个人护理装置的制作方法
1.本发明涉及一种个人护理装置,具体为毛发去除装置诸如电动剃刀,该个人护理装置包括用于对身体表面实现个人护理处理的工作头、用于沿身体表面移动工作头的柄部、和用于调节工作头和/或其零件的机械设置和/或机械功能的调节装置。
背景技术:
2.个人护理装置广泛用于向用户施加不同类型的个人护理处理,其中此类个人护理装置可包括毛发去除装置,诸如脱毛器、剃刀或剃须刀,其可以是电动的或手动的和/或湿法的或干法的,或者胡须修剪器。此外,具有此类工作头的其它个人护理装置包括牙科护理器具,诸如电动或手动牙刷、齿间清洁器或齿龈按摩装置、或皮肤处理装置,诸如按摩装置或振动器。
3.为了提高个人护理处理的效率和工作结果,工作头和/或其零件,诸如切割工具、剃刮刀片或刀架,可以相对于柄部和/或相对于工作头的其它部件可移动地支撑,以便允许更好地适配皮肤轮廓。例如,整个工作头可以相对于柄部围绕/沿着各种轴枢转和/或旋转和/或转动。还已经建议,允许切割器架相对于彼此和/或相对于工作头框架的附加枢转和/或旋转和/或转动运动,以便进一步增强轮廓适配。已知针对其它个人护理装置的类似移动性。
4.取决于用户的个人偏好并且取决于工作/操作场景,可能期望修改工作头的机械设置和/或机械功能,诸如限制枢转/旋转范围或增加/减小刚度。例如,现有技术参考ep 3 546 153 a1公开了一种具有多个传感器的电动剃刀,该多个传感器用于检测用户的行为,以便区分自然行为与非自然行为,其中响应于对用户行为的此类检测,调节工作头的机械设置,以更好地使剃刀的操作行为贴合用户的偏好。
5.响应于所检测到的用户图案的机械设置的此类调节当然有助于改进工作结果,但可能对其它目标(诸如个人护理装置的安全、磨损和撕裂)或能量效率有害。
技术实现要素:
6.本发明的一个目的是提供一种避免现有技术的至少一个缺点和/或进一步发展现有的解决方案的改进的个人护理装置。
7.本发明的更具体的目的是,提供一种经改进的个人护理装置,该个人护理装置具有增加的弹性和延长的寿命周期。
8.本发明的另一目的是,个人护理装置的结构部件(诸如工作头或驱动单元或其它机械致动单元)的经改进的耐久性。
9.为了实现前述目的中的至少一个目的,建议工作头和其零件的机械设置和/或机械功能的可调节性的使用不仅用于将工作处理调节到用户偏好和用户行为,而且在调节此类机械设置和/或机械功能时遵循个人护理装置的需要。更具体地,修改工作头和/或其零件的机械设置和/或机械功能和/或电子或电机设置,以保护个人护理装置免受损坏和/或
过早磨损和撕裂。
10.根据一个方面,个人护理装置可以包括危险确定装置,该危险确定装置用于确定针对个人护理装置的危险,其中调节装置可以被配置成响应于来自危险确定装置的危险信号而将工作头和/或其零件调节为安全机械设置和/或安全机械功能。当确定危险情况时,调节装置被自动激活和/或去激活和/或控制,以实现工作头的机械设置和/或机械功能的保护配置。
11.例如,危险确定装置可以包括坠落或自由下落确定模块,该坠落或自由下落确定模块用于确定个人护理装置坠落或自由下落到地板或其它表面上,个人护理装置在撞击地板或其它表面时将可能遭到损坏。
12.除此之外或另选地,危险确定装置可以被配置成当个人护理装置经受异常高或异常低的温度和/或个人护理装置的部件中的一者变得异常热和/或异常冷时,发出危险信号。
13.从参考附图和可能的示例的以下描述中,这些和其它优点变得更加明显。
附图说明
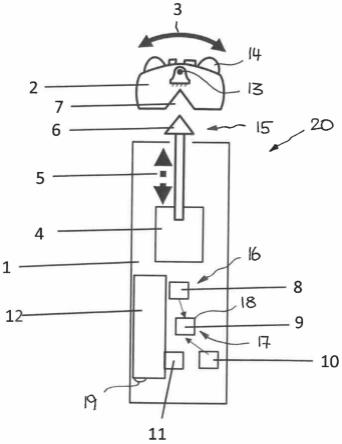
14.图1:电动剃刀方面的个人护理装置的侧视图,该电动剃刀包括柄部和可枢转地连接到该柄部的剃刀头,其中可以相应地调节和限制剃刀头的所允许的枢转或旋转范围。
具体实施方式
