明一实施方式的铰链组件处于第一中间开启角度的仰视剖视图;
38.图22是本发明一实施方式的冰箱处于第二中间开启角度的俯视图;
39.图23是本发明一实施方式的铰链组件处于第二中间开启角度的立体图;
40.图24是本发明一实施方式的铰链组件处于第二中间开启角度的俯视剖视图;
41.图25是本发明一实施方式的铰链组件处于第二中间开启角度的仰视剖视图;
42.图26是本发明一实施方式的冰箱处于第一开启角度的俯视图;
43.图27是本发明一实施方式的铰链组件处于第一开启角度的立体图;
44.图28是本发明一实施方式的铰链组件处于第一开启角度的俯视剖视图;
45.图29是本发明一实施方式的铰链组件处于第一开启角度的仰视剖视图;
46.图30是本发明一实施方式的冰箱处于第二开启角度的俯视图;
47.图31是本发明一实施方式的铰链组件处于第二开启角度的立体图;
48.图32是本发明一实施方式的铰链组件处于第二开启角度的俯视剖视图;
49.图33是本发明一实施方式的铰链组件处于第二开启角度的仰视剖视图;
50.图34是本发明一实施方式的冰箱处于最大开启角度的俯视图;
51.图35是本发明一实施方式的铰链组件处于最大开启角度的立体图;
52.图36是本发明一实施方式的铰链组件处于最大开启角度的俯视剖视图;
53.图37是本发明一实施方式的铰链组件处于最大开启角度的仰视剖视图;
54.图38是本发明一实施方式的冰箱全嵌入状态的示意图;
55.图39是本发明一实施方式的门体下方的铰链组件立体图;
56.图40是本发明一实施方式的门体下方的铰链组件爆炸图;
57.图41是本发明一实施方式的带有走线模块的冰箱立体图;
58.图42是本发明一实施方式的带有走线模块的冰箱俯视图;
59.图43是本发明一实施方式的带有走线模块的冰箱立体状态下局部放大图;
60.图44是本发明一实施方式的带有走线模块的冰箱俯视状态下局部放大图(对应门体闭合状态);
61.图45是本发明一实施方式的带有走线模块的冰箱俯视状态下局部放大图(对应门体开启状态)。
具体实施方式
62.以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
63.在本发明的各个图示中,为了便于图示,结构或部分的某些尺寸会相对于其它结构或部分夸大,因此,仅用于图示本发明的主题的基本结构。
64.另外,本文使用的例如“上”、“上方”、“下”、“下方”、“左”、“右”等表示空间相对位置的术语是出于便于说明的目的来描述如附图中所示的一个单元或特征相对于另一个单元或特征的关系。空间相对位置的术语可以旨在包括设备在使用或工作中除了图中所示方位以外的不同方位。例如,如果将图中的设备翻转,则被描述为位于其他单元或特征“下方”或“之下”的单元将位于其他单元或特征“上方”。因此,示例性术语“下方”可以囊括上方和下方这两种方位。设备可以以其他方式被定向(旋转90度或其他朝向),并相应地解释本文使用的与空间相关的描述语。
65.在本实施方式中,结合图1至图13,冰箱100包括箱体10、用以打开和关闭箱体10的门体20以及连接箱体10及门体20的铰链组件30。
66.箱体10包括容纳腔室s及连接铰链组件30的枢转侧p。
67.铰链组件30包括第一铰链件31、第二铰链件32以及连接第一铰链件31及第二铰链件32的切换组件40。
68.当门体20处于开启过程中时,第一铰链件31先相对切换组件40运动,而后第二铰链件32相对切换组件40运动,其中,铰链组件30先驱动门体20相对箱体10原地转动,再驱动门体20由枢转侧p朝向容纳腔室s移动,再驱动门体20由容纳腔室s朝向枢转侧p移动,而后再驱动门体20相对箱体10继续原地转动。
69.这里,通过门体20相对箱体10原地转动可有效避免因门体20某个方向的位移而导致门体20无法正常开启,通过门体20由枢转侧p朝向容纳腔室s移动可避免门体20在打开过程中与周边的橱柜或墙体等产生干涉,适用于嵌入式橱柜或容纳冰箱100的空间较小的场景,通过门体20由容纳腔室s朝向枢转侧p移动可使得门体20尽量远离箱体10,保证箱体10的开度,避免箱体10内的抽屉、搁物架等受门体20干涉而无法打开的问题,而通过门体20相对箱体10继续转动可进一步提高门体的最大开启角度。
70.另外,本实施方式通过切换组件33可实现第一铰链件31与第二铰链件32之间的切换工作,第一铰链件31及第二铰链件32分别可实现原地转动、由枢转侧p朝向容纳腔室s移动、由容纳腔室s朝向枢转侧p移动及继续原地转动中的部分功能,且在本实施方式中,原地转动、由枢转侧p朝向容纳腔室s移动、由容纳腔室s朝向枢转侧p移动及继续原地转动是依序逐个完成的。
71.在本实施方式中,第一铰链件31固定于箱体10,第二铰链件32固定于门体20,切换组件40包括第一配合件41及第二配合件42,第一铰链件31与第二铰链件32有多种组合方式。
72.在第一种组合方式中,当门体20处于由关闭状态开启至第一开启角度α1的过程中时,第一铰链件31与第一配合件41相对运动而驱动门体20相对箱体10原地转动,而后第一铰链件31与第一配合件41相对运动而驱动门体20由枢转侧p朝向容纳腔室s移动,而后第一铰链件31与第一配合件41相对运动而驱动门体20由容纳腔室s朝向枢转侧p移动,且第二配合件42限位第二铰链件32,当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时,第二铰链件32脱离第二配合件42的限位,且第一配合件41限位第一铰链件31,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第二铰链件32与第二配合件42相对运动而驱动门体20继续原地转动。
73.也就是说,本示例的第一铰链件31与第一配合件41配合而依次实现门体20原地转动、门体20由枢转侧p朝向容纳腔室s移动及门体20由容纳腔室s朝向枢转侧p移动,第二铰链件32与第二配合件42配合而实现门体20继续原地转动,其中,切换组件40通过锁止解锁功能可实现第一铰链件31先工作,第二铰链件32后工作。
74.在第二种组合方式中,当门体20处于由关闭状态开启至第一开启角度α1的过程中时,第一铰链件31与第一配合件41相对运动而驱动门体20相对箱体10原地转动,而后第一铰链件31与第一配合件41相对运动而驱动门体20由枢转侧p朝向容纳腔室s移动,且第二配合件42限位第二铰链件32,当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时,第二铰链件32脱离第二配合件42的限位,且第一配合件41限位第一铰链件31,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第二铰链件32与第二配合件42相对运动而驱动门体20由容纳腔室s朝向枢转侧p移动,而后第二铰链件32与第
