一种被动式的多向微动末端执行器的制作方法
1.本发明涉及机械臂末端设计领域,具体涉及一种被动式的多向微动末端执行器。
背景技术:
2.目前,大部分生产制造业都会采用机器人负责部分生产工序,例如装配工序,装配工序上往往涉及到线束端子的插拔、销钉螺钉的安装或其他精小零件的对位等,现有技术中大部分机器人都能够通过搭载视觉识别系统从而实现对孔洞的识别定位,从而将零件准确插入到孔洞中,然而对于更高精度的孔轴配合,往往因为视觉识别系统和机械臂结构的精度受限而无法完成准确装配,容易导致零件配合过程发生碰撞以致损毁。
3.为了弥补精度缺陷,现有的大部分机械臂的末端执行器都会设置触感反馈,当零件配合出现错位时,则会反馈阻力信息,用户或系统根据该阻力信息对末端执行器进行微调直至阻力消失则能够实现准确装配,然而利用上述这种主动调节的方式(主动调整末端执行器的位置),往往需要在各个方向设置多个驱动装置才能够实现,例如分别在x轴方向、y轴方向和z轴方向设置伸缩电机,从而实现沿x轴方向、y轴方向和z轴方向的往复移动,或设置转动电机,从而实现绕x轴方向、y轴方向和z轴方向的往复转动,大大增加了末端执行器的重量;同时主动调节往往需要获取反馈信息并对反馈信息进行分析运算才能够得出调整方案,因此需要复杂的算法支撑,从而要求机械臂搭载更加高端的处理系统,大大增加机械臂整体的制造成本。
4.因此,现有技术有待改进和发展。
技术实现要素:
5.本技术的目的在于提供一种被动式的多向微动末端执行器,以零件之间配合过程产生的阻力作为末端执行器的调节驱动力,以受到阻力的反方向进行自适应调整,无需配置大量驱动装置、复杂算法及价格高昂的处理系统。
6.本技术的技术方案如下:一种被动式的多向微动末端执行器,包括:机座,所述机座用于与机械臂末端连接;两个夹爪,两个所述夹爪对称安装在所述机座上;所述夹爪包括接触部、微动部和控制部,所述接触部与所述微动部连接,所述微动部与所述控制部枢轴连接;所述控制部可摆动地与所述机座连接,以使所述夹爪可在xz平面上平动从而使两个所述接触部相互靠近或远离;驱动电机,所述驱动电机安装在所述机座上,用于驱动两个所述夹爪平动;所述微动部可相对所述控制部绕x轴转动,所述微动部与所述控制部之间设置有扭簧,所述扭簧用于为所述接触部提供绕x轴方向的复位力矩;所述接触部可相对所述微动部在x轴方向、y轴方向和z轴方向往复移动,所述微动部包括第一弹性组件,所述第一弹性组件用于为所述接触部提供x轴方向、y轴方向和z轴方
向的复位力矩;所述接触部还可相对所述微动部绕y轴方向转动,所述微动部还包括第二弹性组件,所述第二弹性组件用于为所述接触部提供绕y轴方向的复位力矩。
7.本技术提供的被动式的多向微动末端执行器,区别于传统的主动式控制调节,利用末端执行器本身的机构以配合过程中产生的阻力作为动力实现位置的精细调节,从而确保零件能够精确装配。
8.进一步的,所述微动部包括第一固定座;所述控制部设置有两条沿z轴方向延伸的悬臂,所述悬臂的一端设置有沿x轴方向延伸的第一轴,一个所述扭簧固定套设在所述第一轴上;所述第一固定座扣合在所述扭簧上以使所述第一固定座在受到所述扭簧提供的复位力矩时能够绕所述第一轴的轴线转动;所述接触部与所述第一固定座连接。
9.通过设置扭簧实现接触部绕x轴方向的转动,提供该方向上的位置微调和复位能力,结构简单。
10.进一步的,所述微动部还包括第二固定座;所述第一弹性组件包括第一压缩弹簧;所述第一压缩弹簧安装在所述第一固定座上且所述第一压缩弹簧的弹力方向平行于x轴方向;所述第一压缩弹簧远离所述第一固定座的一端与所述第二固定座连接,以使所述第二固定座受所述第一压缩弹簧的弹力作用沿x轴方向往复移动;所述第二固定座与所述第一固定座之间存在间隙;所述接触部与所述第二固定座连接。
11.通过设置第一压缩弹簧实现接触部沿x轴方向的移动,提供该方向上的位置微调和复位能力,成本低廉。
12.进一步的,所述微动部还包括第三固定座;所述第一弹性组件还包括第二压缩弹簧;所述第二压缩弹簧安装在所述第二固定座远离所述第一固定座的一侧上且所述第二压缩弹簧的弹力方向平行于y轴方向;所述第三固定座套设在所述第二压缩弹簧上以使所述第三固定座受所述第二压缩弹簧的弹力作用沿y轴方向往复移动;所述接触部与所述第三固定座连接。