15.根据一个方面,工作头和/或其零件的机械设置和/或机械功能的可调节性用于保护工作头和/或整个个人护理装置免受危险场景的影响,并且保护个人护理装置免受外部冲击和/或操作危险的损坏。个人护理装置可以包括危险确定装置,该危险确定装置用于确定针对个人护理装置的危险,其中调节装置可以被配置成响应于来自危险确定装置的危险信号而将工作头和/或其零件调节为安全机械设置和/或安全机械功能,该危险信号指示对装置的完整无缺和/或结构整体性构成风险的场景。当确定危险情况时,调节装置自动进入保护配置,并且工作头自动调节成保护机械设置和/或保护机械功能,以保护工作头和/或个人护理装置的一部分免受损坏。
16.为了使工作头进入此类保护机械设置和/或功能,可以根据调节装置的结构和功能,以特定方式激活或去激活和/或控制调节装置。例如,当调节装置被配置成提供用于处于其非操作状态的保护机械设置时,可以响应于危险信号而去激活调节装置。此类去激活可以在个人护理装置的使用期间实现,即当打开个人护理装置时,和/或尽管用户可响应于危险信号而驳回针对不同设置的请求时。另一方面,当调节装置需要通电以提供保护设置时,可以激活该调节装置。更一般地,控制调节装置以在接收到来自危险确定装置的危险信号时提供保护设置和/或保护功能。
17.调节装置可以调节个人护理装置的至少一个工作参数,并且/或者其设置可以改变,以便响应于危险信号而提供保护机械设置和/或机械功能。此类机械设置或功能可以包括工作头相对于柄部的可移动性和/或工作头的零件相对于工作头基部零件或工作头的其它元件的移动性。除此之外或另选地,待受调节装置影响的机械设置和/或功能可以包括操作一个或多个工作工具(诸如长发切割器或短发切割器或其组合)和/或工作工具相对于其
它工具的位置,和/或操作用于将润滑剂施加到待处理的主体部分的润滑剂施加器。
18.更具体地,个人护理装置可以具有其工作头的可枢转悬架以允许工作头相对于柄部围绕至少一个轴枢转和/或旋转,其中调节机构可以被配置成调节工作头悬架的枢转刚度和/或工作头抵抗枢转和/或旋转运动的阻力和/或不情愿性,以便一方面为个人护理装置赋予更少轮廓适配处理,并且另一方面赋予更舒适的、更平稳的处理。更具体地,调节机构可以改变用于使工作头相对于柄部枢转和/或实现工作头从其中间位置改变的某个枢转角度所需的扭矩和/或力。
19.以类似的方式,工作头的一个或多个元件,诸如毛发切割器架,可以通过工作头可枢转地悬挂在整个工作头相对于柄部的除可枢转悬架之外或其替代形式中。调节机构可以改变此类可枢转元件的枢转刚度和/或其抵抗枢转运动的阻力和/或不情愿性。
20.为了实现针对此类可枢转悬挂的工作头和/或可枢转支撑的工作头元件的保护设置,可以控制调节机构,例如响应于来自危险确定装置的危险信号而去激活,以便提供减小的枢转刚度和/或增加的枢转情愿性。
21.另选地或除可枢转悬架之外,工作头和/或其元件诸如切割器架可以相对于柄部和/或相对于工作头的其它元件支撑,使得工作头可以相对于柄部转动,并且工作头元件可以沿着基本上垂直于工作头的皮肤接触轮廓和/或垂直于待处理的皮肤表面的轴而相对于其它工作头元件转动。对于此类转动运动,调节装置可以被配置成修改转动刚度和/或抵抗转动运动的阻力。更具体地,调节装置可以改变使工作头和/或其元件沿着此类轴转动和/或实现一定转动距离所需的力。
22.当工作头设置有此类转动悬架时,调节装置可以被控制,特别是被去激活,以便响应于危险信号而使转动悬架进入最具弹性或柔性的配置中,从而允许容易地使用最小的所需力来转动。
23.另选地或除调节枢转和/或转动刚度之外,调节装置可以被配置成调节工作头和/或其可移动元件的角度枢转范围和/或转动范围,以允许更大或更小的最大角度位移和/或更大或更小的最大转动位移。可以在操作期间使用此类可变枢转范围和/或转动范围,以在最大可用枢转角度或转动位移较小或具有较大旋转阻力时为个人护理装置提供较低的轮廓适配能力,而另一方面,用较大的最大枢转角度和/或较大的最大转动范围提供更舒适、更平滑的感觉。
24.为了实现保护机械设置,调节装置可以被控制,特别是被去激活,以便当危险确定装置发出危险信号时,使最大可能角度位移和/或最大可能转动位移可用于工作头和/或其可移动元件。