二配合件42相对运动而驱动门体20继续原地转动。
75.也就是说,本示例的第一铰链件31与第一配合件41配合而依次实现门体20原地转动及门体20由枢转侧p朝向容纳腔室s移动,第二铰链件32与第二配合件42配合而依次实现门体20由容纳腔室s朝向枢转侧p移动及门体20继续原地转动,其中,切换组件40通过锁止解锁功能可实现第一铰链件31先工作,第二铰链件32后工作。
76.在第三种组合方式中,当门体20处于由关闭状态开启至第一开启角度α1的过程中时,第一铰链件31与第一配合件41相对运动而驱动门体20相对箱体10原地转动,且第二配合件42限位第二铰链件32,当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时,第二铰链件32脱离第二配合件42的限位,且第一配合件41限位第一铰链件31,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第二铰链件32与第二配合件42相对运动而驱动门体20由枢转侧p朝向容纳腔室s移动,而后第二铰链件32与第二配合件42相对运动而驱动门体20由容纳腔室s朝向枢转侧p移动,而后第二铰链件32与第二配合件42相对运动而驱动门体20继续原地转动。
77.也就是说,本示例的第一铰链件31与第一配合件41配合而实现门体20原地转动,第二铰链件32与第二配合件42配合而依次实现门体20由枢转侧p朝向容纳腔室s移动、门体20由容纳腔室s朝向枢转侧p移动及门体20继续原地转动,其中,切换组件40通过锁止解锁功能可实现第一铰链件31先工作,第二铰链件32后工作。
78.下面,以第一种组合方式为例具体说明本实施方式的冰箱100,且冰箱100以多门冰箱100为例。
79.结合图1至图5,冰箱100包括箱体10、用以打开和关闭箱体10的门体20以及连接箱体10及门体20的铰链组件30。
80.需要强调的是,本实施方式的结构不仅适用于带有铰链组件30的多门冰箱100,也可适用于其他场景,例如橱柜、酒柜、衣柜等等,本发明以多门冰箱100为例作说明,但不以此为限。
81.箱体10包括容纳腔室s及连接铰链组件30的枢转侧p。
82.这里,“枢转侧p”定义为门体20相对箱体10转动的区域,即设置有铰链组件30的区域,枢转侧p朝向容纳腔室s的方向定义为第一方向x,容纳腔室s朝向枢转侧p的方向定义为第二方向y。
83.具体的,当冰箱100左右两侧均设有铰链组件30时,箱体10包括左侧枢转侧p1及右侧枢转侧p2,当枢转侧p为左侧枢转侧p1时,第一方向x为从左至右的方向,第二方向y为从右至左的方向,当枢转侧p为右侧枢转侧p2时,第一方向x为从右至左的方向,第二方向y为从左至右的方向,也就是说,对应不同的枢转侧p,第一方向x与第二方向y的实际方向是不同的,后续说明以枢转侧p为左侧枢转侧p1为例。
84.门体20上设有第一配合部25,箱体10上设有第二配合部12。
85.结合图6至图13,铰链组件30包括固定于箱体10的第一铰链件31、固定于门体20的第二铰链件32以及连接第一铰链件31及第二铰链件32的切换组件40。
86.第一铰链件31与切换组件40之间通过相互配合的第一轴体组311、312及第一槽体组411、412实现相对运动,第一轴体组311、312包括第一轴体311及第二轴体312,第一槽体组411、412包括第一自由段s1、第二自由段s2及锁止段4132、4142、4152、4162,第一自由段
s1包括相对设置的初始位置a1及停止位置a2,第二自由段s2包括依次相连的第一段l1、第二段l2及第三段l3。
87.第二铰链件32与切换组件40之间通过相互配合的第二轴体组321、322及第二槽体组421、422实现相对运动,第二轴体组321、322包括第三轴体321及第四轴体322,第二槽体组421、422包括第三自由段421、第四自由段4221及限位段4222。
88.当门体20处于关闭状态时(可参考图14至图17),第一轴体311位于初始位置a1,第二轴体312位于第一段l1远离第二段l2的一端,且第四轴体322位于限位段4222而使得切换组件40限位第二铰链件32,第一配合部25与第二配合部12相互卡合。
89.这里,第一配合部25与第二配合部12相互卡合可实现门体20与箱体10的闭合,第一配合部25与第二配合部12的具体形式可以根据实际情况而定。
90.当门体20处于由关闭状态开启至第一开启角度α1的过程中时(可参考图18至图29),第一轴体311于初始位置a1原地转动,第二轴体312以第一轴体311为圆心而于第一段l1内运动,第一配合部25脱离第二配合部12,门体20相对箱体10原地转动,而后第二轴体312于第二段l2内运动而带动第一轴体311由初始位置a1运动至停止位置a2,门体20由枢转侧p朝向容纳腔室s移动,而后第二轴体312于第三段l3内运动而带动第一轴体311由停止位置a2朝向初始位置a1运动,门体20由容纳腔室s朝向枢转侧p移动。
91.具体的,当门体20处于由关闭状态开启至第一中间开启角度α11的过程中时(可参考图18至图21),第一轴体311于初始位置a1原地转动,第二轴体312以第一轴体311为圆心而于第一段l1内运动,门体20相对箱体10原地转动,第一配合部25脱离第二配合部12。
92.这里,当门体20处于由关闭状态开启至第一中间开启角度α11的过程中时,门体20相对箱体10原地转动,即门体20仅转动而不产生其他方向的位移,可以有效避免因门体20某个方向的位移而导致第一配合部25无法脱离第二配合部12的现象。
93.需要说明的是,本实施方式中的冰箱100可以是具有第一配合部25及第二配合部12的单门冰箱,或者是具有第一配合部25及第二配合部12的对开门冰箱、多门冰箱等等。
94.当门体20处于由第一中间开启角度α11开启至第二中间开启角度α12的过程中时(可参考图22至图25),第二轴体312于第二段l2内运动而带动第一轴体311由初始位置a1运动至停止位置a2,门体20由枢转侧p朝向容纳腔室s移动。
95.这里,当门体20处于由第一中间开启角度α11继续开启至第二中间开启角度α12的过程中时,门体20朝向容纳腔室s的一侧移动,即此时门体20既相对箱体10发生转动又相对箱体10沿第一方向x产生了位移,如此,门体20在转动过程中朝远离容纳腔室s的一侧凸伸出箱体10的距离会大大减小,即门体20沿第一方向x产生的位移抵消了门体20转动过程中沿第二方向y凸伸出箱体10的部分,从而避免门体20在打开过程中与周边的橱柜或墙体等产生干涉,适用于嵌入式橱柜或容纳冰箱100的空间较小的场景。