13.通过设置第二压缩弹簧实现接触部沿y轴方向的移动,提供该方向上的位置微调和复位能力,质量较轻。
14.进一步的,所述第一弹性组件还包括第三压缩弹簧;所述第三压缩弹簧安装在所述第三固定座上且所述第三压缩弹簧的弹力方向平行于z轴方向;所述第三压缩弹簧沿z轴方向插接有所述接触部,所述接触部与所述第三固定座滑动连接,以使所述接触部受所述第三压缩弹簧的弹力作用沿z轴方向往复移动。
15.进一步的,所述第二弹性组件包括两个弹簧片,两个所述弹簧片均设置在所述第二固定座远离所述第一固定座的一侧上;所述弹簧片包括依次连接的第一面、第二面和第三面,所述第一面和所述第三面平行设置,所述第二面同时垂直于所述第一面和所述第三面,所述第三面在所述第一面所在平面的投影与所述第一面无交集;所述第一面平行于yz平面;两个所述弹簧片的所述第一面均固定在所述第二固定座上且所述第三面均贴近在所述第三固定座上,以使所述第三固定座受所述弹簧片的弹力作用在所述xz平面上转动;两个所述弹簧片分别位于第三压缩弹簧沿z轴方向的前后两侧。
16.进一步的,所述接触部远离所述微动部的一端挖设有凹槽;所述凹槽位于两个所述接触部相互靠近的一侧上。
17.进一步的,所述控制部通过传动构件与所述机座连接;所述传动构件包括主力臂和辅助支架,所述控制部的上下两侧均与所述辅助支架铰接,所述辅助支架远离所述控制部的上下两端均与所述机座铰接;所述主力臂与所述控制部及所述机座铰接,所述驱动电机用于驱动所述主力臂摆动;所述主力臂、所述控制部和所述辅助支架在xz平面上构成平行四连杆机构,以使所述驱动电机驱动所述主力臂摆动时通过所述平行四连杆机构运动实现所述夹爪在xz平面上平动。
18.进一步的,所述主力臂的形状呈“l”形;所述驱动电机的输出端连接有丝杠,所述丝杠上套设有滑块,所述滑块可沿所述丝杠的长度方向往复滑动;所述滑块上安装有连杆,所述连杆与所述滑块转动连接;所述主力臂的一端套设在第一销轴上,所述第一销轴与所述连杆铰接,以使所述滑块沿所述丝杠的长度方向滑动时,所述主力臂受驱动力绕所述第一销轴的轴线转动;所述主力臂的拐角一端套设在第二销轴上,所述第二销轴与所述机座铰接,以使所述主力臂受所述驱动电机驱动时能绕所述第二销轴的轴线转动;所述主力臂的另一端套设在第三销轴上,所述第三销轴与所述控制部铰接,以使所述主力臂受所述驱动电机驱动时能绕所述第三销轴的轴线转动。
19.进一步的,所述驱动电机内嵌在所述机座内部。
20.本发明的有益效果:通过在x轴方向、y轴方向和z轴方向设置第一弹性组件以及在x轴方向、y轴方向和z轴方向设置扭簧和第二弹性组件以被动的方式使末端执行器在受到阻力时能够以阻力的反方向进行自适应调整,相比于主动调节的方式,免除了大量驱动装置、复杂的算法和价格高昂的处理系统,有效实现精确装配同时还大大降低了末端执行器的重量和成本。
附图说明
21.图1为本技术实施例提供的一种被动式的多向微动末端执行器的结构示意图。
22.图2为本技术实施例提供的一种被动式的多向微动末端执行器的爆炸图。
23.图3为本技术实施例中夹爪的结构示意图。
24.图4为本技术实施例中夹爪的爆炸图。
25.图5为本技术实施例中弹簧片的结构示意图。
26.图6为本技术实施例中机座和控制部装配后结构示意图。
27.图7为本技术实施例中机座、驱动电机和控制部的爆炸图。
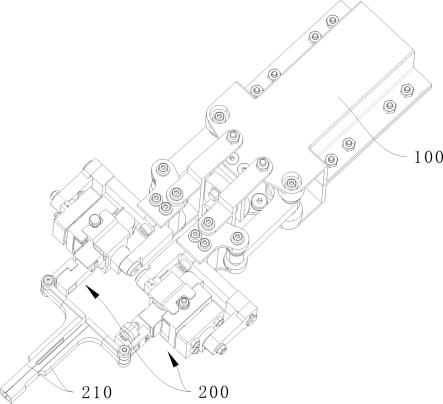
28.标号说明:100、机座;200、夹爪;210、接触部;211、凹槽;220、微动部;221、第一固定座;222、第二固定座;223、第三固定座;224、第二轴;225、第三轴;226、第四轴;227、第四固定座;230、控制部;231、悬臂;232、第一轴;240、扭簧;251、第一压缩弹簧;252、第二压缩弹簧;253、第三压缩弹簧;261、弹簧片;261a、第一面;261b、第二面;261c、第三面;300、驱动电机;310、丝杠;320、滑块;330、连杆;410、主力臂;420、辅助支架;430、第一销轴;440、第二销轴;