25.不仅为了保护工作头,而且还保护调节机构,危险信号的另一种可能的反应可以包括使调节机构进入安全港配置中。更具体地,当确定危险场景时,调节机构的致动器可以进入安全位置。例如,调节机构或其调节元件诸如致动器可以与工作头和/或与可调节的工作头元件脱离。当调节机构与工作头和/或与柄部和/或与可调节工作头元件脱离时,可以不将破坏力传递到调节元件,并且因此,保护这些调节元件。
26.除了此类措施之外,还可以为调节机构提供被动过载保护,以实现所涉及的机械零件的附加安全性。例如,过载离合器可以设置在调节装置的致动器与工作头和工作头元件之间的调节系之间,相应地,其中此类过载离合器可以打开机械连接并保护先前提及的
调节元件。一旦过载事件消失了,就可以重新建立连接,并且过载离合器可以再次闭合和/或接合。
27.除此之外或另选地,当调节装置能够响应于来自危险确定装置的危险信号而修改其它操作参数时,其可以帮助个人护理装置存活于危险场景。例如,可以减小驱动速度和/或往复运动频率和/或振幅,并且/或者当检测到正式危险时减小交易强度和/或切割速度。更具体地,调节装置可以被配置成响应于来自危险确定装置的危险信号而改变前述操作参数中的至少一个操作参数的机械功能。
28.根据检测到的危险类型和/或危险强度,调节装置可以提供前述措施或其组合中的仅一者。例如,当个人护理装置面对地板上的硬撞击时,调节装置可以减小工作头悬架的机械刚度。另一方面,当驱动单元和/或能量存储装置诸如电池由于极低或极热的环境条件造成伤害时,可以减小工作头的工作工具的驱动速度。另选地,当检测到驱动单元的热危险时,可以减小驱动速度,并且可以减少枢转/转动刚度(以减小皮肤收缩压力并因此减小驱动阻力)。
29.为了确定各种类型的危险,危险确定装置可以包括不同类型的各种传感器,其中,当危险确定装置包括至少一个传感器时,其基本上足够。
30.更具体地,危险确定装置可以包括坠落或自由下落确定模块,该坠落或自由下落确定模块用于确定个人护理装置的坠落或自由下落,并且在确定个人护理装置的坠落时发出危险信号。
31.响应于对自由下落场景的此类确定,调节装置可以提供工作头的最灵活的机械设置,诸如减小的枢转和/或转动刚度,和/或可以提供最大可用枢转范围和/或转动位移。当个人护理装置撞击地面或此类自由下落场景结束的任何其它表面时,当工作头可以枢转远离和/或转动远离以吸收由于撞击地面的机械能的至少一些时,其可以帮助个人护理装置存活于到地面上的此类撞击。
32.所述坠落确定模块可以包括至少一个传感器或检测器,该至少一个传感器或检测器用于检测指示坠落或自由下落的至少一个参数。例如,坠落确定模块可以包括加速度传感器,该加速度传感器用于检测个人护理装置的自由下落。此类加速度传感器可以安装在装置的重心之中或至少附近。在自由下落场景下,此类传感器经受在所有三个方向上为零或至少接近零的加速度。
33.不管此类传感器的安装位置如何,其可以是能够检测两个或三个轴上的加速度的多轴加速度传感器。另选地或除此类多轴传感器之外,可以提供多个传感器以用于检测不同轴上的加速度。例如,可以提供第一传感器,以检测沿着彼此垂直并且垂直于柄部的纵轴的两个轴或方向的加速度。可以提供第二传感器用于检测沿着所述柄部的纵轴的加速度。另一方面,为了具有减少的零件数量和简易的制造过程,可能有利的是,仅具有一个能够沿着彼此垂直的三个不同轴检测加速度的传感器。
34.至少一个加速度传感器的输出信号可以馈送到可包括在个人护理装置的电子控制器中的评估单元。此类评估或分析单元可以被配置成将加速度信号与针对不同加速轴的至少一个阈值或多个阈值进行比较。更具体地,评估单元可以被配置成识别加速度值,该加速度值小于用于限定的最小持续时间段的所有三个维度中的预定阈值。在此类情况下,即,当加速度信号和/或加速度值小于比所述时间阈值大的时间段内的所有三个维度中的阈值
时,假设或确定自由下落。