96.当门体20处于由第二中间开启角度α12开启至第一开启角度α1的过程中时(可参考图26至图29),第二轴体312于第三段l3内运动而带动第一轴体311由停止位置a2朝向初始位置a1运动,门体20由容纳腔室s朝向枢转侧p移动。
97.这里,当门体20处于由第二中间开启角度α12开启至第一开启角度α1的过程中时,门体20朝向枢转侧p的一侧移动,即此时门体20既相对箱体10发生转动又相对箱体10沿第二方向y产生了位移,如此,可使得门体20尽量远离箱体10,保证箱体10的开度,避免箱体10
内的抽屉、搁物架等受门体20干涉而无法打开的问题。
98.当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时(可参考图30至图33),第四轴体322脱离限位段4222,且第一轴体311和/或第二轴体312限位于锁止段4132、4142、4152、4162而使得切换组件40限位第一铰链件31。
99.当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时(可参考图34至图37),第三轴体321于第三自由段421内原地转动,第四轴体322以第三轴体321为圆心而于第四自由段4221运动,门体20相对箱体10继续原地转动。
100.在本实施方式中,门体20包括枢轴连接箱体10且沿水平方向并排设置的第一门体206及第二门体207。
101.冰箱100还包括活动连接于第一门体206靠近第二门体207一侧的竖梁80,第一配合部25设置于竖梁80处。
102.这里,竖梁80活动连接于第一门体206的右侧,竖梁80与第一门体206之间可通过复位弹簧81连接,竖梁80以竖直方向的轴线为中心相对第一门体206转动,换句话说,竖梁80可通过复位弹簧81作用而相对第一门体206转动并保持在一预定位置。
103.第一配合部25为向上凸伸出竖梁80的凸块25。
104.第二配合部12固设于箱体10上,例如,第二配合部12为基座104上的凹槽12,基座104固设于容纳腔室s顶部,凹槽12的一端具有缺口121,缺口121的开口方向朝前,凸块25及凹槽12均呈弧状,凸块25通过缺口121进入或脱离凹槽12以实现凸块25与凹槽12的相互限位及相互分离。
105.当然,可以理解的,第一配合部25、第二配合部12的具体结构不以上述说明为限,即第一配合部25不限定为竖梁80处的凸块25,第二配合部12不限定为与凸块25配合的凹槽12,第一配合部25及第二配合部12可以是冰箱100其他区域相互配合的结构。
106.在本实施方式中,门体20还包括枢轴连接箱体10且沿水平方向并排设置的第三门体208及第四门体209,第三门体208位于第一门体206的下方,且第四门体209位于第二门体207的下方,冰箱100还包括位于第三门体208及第四门体209下方的抽屉300。
107.这里,第一门体206及第二门体207对应的容纳腔室s为冷藏室,即冷藏室为对开门结构;第三门体208及第四门体209分别对应独立的两个变温间室;抽屉300为冷冻抽屉。
108.需要说明的是,冰箱100包括固定于箱体10内部且用于分隔两个变温间室的固定梁,第三门体208及第四门体209可与固定梁配合而实现密封,也就是说,此时第三门体208及第四门体209处无需再设置竖梁。
109.继续结合图1至图13,第一铰链件31包括第一轴体311及第二轴体322,切换组件40包括具有第一自由段s1的第一槽体411、具有第二自由段s2的第二槽体412、第三轴体321及第四轴体322,第二铰链件32包括具有第三自由段421的第三槽体421及具有第四自由段4221的第四槽体422。
110.切换组件40包括相互配合的第一切换件401及第二切换件402。
111.第一槽体411包括位于第一切换件401的第一上槽体413及位于第二切换件402的第一下槽体414,第一自由段s1包括位于第一上槽体413的第一上自由段4131及位于第一下槽体414的第一下自由段4141。
112.第二槽体412包括位于第一切换件401的第二上槽体415及位于第二切换件402的
第二下槽体416,第二自由段s2包括位于第二上槽体415的第二上自由段4151及位于第二下槽体416的第二下自由段4161。
113.锁止段4132、4142、4152、4162包括连通第一上自由段4131的第一上锁止段4132、连通第一下自由段4141的第一下锁止段4142、连通第二上自由段4151的第二上锁止段4152及连通第二下自由段4161的第二下锁止段4162。
114.第一上锁止段4132与第一下锁止段4142始终相互错开,第二上锁止段4152与第二下锁止段4162始终相互错开。
115.这里,“始终相互错开”是指在门体20开启过程中,第一上锁止段4132与第一下锁止段4142不会出现完全重合的状态,第二上锁止段4152与第二下锁止段4162也不会出现完全重合的状态。
116.在本实施方式中,第一切换件401相较于第二切换件402靠近第一铰链件31,即第一铰链件31、第一切换件401、第二切换件402及第二铰链件32之间依次叠置。
117.结合图9及图13,铰链组件30还包括第一铆接片4111及第二铆接片4121,当第一轴体311延伸至第一槽体411中时,第一铆接片4111位于第二切换件402的下方并套接第一轴体311,如此可避免第一轴体311脱离第一槽体411,同样的,当第二轴体312延伸至第二槽体412中时,第二铆接片4121位于第二切换件402的下方并套接第二轴体312,如此可避免第二轴体312脱离第二槽体412。
118.第一切换件401及第二切换件402通过第五轴体50相互配接。
119.这里,第一切换件401及第二切换件402上设置有第一贯穿孔4014及第二贯穿孔4024,独立的铆接件作为第五轴体50穿过第一贯穿孔4014及第二贯穿孔4024。
120.具体的,第五轴体50包括铆接柱51及铆接柱垫片52,铆接柱51具有较大尺寸的一端位于第二贯穿孔4024的下方,铆接柱51具有较小尺寸的一端依次延伸至第二贯穿孔4024及第一贯穿孔4014中,而铆接柱垫片52位于第一贯穿孔4014上方并与铆接柱51配合而锁止铆接柱51。
121.如此,可实现第一切换件401及第二切换件402的相互配接,即可实现第一切换件401及第二切换件402的相对运动,且第一切换件401及第二切换件402不会相互分离。