450、第三销轴。
具体实施方式
29.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
30.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
31.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
32.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
33.下文的公开提供了许多不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
34.需要说明的是,参考附图3,下文中的“x轴”、“y轴”和“z轴”均为对应如附图3建立的坐标系(该坐标系为末端执行器基坐标系)上的x坐标轴、y坐标轴和z坐标轴。
35.在某些实施例中,一种被动式的多向微动末端执行器,包括:机座100,机座100用于与机械臂末端连接;两个夹爪200,两个夹爪200对称安装在机座100上;夹爪200包括接触部210、微动部220和控制部230,接触部210与微动部220连接,微动部220与控制部230枢轴连接;控制部230可摆动地与机座100连接,以使夹爪200可在xz平面上平动从而使两个接触部210相互靠近或远离;
驱动电机300,驱动电机300安装在机座100上,用于驱动两个夹爪200平动;微动部220可相对控制部230绕x轴转动,微动部220与控制部230之间设置有扭簧240,扭簧240用于为接触部210提供绕x轴方向的复位力矩;接触部210可相对微动部220在x轴方向、y轴方向和z轴方向往复移动,微动部220包括第一弹性组件,第一弹性组件用于为接触部210提供x轴方向、y轴方向和z轴方向的复位力矩;接触部210还可相对微动部220绕y轴方向转动,微动部220还包括第二弹性组件,第二弹性组件用于为接触部210提供绕y轴方向的复位力矩。
36.实际使用本实施例中的被动式的多向微动末端执行器的时候,需要配合现有的定位技术对目标位置进行识别定位,例如执行将定位轴插入到定位孔中的任务时,可以通过现有的图像识别技术从图像中识别出孔的位置,然后控制机械臂带动夹持有定位轴的被动式的多向微动末端执行器移动靠近至定位孔,然而对于较高精度的孔轴配合,尽管定位轴从图像上已经对准定位孔,但因为机械臂的机械结构上本身存在一定误差(配合误差、尺寸误差等),同时图像识别技术也存在一定误差(分辨率误差、位置误差等),在两种误差同时影响下,仍然会超出孔轴配合的误差范围,最终无法准确将定位轴插入到定位孔中,当机械臂做出插入动作时,定位轴偏离定位孔与零件发生严重碰撞从而导致定位孔、定位轴和零件受损破坏。本实施例中的被动式的多向微动末端执行器则负责最后的插入步骤,通过多个方向的位置微调确保插入时孔轴配合能够符合误差要求,避免零件碰撞受损。
37.本实施例中,接触部210主要用于夹持需要定位装配的轴零件,实际使用时,机械臂带动两个夹爪200移动至轴零件上方,且轴零件位于两个接触部210之间,两个夹爪200相向移动则可以将轴零件夹持。
38.本实施例中,通过在x轴方向设置扭簧连接控制部230和微动部220,从而使微动部220能够相对控制部230绕x轴方向进行转动,在零件装配过程中,当轴零件与孔零件发生接触使得接触部210在yz平面上受到转矩时,扭簧240会因为阻力发生弹性形变从而改变接触部210的姿态进而改变轴零件与孔零件之间的相对位置,最终实现两个零件准确的连接配合;完成装配后,接触部210失去阻力,扭簧240释放积聚的弹性势能使接触部210恢复到初始位置。
39.同理,当轴零件与孔零件发生接触使得接触部210沿x轴、y轴或z轴方向受到阻力时,第一弹性组件会因为阻力发生弹性形变从而改变接触部210的姿态进而改变轴零件与孔零件之间的相对位置,完成装配后,接触部210失去阻力,第一弹性组件释放积聚的弹性势能使接触部210恢复到初始位置。
