一种基于声音的机器人预警方法及系统与流程
1.本发明属于机器人控制技术领域,更具体地说,涉及一种基于声音的机器人预警方法及系统。
背景技术:
2.如今许多领域中都涉及到人工远程控制机器人,如无人机控制、危险环境探测等任务。经过调查研究发现,人工远程控制机器人时使用的听觉辅助装置只能输出机器人周围的声音,同时,人工远程控制机器人时,摄像头存在视野盲区导致机器人容易发生碰撞,难以进行有效的避障,人工远程控制机器人时容易发生碰撞和剐蹭,导致机器人发生损坏;且现有的机器人听觉辅助输出内容单一,不能有效的对控制机器人进行辅助。
3.针对上述问题也进行了相应的改进,如中国专利申请号cn201880004168.6,公开日为2019年6月18日,该专利公开了一种机器人规避控制方法及相关装置,其中方法包括:当机器人接收到外部对象的触发时,获取所述机器人被所述外部对象所触发的位置;根据所述机器人被所述外部对象所触发的位置确定所述外部对象的方位信息;根据所述外部对象的方位信息和预先获取的所述机器人所在环境的环境地图,确定躲避移动策略,所述躲避移动策略是根据所述方位信息和所述环境地图确定的,用于控制所述机器人在所述环境地图内移动以躲避在所述方位信息所指示方位上发出的会对所述机器人产生触发的外部对象;按照所述躲避移动策略生成移动指令,所述移动指令用于控制所述机器人移动。该专利虽能有效进行规避,但是对于声音预警这块并未做过多介绍。
4.又如中国专利申请号cn202110578824.7,公开日为2021年8月31日,该专利公开了一种智能巡防机器人系统,应用于安防机器人,其包括动态监控组件、控制组件、强声驱散组件、报警组件、导航组件和热成像组件,动态监控组件包括通信模块、存储模块、光学部件和声学部件,其中,光学部件包括环视摄像头和人脸识别模块,声学部件包括监听设备、语音识别模块、扩音设备和音频模块,通过环视摄像头和人脸识别模块主动识别人脸并比对,通过监听设备和语音识别模块监听周围声音并比对,发现可疑情况时及时报警;该系统能够自动识别可疑人员,自动预警特殊事件等安防能力,全方位进行监控,全面采集安防数据,且具有多种功能,帮助处理特殊事件,提高社会智能安防水平。该专利的不足之处在于:成本过高,且在机器人身上集成众多模块,容易相互发生干扰,且不稳定。
技术实现要素:
5.1、要解决的问题
6.针对现有机器人工作损坏率高且控制力度差的问题,本发明提供一种基于声音的机器人预警方法及系统。本发明能够有效减少机器人的碰撞次数,提高机器人使用寿命;同时避免人耳对提示音产生惰性,进行不同分贝播放,有效保证操作人员对机器人的控制。本发明的系统结构简单,工作稳定。
7.2、技术方案
8.为解决上述问题,本发明采用如下的技术方案。
9.一种基于声音的机器人预警方法,包括以下步骤:
10.s1:在机器人上安装测距装置,测距装置将数据传输至控制端,所述测距装置能够测量机器人四周360
°
全角度的障碍物距离信息,
11.s2:控制端将测距装置传输的数据按照特定角度进行分区,每个分区中将数据最小的一份障碍物距离信息确认为目标障碍物距离;
12.s3:对每一个目标障碍物距离按照公式求取提示音系数,所述公式具体如下:
[0013][0014]
式中:radius为机器人底盘内径;distance为目标障碍物距离;e为自然常数;
[0015]
s4:根据提示音系数确定提示音分贝,随后按照提示音分贝播放给工作人员。
[0016]
更进一步的,所述步骤s4具体包括如下步骤:
[0017]
s41:将若干份提示音系数进行等级划分,并根据相应的等级设置对应的提示音分贝;
[0018]
s42:提示音分贝通过音频播放装置播放给操控机器人的工作人员,工作人员对应对机器人进行调整。