122.需要说明的是,第一贯穿孔4014及第二贯穿孔4024与第五轴体50相互匹配,第一切换件401相对第二切换件402原地转动。
123.在其他实施方式中,可以在第一切换件401及第二切换件402的其中之一上设置贯穿孔,其中另一上设置第五轴体50,通过第五轴体50与贯穿孔的配合实现第一切换件401与第二切换件402的相互配接,但不以此为限。
124.另外,第一切换件401包括第三轴体321,第二切换件402具有通孔4026,第三轴体321通过通孔4026而延伸至第三槽体421,第二切换件402包括第四轴体322,第四轴体322延伸至第四槽体422。
125.这里,通孔4026的尺寸可大于第三轴体321的尺寸,如此,可使得第三轴体321于通孔4026内活动,当第一切换件401与第二切换件402相对运动时,可避免通孔4026与第三轴体321相互干涉。
126.也就是说,本实施方式的第三轴体321及第四轴体322位于不同的切换件,但不以此为限。
127.在本实施方式中,结合图9及图13,第一切换件401包括依次叠置的第一衬片4011、第一滑片4012及第一衬套4013,第二切换片402包括依次叠置的第二衬片4021、第二滑片4022及第二衬套4023。
128.这里,第一铰链件31、第一衬片4011、第一滑片4012、第一衬套4013、第二衬片4021、第二滑片4022、第二衬套4023及第二铰链件32由上到下依次叠置。
129.第一衬片4011、第一衬套4013、第二衬片4021及第二衬套4023为塑料材质,例如为聚甲醛(polyformldehyde,pom)等。
130.第一滑片4012及第二滑片4022为金属材质,例如为不锈钢或q235钢等。
131.第一衬片4011、第一滑片4012及第一衬套4013的外轮廓相互匹配,第一衬片4011与第一衬套4013相互配合而将第一滑片4012夹设于两者之间,且第一衬片4011、第一滑片4012及第一衬套4013上均需要设置槽孔以配合形成第一上槽体413、第二上槽体415及第一贯穿孔4014。
132.这里,可仅在第一滑片4012及第一衬套4013上形成槽孔而形成第一贯穿孔4014,即第一贯穿孔4014未贯穿第一衬片4011,此时,第五轴体50从第一切换件401的下方延伸至第一贯穿孔4011中,而第一衬片4011可遮蔽第一贯穿孔4014及第五轴体50,提高美观度。
133.第二衬片4021、第二滑片4022及第二衬套4023的外轮廓相互匹配,第二衬片4021与第二衬套4023相互配合而将第二滑片4022夹设于两者之间,且第二衬片4021、第二滑片4022及第二衬套4023上均需要设置槽孔以配合形成第一下槽体414、第二下槽体416及第二贯穿孔4024。
134.这里,可仅在第二衬片4021及第二滑片4022上形成槽孔而形成第二贯穿孔4024,即第二贯穿孔4024未贯穿第二衬套4023,此时,第五轴体50从第二衬套4023的下方延伸至第二贯穿孔4024及第一贯穿孔4011中,而第二衬套4023可遮蔽第二贯穿孔4024及第五轴体50,提高美观度。
135.此时,第五轴体50的铆接柱51的一端可限位于第二衬套4023中,进一步提高第二衬片4021、第二滑片4022及第二衬套4023的配合效果。
136.在本实施方式中,第一切换件401还包括包覆第一衬片4011、第一滑片4012及第一衬套4013周缘的第一装饰片4015,第二切换件402还包括包覆第二衬片4021、第二滑片4022及第二衬套4023周缘的第二装饰片4025,第一装饰片4015与第二装饰片4025相互分离。
137.这里,“第一装饰片4015与第二装饰片4025相互分离
””
是指第一装饰片4015与第二装饰片4025为相互独立的结构,当第一切换件401与第二切换件402相对运动时,第一装饰片4015与第二装饰片4025也会产生相对运动。
138.另外,本实施方式的第一装饰片4015呈“门”字型,即第一装饰片4015仅包覆第一切换件401的三个侧面,便于第一装饰片4015的组装,且可在这三个侧面处设置卡扣结构而实现与第一装饰片4015的配合,于第一切换件401与第二切换件402的叠加方向上,第一装饰片4015的宽度大致等于第一衬片4011、第一滑片4012及第一衬套4013的厚度之和。
139.同样的,第二装饰片4025呈“门”字型,即第二装饰片4025仅包覆第二切换件402的三个侧面,便于第二装饰片4025的组装,且可在这三个侧面处设置卡扣结构而实现与第二装饰片4025的配合,于第一切换件401与第二切换件402的叠加方向上,第二装饰片4025的宽度大致等于第二衬片4021、第二滑片4022及第二衬套4023的厚度之和。
140.第一装饰片4015及第二装饰片4025可由abs(acrylonitrile butdiene styrene)塑料制成。
141.下面,介绍铰链组件30的具体工作流程。
142.在本实施方式中,箱体10包括邻近铰链组件30且在门体20转动路径延伸段上的外侧面13,门体20包括远离容纳腔室s的前壁21及始终夹设于前壁21及容纳腔室s之间的侧壁22,前壁21与侧壁22之间具有侧棱23。
143.结合图14至图17,当门体20处于关闭状态时,第一切换件401与第二切换件402相对静止,第一上自由段4131与第一下自由段4141重合形成第一自由段s1,第二上自由段4151与第二下自由段4161重合形成第二自由段s2,第一轴体311位于初始位置a1,第二轴体312位于第一段l1远离第二段l2的一端,凸块25限位于凹槽12中。
144.具体的,凸块25限位于凹槽12中而使得竖梁80延伸至第二门体207处,即此时竖梁80将贴附在第一门体206、第二门体207的内侧表面,以防止容纳腔室s内的冷气泄漏至对冰箱100的外部。
145.另外,外侧面13与侧壁22位于同一平面,可以保证外观上的流畅性,提高美观度,且也便于门体20的安装,但不以此为限。
146.结合图18至图21,当门体20处于由关闭状态开启至第一中间开启角度α11的过程中时,第一切换件401与第二切换件402相对静止,第一上自由段4131与第一下自由段4141重合形成第一自由段s1,第二上自由段4151与第二下自由段4161重合形成第二自由段s2,第一轴体311于初始位置a1原地转动,第二轴体312以第一轴体311为圆心而于第一段l1内运动,门体20相对箱体10原地转动而使得凸块25脱离凹槽12。
