一种触觉单元
1.本发明涉及触觉反馈装置领域,特别是涉及一种触觉单元。
背景技术:
2.近年来,由于裸手交互的自然性较高以及虚拟现实技术的发展,可供裸手进行触摸及操作的触觉单元研究越来越多。而现阶段的触觉单元大多用于实现温度、纹理等单一触觉感受的呈现,而缺乏对于物体3d形状及刚度融合呈现。另外,现有触觉单元实现方式多采用刚性材料,体积较大,交互体验较差,无法实现触觉单元多自由度角度控制、表面刚度控制及二者的融合呈现,主要体现在以下两个方面:
3.(1)触觉单元角度的控制通常采用刚性驱动器进行驱动,但受限于刚性驱动器的体积,触觉单元的体积通常会比较大,并且由于刚性驱动器的输出力及力矩较大,这导致人与触觉单元之间的交互性较差。
4.(2)触觉单元对于刚度的控制通常采用气动进行控制,对于角度的控制通常采用刚性驱动方式进行控制,如线驱动、直线电机驱动,但由于刚度及角度控制的设备较为复杂,这导致触觉单元实现对刚度及角度控制的融合呈现较为困难。
5.因此,亟需研发一种体积较小,可以实现角度及刚度变化的触觉单元,以满足对于小型触觉单元角度及刚度呈现的需求。
技术实现要素:
6.本发明的目的是提供一种触觉单元,具有体积小、角度可变和刚度可变的特点。
7.为实现上述目的,本发明提供了如下方案:
8.一种触觉单元,包括:粒子阻塞模块、三自由度软体驱动器以及气动装置;所述粒子阻塞模块与所述三自由度软体驱动器的端部连接;
9.所述粒子阻塞模块在硅胶外壁形成的封闭内腔内填充填充材料;所述粒子阻塞模块的封闭内腔通过第一气管与所述气动装置连通;
10.所述三自由度软体驱动器包括:三个腔室;每个所述腔室通过第二气管与所述气动装置连通;
11.所述气动装置用于控制所述粒子阻塞模块内部的气压和每一所述腔室内部的气压;
12.所述粒子阻塞模块用于根据所述粒子阻塞模块的封闭内腔内的气压变化进行表面刚度的变化;
13.所述三自由度软体驱动器用于根据每一所述腔室内部的气压变化进行3个自由度的运动。
14.可选地,所述填充材料包括:石英砂、咖啡渣或塑料片。
15.可选地,所述三自由度软体驱动器包括:驱动器外壁;
16.所述驱动器外壁包围三个所述腔室。
17.可选地,所述三自由度软体驱动器还包括:纤维丝;
18.所述纤维丝分别缠绕在三个所述腔室外壁;所述纤维丝用于限制所述腔室的径向膨胀。
19.可选地,所述气动装置包括:负压泵和正压泵;
20.所述负压泵与所述粒子阻塞模块的封闭内腔连通;
21.所述正压泵与所述每个所述腔室连通。
22.可选地,利用硅胶浇筑的方法完成所述的触觉单元的一体化制作过程。
23.根据本发明提供的具体实施例,本发明公开了以下技术效果:
24.本发明所提供的一种触觉单元,利用通过三自由度软体驱动器体积小,运动范围广的特点,控制触觉单元的弯曲角度及高度,利用粒子阻塞模块可以通过气动改变刚度的特点,控制触觉单元表面的软硬。实现了对于触觉单元表面角度及刚度的融合呈现,具有触觉单元体积小,角度、刚度控制精度高,融合呈现效果好的特点。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
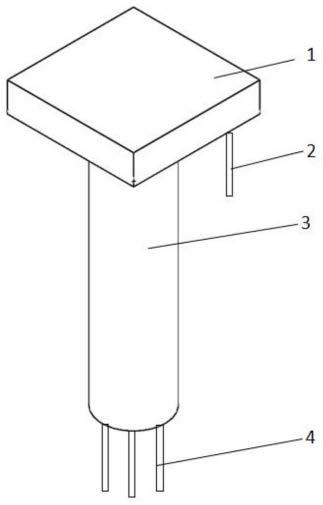
26.图1为本发明所提供的一种触觉单元结构示意图;
27.图2为粒子阻塞模块结构示意图;
28.图3为三自由度软体驱动器截面结构示意图;
29.图4为触觉单元工作原理示意图((a)为三个腔室气压相同,(b)为三个腔室气压不相同,(c)为粒子阻塞模块无负压,(d)为粒子阻塞模块有负压);
30.图5为触觉单元制造工艺示意图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明的目的是提供一种触觉单元,具有体积小、角度可变和刚度可变的特点。
33.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
34.图1为本发明所提供的一种触觉单元结构示意图,如图1所示,本发明所提供的一种触觉单元,包括:粒子阻塞模块1、三自由度软体驱动器3以及气动装置;所述粒子阻塞模块1与所述三自由度软体驱动器3的端部连接;
35.如图2所示,所述粒子阻塞模块1在硅胶外壁5形成的封闭内腔内填充填充材料6;所述粒子阻塞模块1的封闭内腔通过第一气管2与所述气动装置连通;