[0019]
更进一步的,所述步骤s42中音频播放装置为多扬声器3d耳机,多扬声器3d耳机与控制端连接,所述多扬声器3d耳机包括外壳,外壳的两端部分别设有左耳和右耳,且左右耳内部均设置有一个扬声器和麦克风,外壳上设置有若干个扬声器。
[0020]
更进一步的,在使用多扬声器3d耳机前,先进行hrtf函数的匹配。
[0021]
一种使用如上述任一项基于声音的机器人预警方法的系统,包括:机器人和控制系统,机器人上设置有测距装置,机器人、测距装置均分别与控制系统电连接,所述控制系统包括:
[0022]
接收组件:用于接收测距装置反馈的数据;
[0023]
分区并确定目标障碍物距离组件:用于将接收到的障碍物距离信息按照特定角度进行分区,并确定每个分区中的最小数据作为目标障碍物距离;
[0024]
提示音系数计算组件:用于计算每个目标障碍物距离的提示音系数;
[0025]
提示音分贝组件:根据不同的提示音系数确定不同的提示音分贝;
[0026]
音频播放组件:用于播放提示音给操控机器人的工作人员;
[0027]
控制组件:用于对机器人进行控制。
[0028]
更进一步的,所述控制系统还包括路径规划组件:用于对机器人的路径进行规划。
[0029]
3、有益效果
[0030]
相比于现有技术,本发明的有益效果为:
[0031]
(1)本发明通过机器人上的测距装置测量机器人四周360
°
的障碍物距离信息,全角度的测量避免存在盲区,保证障碍物数据信息的准确性与全面性;同时对障碍物数据按照特定角度进行分区,并且将每个分区内障碍物数据最小的值作为目标障碍物距离,减小计算压力,保证数据可信的同时提高计算效率;对每一个目标障碍物距离进行计算得到提示音系数,由提示音系数确定提示音分贝,最终按照提示音分贝对操控机器人的工作人员
进行障碍物预警提醒;整个方法操控简单,降低工作人员的操作难度,并且能够有效减小机器人的碰撞次数,提高机器人的使用寿命,采用不同提示音分贝对工作人员进行提醒能够避免人耳对连续的提示音产生惰性,进一步有效克服人工远程控制机器人过程中由于视野限制所导致的机器人碰撞现象发生;
[0032]
(2)本发明通过对若干份提示音系数进行等级划分,根据不同的等级确定提示音分贝,避免一个提示音系数对应一个提示音分贝所带来的资源浪费以及计算成本高的问题;根据不同等级划分确定不同的提示音分贝,更进一步避免人耳对提示音产生的惰性,提高整个过程的安全性;同时采用多扬声器3d耳机作为音频播放装置,增加操作人员的立体空间感,使得操作人员能够确定障碍物的相对位置,进一步保证对机器人远程操作的准确性,避免机器人碰撞到障碍物导致损坏;
[0033]
(3)本发明的系统能够通过对接收到的数据进行分区,确定目标障碍物距离;随后根据目标障碍物距离计算得到提示音系数,继而确定提示音分贝,对操控机器人的工作人员按照提示音分贝进行提示,有效对机器人进行避障预警,并且一改往日相同分贝的提示音,避免工作人员人耳产生惰性,提高了工作人员的注意力,继而提高了对机器人操控的安全性,整体结构简单,各组件彼此之间紧密衔接,有效改善了以往远程操控机器人存在视野盲区易导致机器人损坏或不能正常工作的问题。
附图说明
[0034]
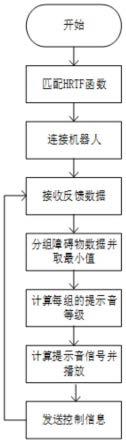
图1为机器人的工作流程;
[0035]
图2为控制系统的工作流程。
具体实施方式
[0036]
下面结合具体实施例和附图对本发明进一步进行描述。
[0037]
实施例1
[0038]
鉴于机器人的使用越来越广泛,但是远程操作机器人的时候容易存在视野盲区对机器人的操作不太顺利,机器人容易发生碰撞或剐蹭导致机器人发生损坏,因此如图1和图2所示,本发明特提出一种基于声音的机器人预警方法,包括以下步骤:
[0039]
s1:在机器人上安装测距装置,测距装置将数据传输至控制端,所述测距装置能够测量机器人四周360
°
全角度的障碍物距离信息;具体的,即所述测距装置能够测量机器人四周所有的障碍物距离信息,其能够进行测量机器人360
°
范围内的所有障碍物距离信息,将所测量到的若干个障碍物距离信息传输至控制端以此来保证测量数据的全面性与准确性,避免存在测量盲区,进而提高对机器人的控制精准性;在本实施例中测距装置可以为360
°
激光测距雷达,结构简单且测量结果精准,易于在机器人上进行安装;
[0040]
s2:控制端将测距装置传输的数据按照特定角度为间隔进行分区,每个分区中将数据最小的一份障碍物距离信息确认为目标障碍物距离;在这进行说明的是,由于测距装置反馈给终端的是若干条不同角度对应的障碍物距离信息数据,因此控制端对这些数据按照特定角度进行分区,在本实施例中以45
°
为间隔进行分区分成8个分区,即0
°
~45
°
为第一分区,在该角度范围内的障碍物距离信息数据统一归类到第一分区;45
°
~90
°
为第二分区,在该角度范围内的障碍物距离信息数据统一归类到第二分区,以此类推,直至315
°
~360
°
为第八分区,在该角度范围内的障碍物距离信息数据统一归类到第八分区;分区后对每个区内的障碍物距离信息数据进行比较,因每个区内数据最小的即代表该区内障碍物距离机器人最近,所以选择最小的障碍物距离信息数据作为目标障碍物距离;将若干条数据进行分区管控,一来便于归类管控,提高工作效率;二来减轻计算压力,避免造成资源的浪费;当然,值得说明的是本实施例按照45
°
为间隔进行分区,既能够保证分区较为细致又能减少目标障碍物距离的数量选择,减轻后续计算压力;当然本技术对特定角度不做具体限定,可由实际情况进行具体选择,当然特定角度选择的越小则说明分区越细致,测量越为精准;
[0041]
s3:对每一个目标障碍物距离按照公式求取提示音系数,所述公式具体如下:
[0042][0043]
式中:radius为机器人底盘内径;distance为目标障碍物距离;e为自然常数;在这值得说明的是,该公式的灵感来源于ros系统中代价值的函数曲线,发明人在该基础上进行不断的摸索与变换,付诸了大量脑力活动得到该公式,使得该公式相比于ros系统中的函数曲线变化更加急促,对障碍物的反应更加灵敏;进一步保障整个测量结果的准确性;
[0044]
s4:根据提示音系数确定提示音分贝,随后按照提示音分贝播放给工作人员;在该步骤中具体的,包括如下步骤:
[0045]
s41:将若干份提示音系数进行等级划分,并根据相应的等级设置对应的提示音分贝;等级划分标准如下表1所示:
[0046]
表1提示音等级表
[0047]
提示音系数范围提示音等级提示音分贝》253165128-2532301-1283100-140
[0048]
本技术的发明人通过不断的实验与总结,发现当提示音系数大于253说明理论上机器人已经撞到障碍物,而253-128取的是经验值,说明机器人比较靠近障碍物了,128-1说明有障碍物但距离机器人较远,0-1说明很空旷,机器人附近不存在障碍物。更具体的,想要把提示音系数控制在254-0之内,所以前面乘于253,其中254二进制是11111110,如果有小数存储方式问题导致有进位现象也不会出现内存溢出,后面将提示音系数范围进行等级划分为254-253;254-128;128-1;1-0这四档。
[0049]
s42:提示音分贝通过音频播放装置播放给操控机器人的工作人员,工作人员通过控制端对应对机器人进行调整。在该步骤中采用不同的提示音分贝播放给工作人员,能够有效的避免工作人员的人耳对提示音产生惰性,能够更好的对工作人员进行提醒,并且按照障碍物距离机器人的远近来进行提示音分别的不同,更好的保证了对工作人员提醒的及时性,从而操控机器人更加安全。