147.具体的,凸块25通过缺口121逐渐脱离凹槽12,同时,竖梁80朝靠近容纳腔室s的一侧转动而使得第一门体206与竖梁80之间具有第一折叠角度β。
148.这里,当凸块25完全脱离凹槽12时,第一折叠角度β较佳保持在小于90度,避免竖梁80影响第二门体207的开启和关闭。
149.需要说明的是,由于凸块25及凹槽12之间为弧形配合,当门体20处于关闭状态时,于第一方向x或第二方向y上,凸块25及凹槽12是相互限位的,若此时在门体20开启至第一中间开启角度α11的过程中门体20沿第一方向x或第二方向y发生位移,那么凸块25与凹槽11之间会相互干涉卡死而导致凸块25无法脱离凹槽12,从而导致门体20无法开启。
150.本实施方式在门体20开启至第一中间开启角度α11的过程中门体20相对箱体10原地转动,保证在此过程中门体20沿第一方向x或第二方向y不会发生位移,进而保证凸块25可以顺利脱离凹槽12。
151.这里,第一中间开启角度α11不大于10
°
,也就是说,大约在门体20开启至10
°
的过程中,凸块25就可以不受到凹槽12的限制作用,此时,可以是凸块25完全脱离凹槽12,或者是凸块25即使沿第一方向x或第二方向y发生位移也不会与凹槽12相互干涉的状态。
152.结合图22至图25,当门体20处于由第一中间开启角度α11继续开启至第二中间开启角度α12的过程中时,第一切换件401与第二切换件402相对静止,第一上自由段4131与第一下自由段4141重合形成第一自由段s1,第二上自由段4151与第二下自由段4161重合形成第二自由段s2,第二轴体312于第二段l2内运动而带动第一轴体311由初始位置a1运动至停止位置a2,门体20由枢转侧p朝向容纳腔室s移动。
153.这里,侧棱23运动至位于外侧面13靠近容纳腔室s的一侧,也就是说,此时铰链组件30驱动侧棱23朝靠近容纳腔室s的一侧移动,在门体20打开过程中,可以避免因侧棱23凸伸出外侧面13而与周边的橱柜或墙体等产生干涉。
154.这里,为了尽量保证箱体10的开度,避免箱体10内的抽屉、搁物架等受门体20干涉而无法打开的问题,侧棱23朝靠近容纳腔室s的一侧移动至外侧面13所在的平面内之后,铰链组件30驱动侧棱23于该平面内运动并逐渐靠近容纳腔室s。
155.也就是说,此时在保证侧棱23不凸伸出对应的外侧面13的基础上,使得侧棱23尽量靠近外侧面13,如此,既可以避免门体20在打开过程中与周边的橱柜或墙体等产生干涉,又可以尽量保证箱体10的开度。
156.结合图26至图29,当门体20处于由第二中间开启角度α12继续开启至第一开启角度α1的过程中时,第一切换件401与第二切换件402相对静止,第一上自由段4131与第一下自由段4141重合形成第一自由段s1,第二上自由段4151与第二下自由段4161重合形成第二自由段s2,第二轴体312于第三段l3内运动而带动第一轴体311由停止位置a2朝向初始位置a1运动,门体20由容纳腔室s朝向枢转侧p移动而使得侧棱23保持在外侧面13靠近容纳腔室s的一侧。
157.这里,侧棱23于外侧面13所在平面内运动并逐渐靠近容纳腔室s。
158.可以理解的,当门体20处于由第二中间开启角度α12继续开启至第一开启角度α1的过程中时,若门体20相对箱体10原地转动,侧棱23会逐渐朝靠近容纳腔室s的一侧移动,同时,门体20逐渐靠近容纳腔室s移动,门体20会阻碍箱体10内的抽屉、搁物架等的开启,即会降低箱体10的开度。
159.而本实施方式的铰链组件30驱动侧棱24于外侧面13所在平面内运动,即可以使得门体20尽量远离箱体10,保证箱体10的开度,避免箱体10内的抽屉、搁物架等受门体20干涉而无法打开的问题,又可以避免侧棱23朝远离容纳腔室s的方向凸伸出外侧面13。
160.需要说明的是,在门体20处于由关闭状态开启至第一开启角度α1的过程中时,第四轴体322始终限位于限位段4222而使得切换组件40限位第二铰链件32。
161.另外,在此过程中,由于第一上自由段4131与第一下自由段4141始终重合成第一自由段s1,第二上自由段4151与第二下自由段4161始终重合成第二自由段s2,即第一切换件401与第二切换件402的运动轨迹完全相同,且第一轴体311于第一自由段s1运动,同时,第二轴体312于第二自由段s2运动,在该过程中第一切换件401与第二切换件402始终不会相互错开,即第一切换件401与第二切换件402保持相对静止,可避免第一上自由段4131与第一下自由段4141相互错位,同时避免第二上自由段4151与第二下自由段4161相互错位,如此,可确保第一轴体311于第一自由段s1顺畅运动,且第二轴体312于第二自由段s2顺畅运动。
162.结合图30至图33,当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时,第一切换件401及第二切换件402相对运动而使得第四轴体322脱离限位段4222,且第一轴体311和/或第二轴体312限位于锁止段4132、4142、4152、4162而使得切换组件40限位第一铰链件31。
163.这里,“第一切换件401及第二切换件402相对运动而使得第二铰链件32脱离切换组件40的限位,且第一轴体311和/或第二轴体312限位于锁止段4132、4142、4152、4162而使
得切换组件40限位第一铰链件31”是指切换组件40与第二铰链件32之间相对运动而使得切换组件40与第二铰链件32之间不存在相互限位,切换组件40与第一铰链件31之间相对运动而使得切换组件40与第一铰链件31之间相互限位。
164.在本实施方式中,第一轴体311同时限位于第一上锁止段4132及第一下锁止段4142,第二轴体312同时限位于第二上锁止段4152及第二下锁止段4162,且第四轴体322脱离第四限位段4222,说明如下:
165.结合图36,以冰箱100嵌设于橱柜200中的简单示意图为例作说明。
166.在本实施方式中,箱体10包括开口102及环绕开口102设置的前端面103,箱体10还包括容纳腔室s及邻近铰链组件30且在门体20转动路径延伸段上的外侧面13,门体20包括远离容纳腔室s的前壁21及始终夹设于前壁21及容纳腔室s之间的侧壁22,前壁21与侧壁22之间具有侧棱23。
167.这里,当门体20处于关闭状态开启至第一开启角度α1的过程中时,门体20以第一轴体311为轴转动,第一轴体311与前端面103之间具有第一距离,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,门体20以第三轴体321为轴转动,第三轴体321与前端面103之间具有第二距离,第二距离大于第一距离,如此,可大大提高全嵌式冰箱100的最大开启角度。
