一种基于人工智能技术的家庭中医理疗机器人
1.本发明涉及机器人领域,具体是一种基于人工智能技术的家庭中医理疗机器人。
背景技术:
2.2021年人口普查结果显示,60岁及以上人口为26402万人,占18.70%,且高龄老年人以每年5%的速度增长,目前中国已成为老年型人口国家。根据一项针对5600位老年人的一次健康调研显示,大部分老年人有肩颈腰腿疼、脚病等健康问题,而且大多数子女因外出工作而无法陪伴老年人,不仅无法帮助老年人缓解上述健康问题。随着老龄化加剧造成的我国医疗保健资源短缺,老年人的陪护、患病治疗已成为社会亟待解决的一大难题。
3.老年人常常患有综合慢性疾病,如肩周炎、关节炎等。综合慢性疾病治疗周期长,老年人出行不便,并且随着老龄化加剧造成的我国医疗保健资源短缺,老年人的综合慢性疾病治疗已成为社会急需解决的一大难题。同时,子女长期在外工作,无法时刻陪伴老年人,造成许多老年人充满孤独感,精神状态变差。虽然目前市面上已有推拿、针灸、把脉机器人售卖,但普遍存在不便于居家使用,功能单一、造价昂贵,不便于老年人使用等问题。
技术实现要素:
4.本发明的目的在于提供一种基于人工智能技术的家庭中医理疗机器人,它集多种中医理疗功能于一体,能够实现智能语音交互、实时健康检测、便于老人使用。
5.本发明为实现上述目的,通过以下技术方案实现:
6.主体结构包括机器人本体、运动控制系统、穴位自动识别系统、智能语音交互系统、健康监测管理系统以及数字地图重构系统,所述机器人本体包括行驶系统、针灸拔罐系统以及机械臂系统,所述运动控制系统、穴位自动识别系统、智能语音交互系统、健康监测管理系统以及数字地图重构系统均内置于机器人本体并对行驶系统、针灸拔罐系统以及机械臂系统进行控制。
7.优选的,所述运动控制系统包括智能集成控制设备并设置有功能控制面板,所述控制面板安装在机器人本体外表面。
8.优选的,所述穴位自动识别系统为通过3d视觉系统收集视觉3d深度数据并利用canny边缘检测算法得到人体背部上下边缘曲线构建人体模型。
9.优选的,所述智能语音交互系统为一种基于天猫精灵实现ai控制的设备,所述设备接受用户的语音需求并将语音需求转化为数字信号后发送给无线路由器,所述无线路由器再将信号传输给云端服务器并接受云端服务器处理后的数字信号再将该数字信号传输给设备中基于天猫精灵的控制系统。
10.优选的,所述健康监测管理系统将通过图像识别与已有数据库进行比对提取病例相关特征词并对特征词进行预处理后利用神经网络并设置阈值生成诊断结果,进而自动给出调理方案。
11.优选的,所述数字地图重构系统包括可旋转的激光发射头和配套接收器,所述激
光遇到障碍物反射被接收器探测到后自动计算机器人所在位置与障碍点之间的距离,并通过slam算法进行同步定位并建立数字地图。
12.优选的,所述行驶系统包括底部矩形支撑板,所述支撑板的前端和后端分别设置有转向辅助装置,所述转向辅助装置末端固定连接有第一稳定块,所述第一稳定块通过螺栓与第一连杆可转动栓连,所述第一连杆的末端通过螺栓与第二稳定块可转动栓连,所述第二稳定块上固定连接有转动轮和电机,所述第一稳定块与第二稳定块之间设置有减震装置。
13.优选的,所述针灸拔罐系统包括圆饼状第一固定板,所述第一固定板的底面中心位置可转动的连接有蜗杆,所述蜗杆的四周对称配合有4个蜗轮,所述蜗轮上分别固定连接有弯折臂,所述弯折臂的底端构成夹角且设有圆孔,所述蜗杆的底端固定连接有第二固定板,所述第二固定板的底面上固定连接圆杆,所述圆杆的底端固定安装有托板,所述托板的上表面沿圆周方向均匀设置有存针管,所述第二固定板的底面上设置有螺杆,所述螺杆的底端与存针管转动连接。