35.针对加速度值的限制可以设定为比重力加速度显著低的阈值。不管加速量的阈值如何,依据预定的最小持续时间段或时间间隔的时间阈值可以设定为比装置需要从典型工作高度下落到地面的时间显著少时间值。例如,时间阈值可以设定为装置需要从四分之一米或半米或一米的高度坠落到地面上的时间值。
36.除此之外或在此类加速度传感器的替代形式中,自由下落确定模块可以包括陀螺仪传感器和/或陀螺测试仪,该陀螺仪传感器和/或陀螺测试仪用于确定个人护理装置围绕一个或多个轴的旋转加速和/或旋转速度。此类陀螺仪传感器和/或陀螺测试仪可以位于个人护理装置的重力中心附近。例如,此类陀螺仪传感器和/或陀螺测试仪可以与上述加速度传感器组合以形成传感器单元,和/或可以容纳在加速度传感器的壳体内。
37.此类陀螺仪传感器的传感器信号可以馈送到评估单元,该评估单元可以是与用于加速度信号的相同的评估单元,其中此类评估单元可以将旋转角度和/或旋转加速和/或旋转速度与阈值进行比较,其中在超过此类阈值时可以触发危险信号。除此之外或另选地,可以超时分析陀螺仪信号,以确定例如陀螺仪信号的趋势。例如,当旋转加速显示急剧增加时,可以发出危险信号。
38.具体地,评估单元可以被配置成当观察到将个人护理装置的旋转速度与旋转角度和/或旋转加速结合的旋转超出限定值时,发出危险信号,从而证明自由下落的假设。
39.除此之外或另选地,评估单元可以被配置成假设装置的自由下落,并且因此,当加速度传感器的加速度信号和/或陀螺仪传感器的陀螺仪信号显示出突然变大的值和/或突然显著的增加时,发出用于调节装置的危险信号。此类突然变大的加速度和/或突然变大的陀螺仪信号通常在个人护理装置在其下降过程中撞击到地面的过程中的物体或表面时出现。
40.例如,针对此类突然变大的加速度的阈值可以设定为显著高于重力加速度。例如,当加速度值超过重力加速度的125%或150%或200%时,可以假设,由于个人护理装置在其到地面的过程中撞击到地面或物体上,因此,评估单元可以发出危险信号,以使工作头和/或调节装置进入安全机械设置和/或进入安全港功能中。
41.除此之外或在前述自由下落确定模块的替代形式中,危险确定装置可以包括温度传感器,该温度传感器用于确定个人护理装置的温度敏感元件上的温度负载。此类温度传感器的温度信号可以馈送到评估单元,以确定例如极低的环境温度和/或装置的元件的极低温度、和/或极高的环境温度和/或个人护理装置的一个或多个元件的极高温度。
42.例如,温度传感器可以被配置成用于确定电池或累积器的温度和/或驱动单元的温度。由于电池的极低温度例如可能对电池性能有害,因此,当电池过冷时应当保存能量,并且仅个人护理装置的基本功能可以保持活动。除此之外或另选地,由于驱动单元的极低温度可以意味着增加的驱动电阻,因此,可以防止具有高能量消耗的驱动模式。另一方面,超过某个阈值的高温还可以触发危险信号以切断至少一个功能,或降低功能的强度以保护个人护理装置。
43.更具体地,用于调节工作头的机械设置和/或机械功能的前述调节装置可以被激活或去激活或控制,以假设安全港配置和/或能量保存配置。例如,在检测到低于下阈限或高于上阈限的温度时,如果调节装置不管怎样尚未处于此类位置中,则该调节装置可以进
入预定位置。一旦给出此类配置,调节装置就可能不再使用,直到温度回到非危险温度窗口中。在检测到预定温度窗口之外的温度时,另一选项可以是去激活调节机构,而不管该调节机构的当前位置如何,以保存能量。
44.另一方面,当控制调节装置以提供预定义安全机械设置和/或机械功能时,可以使工作头和/或其可调节元件进入其中给予最大头部移动性和/或给予最小头部移动性以进行枢转和/或转动的配置。
45.除此之外或另选地,响应于温度负载确定模块而发出危险信号,危险确定装置还可以包括用于确定电池充电水平的电池充电模块,其中可以在确定充电水平低于某个阈值时发出危险信号。
46.电池充电水平可以以不同方式来确定。例如,电池充电确定模块可以包括用于确定电池电压的电压传感器和/或电压确定电路。除此之外或另选地,可以检测和分析充电器装置的相关参数,以确定电池的充电水平。例如,可以确定任何充电电流和放电电流,以计算电池的充电水平。