168.另外,第一轴体311与外侧面13之间具有第三距离,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第三轴体321与外侧面13之间具有第四距离,第四距离小于第三距离,可进一步提高箱体10的开度。
169.具体说明如下:
170.在冰箱100的某些运动轨迹中,第一轴体311及第三轴体321会相对门体20运动,或者,铰链组件30还包括配合第一轴体311的第二轴体312及配合第三轴体321的第四轴体322,为了简化说明,简单看做门体20先是以第一轴体311为轴进行转动,而后通过切换组件40切换至以第三轴体321为轴进行转动。
171.实际操作中,为了提高嵌入效果,较佳是使得冰箱100完全嵌入至橱柜200中,冰箱100为自由嵌入式冰箱,即橱柜200的前端201与门体20远离箱体10的一侧前壁21位于同一平面,或者是门体20的前壁21完全不凸伸出橱柜200的前端201。
172.现有技术中,冰箱均为单轴冰箱,且冰箱的旋转轴与冰箱侧壁及前壁之间需要保持一定的距离,如此,才能有足够的空间来满足发泡或其他工艺,即现有的冰箱的旋转轴位置大致位于图36中的第一轴体311位置,在这种情况下,将单轴冰箱嵌入至橱柜200之后,由于橱柜200夹设于前端201与内壁202之间的棱角203与门体20侧棱23对应设置,当门体20开启时,侧棱23会与门体20干涉而限制门体20的最大开启角度,而为了保证门体20的正常开启,现有技术的通常做法是增大橱柜200内壁202与冰箱100之间的间隙,该间隙大致需要为10cm左右,而这将严重影响嵌入效果,且不利于有限空间的合理利用。
173.结合图36,阴影区域表示处于关闭状态的门体20,当门体20处于开启过程中时,若门体20始终以第一轴体311为轴转动(即现有技术),参考图36中的虚线门体20’,由于第一轴体311靠近前端面103,即此时第一轴体311远离橱柜200的前端201,当门体20’开启至一定角度后,橱柜200的棱角203会与门体20’相互干涉而限制门体20’的最大开启角度。
174.而在本实施方式中,第三轴体321位于第一切换件401上,在门体20开启过程中,切
换组件40相对第一铰链件31、第二铰链件32运动而使得第三轴体321逐渐远离前端面103,即第三轴体321逐渐朝靠近橱柜200的前端201的方向移动,亦即,此时整个门体20朝远离箱体10的方向运动,参考图36中的实线门体20,橱柜200棱角203对门体20的干涉作用大大减小,门体20开启至较大的角度才会有橱柜200棱角203相互干涉,从而大大提高了门体20的最大开启角度。
175.也就是说,本实施方式通过切换组件40的作用可使得后期门体20以第三轴体321为轴转动,在保证冰箱100自由嵌入橱柜200的前提下,可有效提高门体20的最大开启角度,进而便于用户操作冰箱100,可大大提高用户体验。
176.而且,本实施方式无需增大橱柜200内壁202与冰箱100之间的间隙,可以做到冰箱100与橱柜200的无缝连接,大大提高了嵌入效果。
177.另外,本实施方式的切换组件40在带动第三轴体321逐渐朝靠近橱柜200的前端201的方向移动的同时,也带动第三轴体321逐渐靠近橱柜200的内壁202,也就是说,当门体20以第三轴体321为轴进行转动时,此时的第三轴体321相较于第一轴体311更加靠近橱柜200的前端201及内壁202,如此,即可以提高门体20的最大开启角度,又可使得门体20远离箱体10以增加箱体10的开度,便于箱体10内搁物架、抽屉等的开闭,或者说,可便于物品的取放。
178.当然,最终作为旋转轴的第三轴体321也可位于其他位置,例如,当门体20以第三轴体321为轴进行转动时,此时的第三轴体321相较于第一轴体311靠近橱柜200的前端201,且第三轴体321相较于第一轴体311远离橱柜200的内壁202等等。
179.可以理解的是,切换组件40控制门体20开启、闭合过程中第一铰链件31、第二铰链件32的切换顺序,可有效避免门体20在开闭过程中与橱柜200相互干扰。
180.需要说明的是,在本实施方式中,第一上锁止段4132为第一上自由段4131中靠近初始位置a1的部分,当门体20开启至第一开启角度α1时,第一轴体311由停止位置a2朝向初始位置a1运动而未到达初始位置a1,当门体20处于由第一开启角度α1继续开启至第二开启角度α2的过程中时,第一轴体311运动至初始位置a1(即运动至第一上锁止段4132),同时,第二轴体312运动至第一下锁止段4142,在此过程中,门体20实质继续由容纳腔室s朝向枢转侧p运动。
181.结合图34至图37,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第一切换件401与第二切换件402相对静止,第三轴体321于第三自由段421运动,第四轴体322于第四自由段4221运动。
182.这里,第一开启角度α1的范围大致为80
°
~83
°
,第二开启角度α2大约为90
°
,最大开启角度α3大于90
°
,也就是说,在门体20开启至80
°
~83
°
的过程中,门体20先原地转动,再沿第一方向x产生位移,避免门体20在打开过程中与周边的橱柜或墙体等产生干涉,而后门体20再沿第二方向y产生位移,避免门体20阻碍箱体10内的抽屉、搁物架等的开启,最后达到80
°
~83
°
,此后,门体20在继续打开至90
°
的过程中,切换组件40产生运动而使得门体20更换旋转轴继续转动,即在90
°
之后门体20以第三轴体321为旋转轴相对箱体10继续原地转动而进一步打开门体20。
183.可以理解的是,角度不以上述说明为限。
184.可以看到,本实施方式通过切换组件40对第一铰链件31、第二铰链件32的解锁、锁
止作用,可以有效控制第一铰链件31及第二铰链件32的顺序切换,使得门体20可稳定开启。
185.可以理解的,当门体20处于闭合过程中时,即门体20由最大开启角度α3开始闭合时,切换组件40也可有效控制第一铰链件31及第二铰链件32的顺序切换,即当门体20处于由最大开启角度α3闭合至第二开启角度α2的过程中时,第三轴体321于第三自由段4211运动,第四轴体322于第四自由段4221运动,且切换组件40锁止第一铰链件31,当门体20处于由第二开启角度α2闭合至第一开启角度α1的过程中时,第一切换件401及第二切换件402相对运动而使得第一铰链件31脱离切换组件40的限位,且第四轴体322限位于第四限位段4222,切换组件40锁止第二铰链件32,当门体20处于由第一开启角度α1闭合至完全闭合的过程中时,第一轴体311于第一自由段s1运动,第二轴体312于第二自由段s2运动。