40.同理,当轴零件与孔零件发生接触使得接触部210在xz平面上受到转矩时,第二弹性组件会因为阻力发生弹性形变从而改变接触部210的姿态进而改变轴零件与孔零件之间的相对位置,完成装配后,接触部210失去阻力,第二弹性组件释放积聚的弹性势能使接触部210恢复到初始位置。
41.需要说明的是,本实施例中的被动式的多向微动末端执行器主要是实现接触部210沿x轴、y轴和z轴方向的平移,以及绕x轴和y轴的转动这5个方向的位置调整。
42.在进一步优选的实施例中,微动部220包括第一固定座221;控制部230设置沿z轴方向延伸的悬臂231;悬臂231的一端设置有沿x轴方向延伸
的第一轴232,一个扭簧240固定套设在第一轴232上;第一固定座221扣合在扭簧240上以使第一固定座221在受到扭簧240提供的复位力矩时能够绕第一轴232的轴线转动;接触部210与第一固定座221连接。
43.本实施例中,悬臂231沿z轴方向伸出,远离机座100的一端上设置第一轴232,第一轴232的直径与扭簧240的内径相同,使得扭簧240能够稳定插接在第一轴232上,且扭簧240沿x轴方向靠近悬臂231的一侧嵌入在悬臂231内,从而确保扭簧240受力扭转时,悬臂231能够固定着扭簧240避免扭簧240脱离第一轴232,同时也使扭簧240能够积聚弹性势能。
44.第一固定座221也设置有与扭簧240沿x轴方向远离悬臂231的一侧相应的容纳空间以供扭簧240嵌入到第一固定座221内,通过扭簧240实现第一固定座221与悬臂231的连接,以使接触部210在yz平面上受转矩时,第一固定座221受力转动以致扭簧240形变积聚弹性势能,待外力消失后,第一固定座221则在扭簧240的复位力矩作用下恢复原位,从而带动接触部210恢复原位。
45.在进一步优选的实施例中,微动部220还包括第二固定座222;第一弹性组件包括第一压缩弹簧251;第一压缩弹簧251安装在第一固定座221上且第一压缩弹簧251的弹力方向平行于x轴方向;第一压缩弹簧251远离第一固定座221的一端与第二固定座222连接,以使第二固定座222受第一压缩弹簧251的弹力作用沿x轴方向往复移动;第二固定座222与第一固定座221之间存在间隙;接触部210与第二固定座222连接。
46.本实施例中,第一固定座221上设置有多个沿x轴方向延伸第二轴224,第二轴224上套设第一压缩弹簧251且第一压缩弹簧251伸出于第一固定座221远离扭簧240的一侧,第二固定座222设置在第一固定座221沿x轴方向远离扭簧240的一侧处,且第二固定座222与所有第一压缩弹簧连接,以使接触部210在x轴方向上受到外力(包括拉力和压力)时,第二固定座222受力移动以致第一压缩弹簧251发生压缩或拉伸的形变积聚弹性势能,待外力消失后,第二固定座222则在第一压缩弹簧251的复位弹力作用下恢复原位,从而带动接触部210恢复原位。
47.在进一步优选的实施例中,第一弹性组件包括4个第一压缩弹簧251,4个第一压缩弹簧251成方形布置(即正方形4个角位上均设置一个第一压缩弹簧,上述正方形为概念意义,以协助理解4个第一压缩弹簧251的具体分布位置,并不显示在现实结构上)。
48.在进一步优选的实施例中,微动部220还包括第三固定座223;第一弹性组件还包括第二压缩弹簧252;第二压缩弹簧252安装在第二固定座222远离第一固定座221的一侧上且第二压缩弹簧252的弹力方向平行于y轴方向;第三固定座223套设在第二压缩弹簧252上以使第三固定座223受第二压缩弹簧252的弹力作用沿y轴方向往复移动;接触部210与第三固定座223连接。
49.本实施例中,第二固定座222上设置有沿y轴方向延伸的第三轴225,第二压缩弹簧252套设在第三轴225上,第三固定座223套设在第二压缩弹簧252上,以使接触部210在y轴方向上受到外力(包括拉力和压力)时,第三固定座223受力移动以致第二压缩弹簧252发生压缩或拉伸的形变积聚弹性势能,待外力消失后,第三固定座223则在第二压缩弹簧252的复位弹力作用下恢复原位,从而带动接触部210恢复原位。