47.在检测到低电荷场景时,可以采取前述措施,例如可以使调节机构进入安全港配置中,并且然后可能去激活。除此之外或另选地,可以采取其它能量保存措施,诸如降低驱动频率和/或振幅或驱动速度。
48.根据附图中示出的示例,这些特征和其它特征变得更加明显。
49.从图1可以看出,个人护理装置20可以被配置为剃刀,诸如电动剃刀。不管个人护理功能,装置20可以包括细长柄部1,该细长柄部可以由容纳装置的另外部件的壳体形成。
50.工作头2可以围绕一个或多个枢转轴可枢转地支撑在柄部1的一端处。例如,工作头2可以围绕旋转轴13旋转,该旋转轴垂直于柄部1的纵轴延伸并且平行于工作头的主轴中的一个主轴。箭头3示出了此类可能的旋转运动。
51.工作头2可以包括用于实现期望的个人护理处理的一个或多个工作工具14。在剃刀的情况下,此类工作工具14可以包括切割工具,诸如阻止穿孔剪切箔下方的往复运动或旋转运动的切割器、和/或长发切割器和/或短发切割器和/或其组合。
52.可以由调节装置15来调节和/或可变地控制工作头2的机械设置和/或机械功能,其中此类调节装置15可以例如改变工作头2的旋转范围和/或旋转刚度。如图1所示,可以由调节装置15允许和阻止旋转,并且/或者可以由调节装置15改变工作头的旋转范围。
53.如图1所示,调节装置15可以包括可移动支撑的限制器6,该可移动支撑的限制器可以是楔形元件,其可移动地支撑在柄部1处和/或可以朝向和远离工作头2移动。此类限制器6可以与限制器对应物7协作,该限制器对应物可以在工作头处提供和/或可以包括依据例如楔形限制器6可进入其中的锥形凹部的轮廓。
54.调节装置15可以包括致动器4,该致动器用于移动和/或驱动限制器6进入较大限制位置和较小限制位置,其中致动器4可以被配置成将限制器6仅驱动到完全限制位置和最小限制位置。另选地,致动器4可以被配置成将限制器6驱动到一个或多个中间位置中,该中间位置提供工作头2的旋转范围的中间限制,其中此类中间位置可以逐步地或连续地变化。
55.致动器4可以包括驱动电机,诸如电动机,以用于将限制器6驱动到期望位置。
56.在个人护理装置20的正常操作期间,调节装置15可以响应于一个或多个操作参数,该一个或多个操作参数指示个人护理装置的使用和/或指示用户的行为。除了调节装置
15的此类正常使用之外,其还可以是个人护理装置20的危险预防系统的一部分,以使个人护理装置免受损坏和/或危险情况。
57.更具体地,个人护理装置20包括危险确定装置16,该危险确定装置用于自动确定针对个人护理装置的危险,其中调节装置15被配置成响应于来自危险确定装置16的危险信号而将工作头2调节到安全港配置中。
58.如图1所示,危险确定装置16可以包括自由下落确定模块17,以自动确定其中个人护理装置20无意坠落的自由下落情况。
59.此类自由下落确定模块17可以包括加速度传感器8,该加速度传感器可以安装在个人护理装置20的重心之中或附近。例如,加速度传感器8可以容纳在柄部1的内部。
60.在自由下落的情况下,加速度传感器8可以发出信号,该信号指示在所有三个方向上为0或至少接近0的加速度。
61.加速度传感器8的输出信号可以馈送到评估单元18,该评估单元可以包括电子控制器9或由该电子控制器实施,电子控制器可以包括微处理器和/或存储装置,以用于存储数据处理结果和/或软件,诸如装置的电子控制器内部或外部(例如智能手机软件应用程序内)的评估算法。
62.当评估单元18识别出预定最小持续时间段的所有三个维度中小于预定阈值的加速度值时,可以假设发生事件,并且危险确定装置16可以向被配置为响应于此类危险信号的调节装置15发出危险信号。
63.针对加速度值的阈值可以设定为比重力加速度显著低的值。时间间隔的长度可以设定为比装置需要从典型工作高度下落到地面的时间显著少的时间值。