186.换句话说,门体20的闭合过程与门体20的开启过程是顺序相反的过程,通过切换组件40对第一铰链件31、第二铰链件32的解锁、锁止作用,可以有效控制门体20开启、闭合过程中第一铰链件31、第二铰链件32的切换顺序。
187.在本实施方式中,第一轴体311的中心与侧棱23之间为第一间距,第一轴体311的中心与前壁21之间为第二间距,第一轴体311的中心与侧壁22之间为第三间距,第三轴体312的中心与侧棱23之间为第四间距,第三轴体312的中心与前壁21之间为第五间距,第三轴体312的中心与侧壁22之间为第六间距,当门体20处于由关闭状态开启至第一开启角度α1的过程中时,第一间距、第二间距及第三间距均先保持不变后呈减小趋势后呈增大趋势,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第四间距、第五间距及第六间距均保持不变。
188.另外,在本实施方式中,第一轴体311与第三轴体321相互错开,如此,可适用于嵌入式橱柜或容纳冰箱100的空间较小的场景。
189.结合图38,以冰箱100嵌设于橱柜200中的简单示意图为例作说明。
190.在本实施方式中,箱体10包括开口102及环绕开口102设置的前端面103,箱体10还包括容纳腔室s及邻近铰链组件30且在门体20转动路径延伸段上的外侧面13,门体20包括远离容纳腔室s的前壁21及始终夹设于前壁21及容纳腔室s之间的侧壁22,前壁21与侧壁22之间具有侧棱23。
191.这里,当门体20处于关闭状态开启至第一开启角度α1的过程中时,门体20以第一轴体311为轴转动,第一轴体311与前端面103之间具有第一距离,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,门体20以第三轴体321为轴转动,第三轴体321与前端面103之间具有第二距离,第二距离大于第一距离,如此,可大大提高全嵌式冰箱100的最大开启角度。
192.另外,第一轴体311与外侧面13之间具有第三距离,当门体20处于由第二开启角度α2继续开启至最大开启角度α3的过程中时,第三轴体321与外侧面13之间具有第四距离,第四距离小于第三距离,可进一步提高箱体10的开度。
193.具体说明如下:
194.在冰箱100的某些运动轨迹中,第一轴体311及第三轴体321会相对门体20运动,或者,铰链组件30还包括配合第一轴体311的第二轴体312及配合第三轴体321的第四轴体322,为了简化说明,简单看做门体20先是以第一轴体311为轴进行转动,而后通过切换组件40切换至以第三轴体321为轴进行转动。
195.实际操作中,为了提高嵌入效果,较佳是使得冰箱100完全嵌入至橱柜200中,冰箱100为自由嵌入式冰箱,即橱柜200的前端201与门体20远离箱体10的一侧前壁21位于同一平面,或者是门体20的前壁21完全不凸伸出橱柜200的前端201。
196.现有技术中,冰箱均为单轴冰箱,且冰箱的旋转轴与冰箱侧壁及前壁之间需要保持一定的距离,如此,才能有足够的空间来满足发泡或其他工艺,即现有的冰箱的旋转轴位置大致位于图38中的第一轴体311位置,在这种情况下,将单轴冰箱嵌入至橱柜200之后,由于橱柜200夹设于前端201与内壁202之间的棱角203与门体20侧棱23对应设置,当门体20开启时,侧棱23会与门体20干涉而限制门体20的最大开启角度,而为了保证门体20的正常开启,现有技术的通常做法是增大橱柜200内壁202与冰箱100之间的间隙,该间隙大致需要为10cm左右,而这将严重影响嵌入效果,且不利于有限空间的合理利用。
197.结合图38,阴影区域表示处于关闭状态的门体20,当门体20处于开启过程中时,若门体20始终以第一轴体311为轴转动(即现有技术),参考图38中的虚线门体20’,由于第一轴体311靠近前端面103,即此时第一轴体311远离橱柜200的前端201,当门体20’开启至一定角度后,橱柜200的棱角203会与门体20’相互干涉而限制门体20’的最大开启角度。
198.而在本实施方式中,第三轴体321位于第一切换件401上,在门体20开启过程中,切换组件40相对第一铰链件31、第二铰链件32运动而使得第三轴体321逐渐远离前端面103,即第三轴体321逐渐朝靠近橱柜200的前端201的方向移动,亦即,此时整个门体20朝远离箱体10的方向运动,参考图38中的实线门体20,橱柜200棱角203对门体20的干涉作用大大减小,门体20开启至较大的角度才会有橱柜200棱角203相互干涉,从而大大提高了门体20的最大开启角度。
199.也就是说,本实施方式通过切换组件40的作用可使得后期门体20以第三轴体321为轴转动,在保证冰箱100自由嵌入橱柜200的前提下,可有效提高门体20的最大开启角度,进而便于用户操作冰箱100,可大大提高用户体验。
200.而且,本实施方式无需增大橱柜200内壁202与冰箱100之间的间隙,可以做到冰箱100与橱柜200的无缝连接,大大提高了嵌入效果。
201.另外,本实施方式的切换组件40在带动第三轴体321逐渐朝靠近橱柜200的前端201的方向移动的同时,也带动第三轴体321逐渐靠近橱柜200的内壁202,也就是说,当门体20以第三轴体321为轴进行转动时,此时的第三轴体321相较于第一轴体311更加靠近橱柜200的前端201及内壁202,如此,即可以提高门体20的最大开启角度,又可使得门体20远离箱体10以增加箱体10的开度,便于箱体10内搁物架、抽屉等的开闭,或者说,可便于物品的取放。
202.当然,最终作为旋转轴的第三轴体321也可位于其他位置,例如,当门体20以第三轴体321为轴进行转动时,此时的第三轴体321相较于第一轴体311靠近橱柜200的前端201,且第三轴体321相较于第一轴体311远离橱柜200的内壁202等等。
203.可以理解的是,切换组件40控制门体20开启、闭合过程中第一铰链件31、第二铰链件32的切换顺序,可有效避免门体20在开闭过程中与橱柜200相互干扰。
204.另外,需要说明的是,通过具体的轴体槽体设计可有效控制门体20的运动轨迹,在本实施方式中,箱体10包括连接铰链组件30的枢转侧p,当门体20处于开启过程中时,铰链组件30至少驱动门体20由枢转侧p朝向容纳腔室s移动,从而避免门体20在打开过程中与周
边的橱柜或墙体等产生干涉,轴体槽体的具体设计可参考下面的实施方式。
