自动循环口腔器械取放装置及控制方法与流程
1.本发明涉及一种口腔器械包装装置,特别是公开一种自动循环口腔器械取放装置及控制方法。
背景技术:
2.目前的口腔器械盒在包装过程中,需要将口镜、镊子、探针等口腔器械放入同一个包装袋中进行包装。由于口腔器械盒涉及到多个领域的产品制造,因此,口腔器械的生产制造和最后的组合包装,是分开进行的。这就意味着,在进行组合包装时,需要将不同类型的器械产品,进行分拣后,再逐一将不同器械装入托盘和包装袋进行包装,这就造成了,包装的设备很难同时满足于不同物品的分拣、抓取和放置。同时,由于口腔器械的形状复杂,用现有的包装产品的机械设备,很难对口腔器械进行自动化取放和包装。因此,目前常用的方法是,通过人工将各个器械一个个分开,然后再依次放入包装托盘中进行包装封口,这样不仅效率低,还容易出现漏放、错放等问题。
技术实现要素:
3.本发明的目的在于克服现有技术中存在的缺陷,提供一种能够自动抓取和放置口腔器械,提高口腔器械盒包装效率的自动循环口腔器械取放装置及控制方法。
4.本发明是这样实现的:一种自动循环口腔器械取放装置,包括机架、分设置在机架上的器械盘分盘机构、三坐标行程机构和机械手,所述机架上依次设有器械盘叠放区、分盘放置区和接料区;所述器械盘分盘机构位于所述器械盘叠放区;所述器械盘分盘机构包括承料架组件和中间举架组件;所述承料架组件包括用于托住器械盘前后侧边缘的第一料架和第二料架,所述第一料架的一侧设有第一进退气缸,所述第一料架的下方设有第一升降气缸;所述第二料架的一侧设有第二进退气缸,所述第二料架的下方设有第二升降气缸;所述中间举架组件包括举料架、第三升降气缸、推料气缸,所述举料架位于所述器械盘的正下方,所述第三升降气缸位于所述举料架下方并与所述举料架的底部相连;所述推料气缸位于所述举料架的一侧,所述推料气缸上设有推料板,所述推料气缸带动所述推料板将所述举料架上的器械盘推动至分盘放置区;所述分盘放置区内设有单盘放置架,所述单盘放置架位于所述举料架的另一侧用于放置来自所述举料架的器械盘;所述三坐标行程机构包括能够带动所述机械手在所述分盘放置区上方和接料区上方之间来回移动的x轴向移动机构、能够带动所述述机械手前后移动的y轴向移动机构、以及能够带动所述机械手上下移动的z轴向移动机构。
5.所述x轴向移动机构包括x轴向电缸,所述y轴向移动机构包括y轴向电缸,所述z轴向移动机构包括z轴向电缸;所述x轴向电缸位于所述分盘放置区和接料区的上方,所述y轴向电缸与所述x轴向电缸的输出端相连,所述y轴向电缸的输出端与所述z轴向电缸相连,所
述z轴向电缸的输出端与所述机械手相连;所述x轴向电缸带动所述y轴向电缸、z轴向电缸和机械手在所述分盘放置区上方和接料区上方之间来回移动,所述y轴向电缸带动所述z轴向电缸和机械手在前后方向上来回移动,所述z轴向电缸带动所述机械手上下移动。
6.所述单盘放置架的下方或一侧设有升降机构。
7.所述第一升降气缸通过第一底板固定在所述机架上,所述第二升降气缸通过第二底板固定在所述机架上,所述第三升降气缸通过第三底板固定在所述机架上。
8.所述器械盘的一侧设有固定在机架上的定位板。
9.所述单盘放置架上设有与所述中间举架组件相连的用于检测所述单盘放置架上是否存在器械盘的红外传感器。
10.所述接料区内设有用于放置包装盒的物料托架;所述机械手从所述单盘放置架上的器械盘中抓取物料后移动至所述物料托架上方并将抓取的物料放置所述物料托架上的包装盒内。