50.在进一步优选的实施例中,第一弹性组件共包括两个第二压缩弹簧252,两个第二压缩弹簧252均沿y轴方向布置,第三固定座223位于两个第二压缩弹簧252之间,且同时连接两个第二压缩弹簧252,有利于确保在y轴方向上拥有足够的复位弹力使接触部210恢复原位。
51.在进一步优选的实施例中,第一弹性组件还包括第三压缩弹簧253;第三压缩弹簧253安装在第三固定座223上且第三压缩弹簧253的弹力方向平行于z轴方向;第三压缩弹簧253沿z轴方向插接有接触部210,接触部210与第三固定座223滑动连接,以使接触部210受第三压缩弹簧253的弹力作用沿z轴方向往复移动。
52.本实施例中,第三压缩弹簧253沿z轴方向装设在第三固定座223内部,第三压缩弹簧253的其中一端固定在第三固定座223上,另一端与接触部210连接,接触部210上还设置有第四轴226,第四轴插接在第三压缩弹簧253中,以使接触部210在z轴方向受到外力(包括拉力和压力)时,接触部210受力移动以致第三压缩弹簧253发生压缩或拉伸的形变积聚弹性势能,待外力消失后,接触部210则在第三压缩弹簧253的复位弹力作用下恢复原位。
53.在进一步优选的实施例中,第四轴226与接触部210之间为螺纹连接,用户能够根据实际需求替换不同型号的接触部210实现对不同轴零件的夹持,大大提高了本实施例中的被动式的多向微动末端执行器的普遍适用性。
54.在进一步优选的实施例中,第二弹性组件包括两个弹簧片261,两个弹簧片261均设置在第二固定座222远离第一固定座221的一侧上;弹簧片261包括依次连接的第一面261a、第二面261b和第三面261c,第一面261a和第三面261c平行设置,第二面261b同时垂直于第一面261a和第三面261c,第三面261c在第一面261a所在平面的投影与第一面261a无交集;第一面261a平行于yz平面;两个弹簧片的第一面261a均固定在第二固定座222上且第三面261c均贴近在第三固定座223上,以使第三固定座223受弹簧片261的弹力作用在xz平面上转动;两个弹簧片261分别位于第三压缩弹簧253沿z轴方向的前后两侧。
55.本实施例中,第三面261c贴近于第三固定座223,以使接触部210在xz平面上受到转矩时,接触部210受力转动以致第三固定座223压迫弹簧片261,弹簧片261形变积聚弹性势能,待外力消失后,接触部210则在弹簧片261的复位弹力作用下恢复原位。
56.需要说明的是,第三面261c在第一面261a所在平面的投影与第一面261a无交集指的是第三平面261c和第一平面261a分别位于第二平面261b的两侧,因此第三平面261a在第一面261a所在平面的投影并不会覆盖在第一平面261a上,该投影与第一平面261a无交集(第二平面261b在第一平面261a所在平面的投影为一条直线段,第三平面261a在第一面261a所在平面的投影与第一平面261a被该直线段所分割)。
57.还需要说明的是,两个弹簧片261分别位于第三固定座223沿z轴方向的前后两侧(需要说明的是,“前侧”指的是靠近接触部210的一侧,“后侧”指的是靠近机座100的一侧),使得接触部210在xz平面上受到呈逆时针或顺时针方向变化的转矩时,第三固定座223均能够使弹簧片261发生形变(例如,接触部210在xz平面上受到呈顺时针变化的转矩时,位于第三压缩弹簧253沿z轴方向的前侧的弹簧片261则会受压形变,而位于第三压缩弹簧253沿z轴方向的后侧的弹簧片261因为第三固定座223的远离而不受力,因此不会形变;当接触部210在xz平面上受到呈逆时针变化的转矩时,位于第三压缩弹簧253沿z轴方向的后侧的弹簧片261则会受压形变,而位于第三压缩弹簧253沿z轴方向的前侧的弹簧片261因为第三固
定座223的远离而不受力,因此不会形变;因而通过设置两个弹簧片261总能够确保接触部210受上述两种外力作用下都会存在一个弹簧片261发生形变积聚弹性势能,以确保接触部210能够恢复原位)。