205.在本实施方式中,位于门体20不同区域的铰链组件30结构会有区别,上述铰链组件30为位于门体20上方与箱体10之间的铰链组件30,下面,结合图39及图40,简单介绍位于门体20下方与箱体10之间的铰链组件30’。
206.下方的铰链组件30’与上方的铰链组件30的区别在于:下方铰链组件30’的第一铰链件31’上具有凸部313’,第二铰链件32’上具有对应的卡勾323’,卡勾323’为弹性件,当门体20处于闭合状态时,凸部313’作用卡勾323’发生形变而使得门体20与箱体10紧密配合,当门体20处于开启过程中时,门体20带动卡勾323’运动,卡勾323’发生形变而脱离凸部313’。
207.也就是说,当门体20处于闭合状态时,凸部313’与卡勾323’之间为过盈配合,增强了门体20的闭合效果。
208.需要注意的是,由于第一铰链件31’与第二铰链件32’之间连接有切换组件40’,第二铰链件32’还包括沿厚度方向途径切换组件40’的延伸段324’,延伸段324’连接卡勾323’,如此,可使得卡勾323’呈水平设置且可与凸部313’相互适配。
209.在本实施方式中,结合图41至图45,冰箱100为带有走线模块60的冰箱100。
210.走线模块60包括相对设置的固定端61及自由端62,固定端61连接门体20,自由端62可活动地设置于箱体10,箱体10的走线e依次经过自由端62及固定端61而延伸至门体20。
211.这里,“自由端62可活动地设置于箱体10”是指自由端62与箱体10之间不固定,随着门体20开启,自由端62可相对箱体10运动,进而使得位于走线模块60中的走线e也可随着门体20开启自由活动。
212.需要说明的是,随着冰箱100的智能化及多功能化,冰箱100门体20上通常会设置一些功能模块,例如制冰模块、显示模块等等,该些模块通常需要通过走线e与箱体10中的控制模块连接,本实施方式的走线e通过走线模块60延伸至门体20,可有效避免在门体20开闭过程中出现走线e被拉扯的现象,且可适应各种运动轨迹的门体20,例如当铰链组件30驱动门体20由枢转侧p朝向容纳腔室s移动时,走线e的延伸轨迹也会发生变化,本实施方式通过走线模块60的设计可完全适应门体20的这种移动,即可通过走线模块60灵活调节走线e的延伸轨迹,避免卡线。
213.在本实施方式中,冰箱100还包括限位空间101,限位空间101包括朝向门体20设置的槽口1011,走线模块60的固定端61穿过槽口1011而连接门体20,当门体20处于打开过程中时,门体20带动走线模块60于限位空间101内运动,且自由端62始终位于限位空间101内。
214.这里,限位空间101位于箱体10的顶部11,走线模块60平行于箱体10的顶部11设置,且固定端61活动连接门体20,当然,限位空间101也可设置于其他区域。
215.具体的,在本实施方式中,走线模块60包括第一壳体601及第二壳体602,第二壳体602邻近箱体10的顶部11设置,第一壳体601相对第二壳体602远离箱体10的顶部11,第一壳体601及第二壳体602相互配合形成容纳走线e的容纳腔体603,容纳腔体603的两端开口为固定端61及自由端62。
216.门体20朝上方凸伸出箱体10的顶部11,顶部11靠近门体20的边缘设有凸伸出顶部11的止挡111,止挡111处开设有槽口1011,冰箱100包括凸伸出顶部11的若干突出部112,若干突出部112围设形成限位空间101。
217.这里,第一铰链件31固定于顶部11的边缘位置,且为了适应门体20凸伸出顶部11的设计,铰链组件30的第一铰链件31大致呈z型,如此,第一铰链件31可由箱体10顶部11延伸至门体20的顶部而与位于门体20顶部的切换组件40相互适配,而若干突出部112包括位于第一铰链件31与走线模块60之间的第一突出部1121及与第一突出部1121间隔设置的第二突出部1122,第一突出部1121可避免走线模块60与第一铰链件31相互干扰,且第一突出部1121的轮廓与走线模块60的运动轨迹相适应,第二突出部1122可为若干凸柱,以减小走线模块60与第二突出部1122的撞击。
218.冰箱100还可以包括罩体103,罩体103位于顶部11并覆盖限位空间101、第一铰链件31等等,罩体103可与止挡111相互适配,且罩体103的形状可根据具体需求而定。
219.另外,走线模块60的固定端61及槽口1011均靠近铰链组件30设置,可以理解的,在门体20开启过程中,走线模块60会暴露于门体20开启间隙内,将固定端61及槽口1011靠近铰链组件30设置,一方面,可合理控制走线模块60的运动轨迹,另一方面,可避免走线模块60影响外观及冰箱100的正常使用。
220.走线模块60呈水平设置并经过槽口1011延伸至门体20处,门体20内设有走线孔h,走线e从固定端61伸出并由走线孔h延伸至门体20内部,邻近走线孔h的区域c与固定端61区域枢轴连接,且门体20包括覆盖固定端61、走线孔h及区域c的盖体24,如此,便可实现走线模块60与门体20的活动连接,当门体20处于开启过程中时,门体20带动走线模块60运动,走线模块60在限位空间101内可按照不同的轨迹自由活动,也就是说,走线模块60的运动轨迹可完全适应门体20的运动轨迹,从而避免卡线。
221.另外,走线模块60包括圆弧段d,可进一步避免走线e在容纳腔体603内部被干扰。
222.需要说明的是,为了避免走线模块60的磨损及滑动噪音,可在走线模块60的第二壳体602及箱体10的顶部11之间设置缓冲部件或滑动部件等,具体可根据实际情况而定。
223.在本实施方式中,限位空间101的槽口1011具有第一槽口宽度,走线模块60包括位于固定端61及自由端62之间的活动部63,第一槽口宽度大于活动部63的最大宽度。
224.也就是说,随着门体20开启,活动部63逐渐凸伸出限位空间101,而第一槽口宽度大于活动部63的最大宽度,可避免槽口1011限制活动部63凸伸出限位空间101,且槽口1011可一定程度控制走线模块60的运动轨迹,避免走线模块60运动幅度过大而脱离限位空间101。
225.这里,为了进一步避免走线模块60脱离限位空间101,可将自由端62设置成弯折状,即自由端62与活动部63之间形成一夹角。
226.以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,例如,不同的实施例中的技术若可叠加使用以同时达到对应的效果,其方案也在本发明的保护范围内。本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1