[0050]
并且,在步骤s432中更进一步的,该步骤中的音频播放装置为多扬声器3d耳机,该类耳机能够体现出一种立体感,增加操作人员的立体空间感,使得工作人员能够确定障碍物的相对位置,进一步保证对机器人远程操作的准确性,避免机器人碰撞到障碍物导致损
坏。多扬声器3d耳机与控制端连接,所述多扬声器3d耳机包括外壳,外壳的两端部分别设有左耳和右耳,且左右耳内部均设置有一个扬声器和麦克风,外壳上设置有若干个扬声器。更具体的,在使用多扬声器3d耳机前,先进行hrtf函数的匹配,其具体步骤如下:外壳上的扬声器产生声音信号;左右耳内部的扬声器接收声音信号,记录声音信号与麦克风的相对位置;通过声音信号、声音角度信息和操作机器人的工作人员的头部生理参数计算相应角度的hrtf函数,由于3d耳机进行hrtf函数的匹配是较为常规的技术,本技术也不涉及到对匹配进行改进,因此不再详细赘述,使用常规的匹配方式进行hrtf函数匹配即可。
[0051]
本发明通过机器人上的测距装置测量机器人四周360
°
的障碍物距离信息,全角度的测量避免存在盲区,保证障碍物数据信息的准确性与全面性;同时对障碍物数据按照特定角度进行分区,并且将每个分区内障碍物数据最小的值作为目标障碍物距离,减小计算压力,保证数据可信的同时提高计算效率;对每一个目标障碍物距离进行计算得到提示音系数,由提示音系数确定提示音分贝,最终按照提示音分贝对操控机器人的工作人员进行障碍物预警提醒;整个方法操控简单,降低工作人员的操作难度,并且能够有效减小机器人的碰撞次数,提高机器人的使用寿命,采用不同提示音分贝对工作人员进行提醒能够避免人耳对连续的提示音产生惰性,进一步有效克服人工远程控制机器人过程中由于视野限制所导致的机器人碰撞现象发生。
[0052]
实施例2
[0053]
一种使用如上述实施例1中基于声音的机器人预警方法的系统,包括:机器人和控制系统,机器人上设置有测距装置,同时为了保证测距装置的安全与测量准确性,在测距装置外表面设置有保护罩;机器人、测距装置均分别与控制系统电连接,所述控制系统包括:
[0054]
接收组件:用于接收测距装置反馈的数据;
[0055]
分区并确定目标障碍物距离组件:用于将接收到的障碍物距离信息按照特定角度进行分区,并确定每个分区中的最小数据作为目标障碍物距离;
[0056]
提示音系数计算组件:用于计算每个目标障碍物距离的提示音系数;
[0057]
提示音分贝组件:根据不同的提示音系数确定不同的提示音分贝;
[0058]
音频播放组件:用于播放提示音给操控机器人的工作人员;
[0059]
控制组件:用于对机器人进行控制。
[0060]
本发明的系统各组件分工明确,能够通过对接收到的数据进行分区,确定目标障碍物距离;随后根据目标障碍物距离计算得到提示音系数,继而确定提示音分贝,对操控机器人的工作人员按照提示音分贝进行提示,有效对机器人进行避障预警,并且一改往日相同分贝的提示音,避免工作人员人耳产生惰性,提高了工作人员的注意力,继而提高了对机器人操控的安全性,整体结构简单,各组件彼此之间紧密衔接,有效改善了以往远程操控机器人存在视野盲区易导致机器人损坏或不能正常工作的问题。同时更进一步的在控制系统还包括路径规划组件:用于对机器人的路径进行规划,便于及时对机器人进行导向,提高机器人的行进效率。
[0061]
本发明所述实例仅仅是对本发明的优选实施方式进行描述,并非对本发明构思和范围进行限定,在不脱离本发明设计思想的前提下,本领域工程技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1