14.优选的,所述机械臂系统包括两条多关节机械臂,所述多关节机械臂的其中一条的末端可转动的连接针灸拔罐系统,所述多关节机械臂的另一条的末端设置有设置有第三固定板,所述第三固定板的底面固定安装有螺杆,所述螺杆的底部可转动栓连有滑块,所述滑块相对称的两个侧面上分别设有凹槽,所述凹槽内分别铰接有第二连杆,所述第三固定板的底面铰接有第三连杆,所述第三连杆的中间部分与第二连杆铰接,所述第三连杆的末端铰接有机械手指,所述机械手指之间可转动连接有带有凸起的滚动轴,所述第三固定板的顶面设置有气压杆,所述气压杆与机械手指连接。
15.对比现有技术,本发明的有益效果在于:
16.该机器人外观设计精致、小巧可爱,采用弧形设计降低视觉攻击性,适合家用。用于按摩的机械臂材质柔软,接近人体真实肌肤触感,改善使用体验感。机器人右机械臂集刮痧、针灸灸、拔罐等功能于一体,左机械臂实现按摩等功能。不仅如此,机器人还可以通过摄像头对图像预处理后进行图像识别,基于物联网与大数据进行深度学习,自动给出诊断结果和调理建议。
17.基于健康检测管理系统,在每次理疗后对健康检测管理系统的数据进行实时更新,以实现用户数据的动态化管理。基于数字地图重构系统,用户能够通过语音控制机器人到达指定地点,并调整至适宜的高度进行理疗服务。在中医理疗服务完成后,机器人通过数字地图重构系统自动规划最短返航路径,节约环保。基于智能语音交互系统,用户在接受理疗服务的同时可以通过智能语音交互系统实现控制播放音乐,与家人语音通话等功能,使理疗过程更加轻松愉悦,填补了用户的情感需求。
附图说明
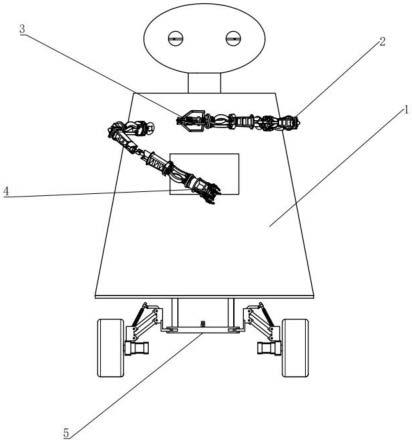
18.图1是机器人的主视图。
19.图2是行驶系统的结构示意图。
20.图3是针灸拔罐系统的主视图。
21.图4是按摩手的主视图。
22.图5是按摩手的侧视图。
23.图6是机器人的系统逻辑图。
24.图中所示标号:
25.1、机器人本体;2、多关节机械臂;3、针灸拔罐系统;4、按摩手;5、行驶系统;6、支撑板;7、减震装置;8、第一稳定块;9、第一连杆;10、第二稳定块;11、转动轮;12、电机;13、转向辅助装置;14、第一固定板;15、第二固定板;16、托板;17、蜗杆;18、蜗轮;19、弯折臂;20、存针管;21、第一螺杆;22、圆孔;23、第三固定板;24、第二螺杆;25、气压杆;26、滑块;27、机械手指;28、第三连杆;29、第二连杆;30、滚动轴。
具体实施方式
26.下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
27.实施例:一种基于人工智能技术的家庭中医理疗机器人
28.包括机器人本体、运动控制系统、穴位自动识别系统、智能语音交互系统、健康监测管理系统以及数字地图重构系统,所述机器人本体包括行驶系统、针灸拔罐系统以及机械臂系统,所述运动控制系统、穴位自动识别系统、智能语音交互系统、健康监测管理系统以及数字地图重构系统均内置于机器人本体并对行驶系统、针灸拔罐系统以及机械臂系统进行控制,所有运行的系统通过电联和网线进行连接配合,进而使得机器人本体可以受使用者控制并进行学习,从而达到家用智能水平。
29.为了能够控制机器人本体进行工作,所述运动控制系统包括智能集成控制设备并设置有功能控制面板,所述控制面板安装在机器人本体外表面,用户可以与其进行交互,选取治疗功能,还可以设置治疗的数据和参数,例如,设置用户需要治疗的穴位、治疗的温度、治疗的电流等。机器人收到指令后,通过机械结构调动对应机械臂运作,进行理疗服务。
30.为了能够使机器人能够实现对患者患处的精准按摩、针灸或者拔罐,所述穴位自动识别系统为通过3d视觉系统收集视觉3d深度数据并利用canny边缘检测算法得到人体背部上下边缘曲线构建人体模型,对人体模型图像进行预处理后,扫描标准人体模型的穴位图,获取预设穴位参考图像,将用户人体模型与标准人体模型进行匹配,识别用户人体模型图像特征中的穴位名称及对应位置,实现精准识别穴位,提高安全性和中医理疗效果。