58.在进一步优选的实施例中,微动部220还包括第四固定座227;控制部230共设置有两条沿z轴方向延伸的悬臂231,微动部220位于两条悬臂231之间,第一固定座221通过一个扭簧240与其中一个悬臂231连接(如上文提及),第四固定座227通过另一个扭簧240与另一个悬臂231连接(即本实施例中共设置有两个扭簧240),第四固定座227与扭簧240连接的方式和第一固定座221与扭簧240连接的方式一致,第二固定座222扣合在第四固定座227中,第四固定座227在y轴方向上的上下面均覆盖贴合在第二固定座222上,以限制第二固定座222在y轴方向上的移动;第二固定座222可相对第四固定座227沿x轴方向移动,且保持第四固定座227在y轴方向上的上下面与第二固定座222贴合,确保避免第二固定座222脱离第四固定座227的限制。第四固定座227与第二固定座222之间存在空间供第二压缩弹簧252、弹簧片261、第三压缩弹簧253、第三固定座223和接触部210放置或活动。其中与第四固定座227连接的扭簧240的扭向与第二固定座222连接的扭簧240的扭向相反,以使接触部210在yz平面上受到呈逆时针或顺时针方向变化的转矩时,均能够使其中一侧的扭簧240绕自身扭向发生形变,有利于确保接触部210能够正确复位至初始位置。
59.在某些实施例中,接触部210远离微动部220的一端挖设有凹槽211;凹槽211位于两个接触部210相互靠近的一侧上。
60.本实施例中,两个接触部210贴合时两个凹槽211构成六角型腔以适配光纤接头等部件。光纤接头在现实生活中经常使用,通过在接触部210上设计出适配六角螺钉的凹槽211,能够有效确保在两个夹爪200相互靠近时,两个接触部210能够稳定夹持光纤接头,避免在装配过程中被动微调时从夹爪200上脱落,确保微调过程的稳定性。
61.需要说明的是,两个凹槽211贴合后所构成的形状不仅限于为六角型腔,根据实际需求,可以根据夹持的具体零件的形状进行定制化设计。
62.在某些实施例中,控制部230通过传动构件与机座100连接;传动构件包括主力臂410和辅助支架420,控制部230的上下两侧均与辅助支架420铰接,辅助支架420远离控制部230的上下两端均与机座100铰接;主力臂410与控制部230及机座100铰接,驱动电机300用于驱动主力臂410摆动;主力臂410、控制部230和辅助支架420在xz平面上构成平行四连杆机构,以使驱动电机300驱动主力臂410摆动时通过平行四连杆机构运动实现夹爪200在xz平面上平动。
63.传动构件主要用于控制两个夹爪200相互靠近或相互远离,从而实现夹持或放松的动作。本实施例中,主力臂410与驱动电机300连接,作为传动构件的主要动力输出,同时承担着夹爪200的重量,因此通过设置辅助支架420以分摊夹爪200的重量,同时与主力臂410形成平行四连杆机构实现两个夹爪200在xz平面上的平动。
64.在某些实施例中,主力臂410的形状呈“l”形;驱动电机300的输出端连接有丝杠310,丝杠310上套设有滑块320,滑块320可沿丝杠310的长度方向往复滑动;滑块320上安装有连杆330,连杆330与滑块320转动连接;主力臂410的一端套设在第一销轴430上,第一销轴430与连杆330铰接,以使滑块320沿丝杠310的长度方向滑动时,主力臂410受驱动力绕第一销轴430的轴线转动;
主力臂410的拐角一端套设在第二销轴440上,第二销轴440与机座100铰接,以使主力臂410受驱动电机300驱动时能绕第二销轴440的轴线转动;主力臂410的另一端套设在第三销轴450上,第三销轴450与控制部230铰接,以使主力臂410受驱动电机300驱动时能绕第三销轴450的轴线转动。
65.本实施例中,驱动电机300驱动滑块320沿丝杠的长度方向移动从而在各个机构配合作用下使主力臂410做出摆动动作,协同辅助支架420的运动实现夹爪200在xz平面上的平动。
66.在某些实施例中,驱动电机300内嵌在机座100内部。有利于保护驱动电机300,避免驱动电机300受碰撞或侵蚀导致损坏。
67.综上所述,虽然本发明已以优选实施例揭露如上,但上述优选实施例并非用以限制本发明,本领域的普通技术人员,在不脱离本发明的精神和范围内,均可作各种更动与润饰,因此本发明的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1