11.一种如上所述的自动循环口腔器械取放装置的控制方法,包括如下步骤:s1、初始时,装有口腔器械的器械盘竖向叠放在所述第一料架和第二料架上;所述举料架与单盘放置架齐平;s2、启动所述中间举架组件进行分盘:第三升降气缸带动举料架上升、向上顶起器械盘使器械盘脱离第一料架和第二料架;第一进退气缸和第二进退气缸同时带动第一料架和第二料架向前后两侧移动,离开器械盘;第三升降气缸带动举料架下降至从下向上的第二个器械盘位的两侧边缘位于第一料架和第二料架水平承托范围内,所述第一进退气缸和第二进退气缸同时带动第一料架和第二料架向器械盘方向移动,托住从下向上的第二个器械盘位的两侧边缘;所述第三升降气缸带动举料架继续下降复位、至与单盘放置架齐平,此时,1个器械盘位于举料架上并离开上方的其余器械盘,其余器械盘位于所述第一料架和第二料架上;s3、所述推料气缸带动所述推料板将所述举料架上的1个器械盘推动至分盘放置区的单盘放置架,推料气缸复位;s4、所述x轴向移动机构和y轴向移动机构带动机械手至单盘放置架上方器械盘的预设目标坐标位置,z轴向移动机构带动机械手向下移动,机械手夹取器械盘中的口腔器械,z轴向移动机构带动机械手向上移动,x轴向移动机构和y轴向移动机构带动机械手至接料区上方的预设目标坐标位置,z轴向移动机构带动机械手向下移动并松开放置口腔器械;z轴向移动机构带动机械手上升复位;s5、重复步骤s4,直至单盘放置架上方器械盘内的口腔器械被取完,移去空的器械盘;进入步骤s1。
12.步骤s1之后、步骤s2之前还包括步骤s1.1:检测所述单盘放置架上是否有器械盘,如果有则中间举架组件保持不动,如果没有进入步骤s2。
13.步骤s1.1中通过红外传感器检测单盘放置架是否有器械盘。
14.本发明的有益效果是:通过器械盘分盘机构、三坐标行程机构和机械手,实现了器械盘自动分盘,并通过机械手自动抓取口腔器械的过程,避免了人工摆放造成器件的漏放和错放,确保包装所需器件的准确性。生产过程中无需停机直接添加器械盘,提高了效率。
附图说明
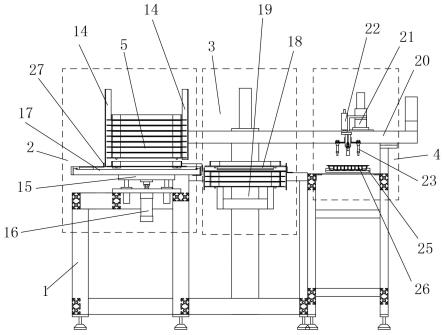
15.图1是本发明注视方向结构示意图。
16.图2是本发明俯视结构示意图。
17.图3是本发明分盘放置区内单盘放置架侧面的位置关系示意图。
18.图4是本发明器械盘分盘机构侧面的结构示意图。
19.其中:1、机架;2、器械盘叠放区;3、分盘放置区;4、接料区;5、器械盘;6、第一料架;7、第二料架;8、第一进退气缸;9、第一升降气缸;10、第二进退气缸;11、第二升降气缸;12、第一底板;13、第二底板;14、定位板;15、举料架;16、第三升降气缸;17、推料气缸;18、单盘放置架;19、升降机构;20、x轴向电缸;21、y轴向电缸;22、z轴向电缸;23、机械手;24、第三底板;25、物料托架;26、包装盒;27、推料板。
具体实施方式
20.根据图1~图4,本发明一种自动循环口腔器械取放装置,包括机架1、分设置在机架1上的器械盘分盘机构、三坐标行程机构和机械手,所述机架1上依次设有器械盘叠放区2、分盘放置区3和接料区4。
21.所述器械盘分盘机构位于所述器械盘叠放区2;所述器械盘分盘机构包括承料架组件和中间举架组件。所述承料架组件包括用于托住器械盘5前后侧边缘的第一料架6和第二料架7,所述第一料架6的一侧设有第一进退气缸8,所述第一料架6的下方设有第一升降气缸9;所述第二料架7的一侧设有第二进退气缸10,所述第二料架7的下方设有第二升降气缸11。所述第一升降气缸9通过第一底板12固定在所述机架1上,所述第二升降气缸11通过第二底板13固定在所述机架1上。所述器械盘5的一侧设有固定在机架1上的定位板14,所述定位板14用于在叠放器械盘5时进行位置参考定位,方便器械盘5叠放整齐,所述定位板14优选垂直设置在机架上的靠版。
22.所述中间举架组件包括举料架15、第三升降气缸16、推料气缸17,所述举料架15位于所述器械盘5的正下方,所述第三升降气缸16位于所述举料架15下方并与所述举料架15的底部相连;所述推料气缸17位于所述举料架15的一侧,所述推料气缸17上设有推料板27,所述推料气缸17带动所述推料板27将所述举料架15上的器械盘推动至分盘放置区;所述第三升降气缸16通过第三底板24固定在所述机架上。