31.为了能实现患者与机器人进行更好的交互,所述智能语音交互系统为一种基于天猫精灵实现ai控制的设备,所述设备接受用户的语音需求并将语音需求转化为数字信号后发送给无线路由器,所述无线路由器再将信号传输给云端服务器并接受云端服务器处理后的数字信号再将该数字信号传输给设备中基于天猫精灵的控制系统,控制机器人做出相应的指令,让用户可以自主选择理疗服务,同时,用户在接受理疗服务的同时,可以通过语音交互系统实现控制播放音乐,与家人语音通话等功能,填补了用户的情感需求。
32.为了能够使患者能够清楚了解自己的病情以及相关的治疗方案,所述健康监测管理系统将通过图像识别与已有数据库进行比对提取病例相关特征词并对特征词进行预处理后利用神经网络并设置阈值生成诊断结果,进而自动给出调理方案,本系统通过“物联”将用户理疗结果、频次、强度进行记录,建立动态化健康管理数据库,并基于数据分析量身定制调理计划,让用户更全面的了解自身的身体状况,从而实现健康监护、维护健康的目
的。
33.为了能让机器人更好的在家庭环境中更好的对患者进行服务,所述数字地图重构系统包括可旋转的激光发射头和配套接收器,所述激光遇到障碍物反射被接收器探测到后自动计算机器人所在位置与障碍点之间的距离,并通过slam 算法进行同步定位并建立数字地图,还能根据家中物体摆放位置的变化进行地图更新。当用户发出语音指令,机器人自动识别当前位置与指定地点,最后由最短路径算法规划移动路径,实现智能避障,并且在到达指定位置后可以根据座椅的高低自动升降,调整到合适的位置进行服务。同时,在理疗完成后,机器人自动规划最短返航路径,实现自动返航充电。
34.为了可以让机器人在家庭环境中行进的顺畅,所述行驶系统包括底部矩形支撑板,所述支撑板的前端和后端分别设置有转向辅助装置,所述转向辅助装置末端固定连接有第一稳定块,所述第一稳定块通过螺栓与第一连杆可转动栓连,所述第一连杆的末端通过螺栓与第二稳定块可转动栓连,所述第二稳定块上固定连接有转动轮和电机,所述第一稳定块与第二稳定块之间设置有减震装置,四组电机同时对转动轮进行驱动,做到转速与方向同步,辅助转向装置同时对第一稳定块进行驱动使得机器人本体转向更加顺畅。
35.为了使机器人本体具有针灸拔罐的功能,所述针灸拔罐系统包括圆饼状第一固定板,所述第一固定板的底面中心位置可转动的连接有蜗杆,所述蜗杆的四周对称配合有4个蜗轮,所述蜗轮上分别固定连接有弯折臂,所述弯折臂的底端构成夹角且设有圆孔,所述蜗杆的底端固定连接有第二固定板,所述第二固定板的底面上固定连接圆杆,所述圆杆的底端固定安装有托板,所述托板的上表面沿圆周方向均匀设置有存针管,所述存针管与其中一条弯折臂贯通连接,所述第二固定板的底面上设置有第一螺杆,所述第一螺杆的底端与存针管转动连接,蜗杆转动时与之配合的蜗轮进行转动,从而带动弯折臂收缩或者张开,当张开时可将气压罐的顶端放置于弯折臂中间,控制弯折臂收缩夹紧气压罐,从而实现对患者的拔罐治疗;将针灸用的针放置于存针管中,通过转动第一螺杆,使得针灸用针穿过弯折臂对患处进行针灸。
36.为了能使机器人可以控制针灸拔罐以及按摩装置,所述机械臂系统包括两条多关节机械臂,所述多关节机械臂的其中一条的末端可转动的连接针灸拔罐系统,所述多关节机械臂的另一条的末端设置有设置有第三固定板,所述第三固定板的底面固定安装有第二螺杆,所述第二螺杆的底部可转动栓连有滑块,所述滑块相对称的两个侧面上分别设有凹槽,所述凹槽内分别铰接有第二连杆,所述第三固定板的底面铰接有第三连杆,所述第三连杆的中间部分与第二连杆铰接,所述第三连杆的末端铰接有机械手指,所述机械手指之间可转动连接有带有凸起的滚动轴,所述第三固定板的顶面设置有气压杆,所述气压杆与机械手指连接,第二螺杆转动时同时控制滑块进行上下滑动,滑块继而带动第二连杆运动,从而控制第三连杆进行自内向外或者自外向内运动,可以实现局部反复按摩,气压杆可以对机械手指进行控制,实现手指的上翻和下放。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1