36.如图3所示,所述三自由度软体驱动器3包括:三个腔室7;每个所述腔室7通过第二
气管4与所述气动装置连通;
37.所述气动装置用于控制所述粒子阻塞模块1内部的气压和每一所述腔室7内部的气压;
38.所述粒子阻塞模块1用于根据所述粒子阻塞模块1的封闭内腔内的气压变化进行表面刚度的变化;
39.所述三自由度软体驱动器3用于根据每一所述腔室7内部的气压变化进行3个自由度的运动。
40.所述气动装置包括:负压泵和正压泵;
41.所述负压泵与所述粒子阻塞模块1的封闭内腔连通;
42.如图4(c)和图4(d)所示,当人想要触摸柔软表面时,此时负压泵不进行工作,填充材料6粒子间处于相对松散的状态,此时填充材料6粒子间的摩擦力较小,整体刚度较小,当人想要触摸坚硬表面时,此时负压泵开始工作,填充材料6粒子受到挤压,填充材料6粒子间摩擦力增大,整体刚度变大,从而实现了表面刚度的变化。
43.所述正压泵与所述每个所述腔室7连通。
44.如图4(a)和图4(b)所示,每个腔室7中适当的压力控制可以实现3个自由度的运动,即在任意方向上弯曲和拉伸。当正压泵不工作时,驱动器处于初始竖直状态,当正压泵工作时,内部空腔发生膨胀。若此时三空腔的气压相同时,三空腔的轴向膨胀相同,此时驱动器仅发生轴向伸长,引起触觉单元表面高度发生变化;当三腔道气压不同时,三空腔的轴向膨胀不同,此时驱动器发生向四周的弯曲,引起触觉单元表面发生弯曲。
45.所述三自由度软体驱动器3包括:驱动器外壁9;
46.所述驱动器外壁9包围三个所述腔室7。
47.所述三自由度软体驱动器3还包括:纤维丝8;
48.所述纤维丝8分别缠绕在三个所述腔室7外壁;所述纤维丝8用于限制所述腔室7的径向膨胀。
49.所述填充材料6包括但不限于:石英砂、咖啡渣或塑料片。
50.若填充石英砂或咖啡渣等粒子,那么刚度变化范围较大,但粒子存在不均匀情况;若采用塑料片等薄片,那么刚度变化范围较小,但模块较为稳定。
51.三自由度软体驱动器3的材料、截面积、长度不唯一,通过改变以上参数,可以改变驱动器的运动性能及输出力学性能,并决定了最终触觉单元所能呈现的角度及高度变化范围。若对角度变化范围较大,那么驱动器硅胶材料较软,截面积较大,长度较长;若对最终形状保持性能有一定要求,那么驱动器硅胶材料较硬,截面积较小,长度较短。
52.利用硅胶浇筑的方法完成所述粒子阻塞模块1与所述三自由度软体驱动器3的端部连接。
53.如图5所示,首先,将硅胶(dragon skin 10)搅拌均匀,倒入3d打印模具中,完成三个腔体的浇筑。随后,将三个腔体分别缠绕纤维丝8,以限制腔体的径向变形,增加其驱动能力,将3个制作完成的腔体放入模具2中,将硅胶(dragon skin 10)搅拌均匀,倒入模具2中进行浇筑,完成整体三自由度软体驱动器3的浇筑。进一步,将驱动器中间的细棒取出,倒转驱动器,在其上部插入导管,并放入模具3中,将硅胶(dragon skin 10)搅拌均匀,倒入模具3顶部及底部小孔进行浇筑,以实现对驱动器整体的一体化浇筑,保证其对于气体的密封性
能,完成驱动器密封和粒子阻塞模块1底部的浇筑。将硅胶(dragon skin 10)搅拌均匀,倒入模具4中,浇筑完成后,得到粒子阻塞模块1外壁,在外壁中填充满石英砂,将驱动器与粒子阻塞模块1用模具5固定,将硅胶(dragon skin 10)搅拌均匀,倒入模具5上盖的小孔中,完成粒子阻塞模块1的密封,最终实现了驱动器与粒子阻塞模块1的结合,完成了触觉单元的制造。
54.利用多步浇筑过程,完成了纯软体机构的触觉单元的一体化制作过程,一定程度上解决了触觉单元漏气的问题(如三自由度软体驱动器3与气管之间的连接,粒子阻塞模块1与气管之间的连接)。整个过程均利用硅胶浇筑完成,极大程度上避免了气动漏气问题,解决了触觉单元制造困难的问题。
55.本发明所述的触觉单元采用全柔性化的方式进行制造,极大的减小了驱动器的体积,与此同时,全柔性化的设计也极大地增加了人与触觉单元交互的效果。
56.此外,通过改变三自由度软体驱动器3的材料、截面积尺寸、长度等参数,可以改变可变角度的范围;通过改变粒子阻塞模块1内部填充材料6,可以改变刚度变化范围及稳定性。因此用户可以根据需求制作不同的触觉单元。
57.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1