64.此外,自由下落确定模块17可以包括陀螺仪传感器10,以依据旋转角度和/或旋转速度和/或旋转加速来确定旋转运动。此类陀螺仪传感器10可以向前述评估单元18馈送其陀螺仪信号。
65.陀螺仪传感器10可以容纳在柄部1中和/或可以与上述加速度传感器18组合。例如,陀螺仪传感器10可以容纳在与加速度传感器8相同的传感器壳体中。
66.评估单元18可以被配置成分析陀螺仪传感器10的陀螺仪信号,以用于指示自由下落场景的特征。例如,当观察到将个人护理装置20的旋转速度和旋转角度组合的旋转超过预定阈值时,可以假设自由下落场景,其中危险确定装置16可以在此类情况下发出危险信号。
67.用于确定自由下落事件的另一选项可以包括确定加速度的突然增加或突然变大,例如加速度传感器8的加速度信号和/或陀螺仪传感器10的陀螺仪信号的突然增加。当个人护理装置20坠落并在坠落到地面的过程中撞击到物体时,将会发生加速度传感器8和/或陀螺仪传感器10的传感器信号的突然增加。评估单元18可以分析针对此类特征的传感器信号。例如,可以将传感器信号与阈值进行比较,其中可以将此类阈值设定成显著高于重力加速度。还可与其它组合的又一选项是,危险确定装置16分析电子设置或电机设置。此类电子设置可以是,例如,是否打开或关闭剃刀,剃刀头可能具有哪种旋转倾斜,并且电机设置可以是电机是否正在运行。
68.当危险确定装置16发出危险信号时,例如在检测到自由下落场景时,控制调节装置15以提供安全港配置。更具体地,调节装置15可以将限制器6驱动到其最小限制位置,以
允许工作头2的最大运动。更具体地,由于限制器6可以进入其中工作头2与调节装置15之间没有给出机械联接的位置中,因此,不会将破坏力传递到调节装置的元件并因此保护这些元件。
69.除了此类措施以及所涉及的机械零件的附加安全性之外,还可以建立被动过载保护,其中此类过载保护可以包括,例如,在受试者受到过量负载和/或过量扭矩时自动打开的过载离合器。例如,当作用在调节装置15的致动器4上的力和/或扭矩达到或超过某个预定阈值水平时,此类过载离合器可以作出反应并且可以打开机械连接,以保护先前提及的调节元件。例如,此类过载离合器可以安装到楔形限制器6。更具体地,过载离合器可以在正常操作和正常负载期间将楔形限制器6保持在相对于驱动臂的预定位置中,而该过载离合器可以允许在过量负载和/或扭矩时使楔形限制器6挠曲和/或枢转。
70.此外,如从图1可以看出,危险确定装置16可以包括温度传感器11,以确定个人护理装置20的温度敏感元件上的温度负载。例如,温度传感器11可以放置在柄部1的内部和/或靠近作为温度敏感部件的电池12。
71.温度传感器11的温度信号可以馈送到评估单元18,该评估单元可以例如触发调节装置15的某个动作。更具体地,当电池12的温度太低和/或太高时,应当保存能量并且可以仅允许个人护理装置20的基本功能。更具体地,调节装置15可以依据能量保存配置进入安全港配置中。更具体地,可以将致动器4驱动到预定位置中,该预定位置可以是允许最大头部移动性的位置。在使调节装置15进入此类配置之后,该调节装置可以去激活和/或不再使用,直到温度回到预定温度窗口中。
72.此外,危险确定装置16可以包括充电水平检测器19,并且可以被配置成在检测到电池12的充电水平低于某个阈值时发出危险信号。当电池12几乎耗尽或低于前述阈值时,应当保持剩余能量用于装置的主要功能,并且应当避免由于调节装置15的调节动作而引起的附加消耗。更具体地,当电池水平低于预定阈值时,调节装置15可以去激活,或者另选地,可以进入预定义配置中,诸如限制器6允许工作头2的最大可移动性的位置中,并且其此后可以被去激活。
73.充电水平检测器19可以包括电压传感器,该电压传感器用于检测电池12的电池电压。除此之外或另选地,充电水平检测器19可以被配置成分析来自充电系统的信息。例如,电流检测器可以检测负载电流。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1