23.所述分盘放置区3内设有单盘放置架18,所述单盘放置架18位于所述举料架15的另一侧,用于放置来自所述举料架15的器械盘。所述单盘放置架18的下方或一侧设有升降机构19,所述升降机构19优选升降气缸。
24.所述单盘放置架上设有与所述中间举架组件相连的用于检测所述单盘放置架上是否存在器械盘的红外传感器。
25.所述三坐标行程机构包括能够带动所述机械手在所述分盘放置区上方和接料区上方之间来回移动的x轴向移动机构、能够带动所述述机械手前后移动的y轴向移动机构、以及能够带动所述机械手上下移动的z轴向移动机构。具体的,所述x轴向移动机构包括x轴向电缸20,所述y轴向移动机构包括y轴向电缸21,所述z轴向移动机构包括z轴向电缸22;所述x轴向电缸20位于所述分盘放置区3和接料区4的上方,所述y轴向电缸21与所述x轴向电缸20的输出端相连,所述y轴向电缸21的输出端与所述z轴向电缸22相连,所述z轴向电缸22
的输出端与所述机械手23相连;所述x轴向电缸20带动所述y轴向电缸21、z轴向电缸22和机械手23,在所述分盘放置区3上方和接料区4上方之间来回移动;所述y轴向电缸21带动所述z轴向电缸22和机械手23在前后方向上来回移动,所述z轴向电缸22带动所述机械手23上下移动。
26.所述接料区4内设有用于放置包装盒的物料托架25;所述机械手23从所述单盘放置架18上的器械盘中抓取物料后移动至所述物料托架25上方,并将抓取的物料放置在所述物料托架25上的包装盒26内。
27.一种如上所述的自动循环口腔器械取放装置的控制方法,包括如下步骤:s1、初始时,装有口腔器械的器械盘5竖向叠放在所述第一料架6和第二料架7上;所述举料架15与单盘放置架18齐平。
28.s2、启动所述中间举架组件进行分盘:第三升降气缸16带动举料架15上升、向上顶起叠放的器械盘5使器械盘脱离第一料架6和第二料架7;第一进退气缸8和第二进退气缸10同时带动第一料架6和第二料架7向前后两侧移动,离开器械盘5;第三升降气缸16带动举料架15下降至:从下向上的第二个器械盘位的两侧边缘、位于第一料架6和第二料架7水平承托范围内,所述第一进退气缸8和第二进退气缸10同时带动第一料架6和第二料架7向器械盘5方向移动,托住从下向上的第二个器械盘位的两侧边缘;所述第三升降气缸16带动举料架15继续下降复位、至与单盘放置架18齐平,此时,1个器械盘位于举料架15上并离开上方的其余器械盘,其余器械盘位于所述第一料架6和第二料架7上。
29.s3、所述推料气缸17带动所述推料板27将所述举料架15上的1个器械盘推动至分盘放置区3的单盘放置架18上,推料气缸17带动所述推料板27复位。
30.s4、所述x轴向移动机构和y轴向移动机构带动机械手23至单盘放置架18上方器械盘的预设目标坐标位置,z轴向移动机构带动机械手23向下移动,机械手23夹取器械盘中的口腔器械,z轴向移动机构带动机械手23向上移动,x轴向移动机构和y轴向移动机构带动机械手23至接料区4上方的预设目标坐标位置,z轴向移动机构带动机械手23向下移动并松开放置口腔器械;z轴向移动机构带动机械手23上升复位。其中,所述x轴向移动机构包括x轴向电缸20,所述y轴向移动机构包括y轴向电缸21,所述z轴向移动机构包括z轴向电缸22。
31.s5、重复步骤s4,直至单盘放置架18上方器械盘内的口腔器械被取完,移去空的器械盘;进入步骤s1。
32.优选的,在步骤s1之后、步骤s2之前,还包括步骤s1.1:通过红外传感器检测所述单盘放置架18上是否有器械盘,如果有则中间举架组件保持不动,如果没有进入步骤s2。
33.本发明通过器械盘分盘机构、三坐标行程机构和机械手,实现了器械盘自动分盘,并通过机械手自动抓取口腔器械的过程,避免了人工摆放造成器件的漏放和错放,确保包装所需器件的准确性。生产过程中无需停机直接添加器械盘,提高了效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1