示教支持装置的制作方法
1.本发明涉及示教支持装置。
背景技术:
2.已知有使用设置于机械臂的力传感器进行力控制的机器人。公开了在这样的机器人进行作业之前,例如如专利文献1所示,对机器人进行作业信息的示教的示教支持装置。已知在专利文献1记载的示教支持装置中,在示教时,通过显示对作业对象物施加的力而进行示教的支持。在进行该示教的支持的装置中,按对各作业对象物示教的示教点,设定目标力等的示教信息。
3.专利文献1:日本特开平6-262563号公报
4.但是,在现有的方法中,由一眼把握对作业对象物设定的多个示教点中的示教信息是困难的。
技术实现要素:
5.本发明的示教支持装置具有在前端安装有研磨用工具的机械臂,并由力控制而控制,面向对于对象物进行研磨作业的机器人进行示教,所述示教支持装置具备:
6.示教点获取部,获取关于在所述对象物设定的多个示教点的信息;
7.研磨参数获取部,获取关于所述示教点获取部获取的所述多个示教点中的所述研磨作业的研磨参数的信息;以及
8.显示控制部,以基于所述研磨参数获取部获取的所述研磨参数的颜色,将所述多个示教点中的所述示教点与所述对象物重叠而显示。
附图说明
9.图1是示出具备本发明的示教支持装置的机器人系统的整体构成的图。
10.图2是图1所示的机器人系统的框图。
11.图3是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。
12.图4是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。
13.图5是示出由图1所示的机器人系统具备的显示部显示的设定画面的一例的图。
14.图6是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。
15.图7是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。
16.图8是用于对机器人系统以硬件为中心进行说明的框图。
17.图9是示出以机器人系统的硬件为中心的变形例1的框图。
18.图10是示出以机器人系统的硬件为中心的变形例2的框图。
19.附图标记说明
20.1:机器人;3:控制装置;3a:目标位置设定部;3b:驱动控制部;3c:存储部;4:示教装置;10:机械臂;10a:示教支持装置;11:基台;12:第一臂;13:第二臂;14:第三臂;15:第四
臂;16:第五臂;17:第六臂;18:中继线缆;19:力检测部;20:末端执行器;30:位置控制部;31:坐标转换部;32:坐标转换部;33:校正部;34:力控制部;35:指令合并部;40:显示部;400:设定画面;401:输入部;402:输入部;403:输入部;404:输入部;405:输入部;406:输入部;407:输入部;41:控制部;411:示教点获取部;412:研磨参数获取部;413:颜色信息获取部;414:显示控制部;42:存储部;43:通信部;61:控制器;62:计算机;63:计算机;64:云服务;65:网络;66:计算机;100:机器人系统;100a:机器人系统;100b:机器人系统;100c:机器人系统;171:关节;172:关节;173:关节;174:关节;175:关节;176:关节;351:执行部;cp:控制点;e1:编码器;e2:编码器;e3:编码器;e4:编码器;e5:编码器;e6:编码器;m1:电机;m2:电机;m3:电机;m4:电机;m5:电机;m6:电机;tcp:工具中心点;p:位置指令值;p’:位置指令值;p1:示教点;w1:工件;δs:力由来校正量。
具体实施方式
21.实施方式
22.图1是示出具备本发明的示教支持装置的机器人系统的整体构成的图。图2是图1所示的机器人系统的框图。图3是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。图4是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。图5是示出由图1所示的机器人系统具备的显示部显示的设定画面的一例的图。图6是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。图7是示出由图1所示的机器人系统具备的显示部显示的画面的一例的图。
23.以下,基于附图所示的适合的实施方式详细说明本发明的示教支持装置。此外,以下,为了方便说明,将图1中的+z轴方向即上侧也称为“上”,-z轴方向即下侧也称为“下”。另外,对于机械臂,将图1中的基台11侧也称为“基端”,将其相反侧即末端执行器侧也称为“前端”。另外,图1中的z轴方向即上下方向设为“铅垂方向”,x轴方向以及y轴方向即左右方向设为“水平方向”。
24.如图1所示,机器人系统100具备机器人1、控制机器人1的控制装置3、以及示教装置4。另外,示教装置4内置有示教支持装置10a。
25.首先,说明机器人1。
26.图1所示的机器人1是本实施方式中单臂的六轴垂直多关节机器人,具有基台11以及机械臂10。另外,能够在机械臂10的前端部安装末端执行器20。末端执行器20也可以是机器人1的构成要件,也可以不是机器人1的构成要件。
27.此外,机器人1不限于图示的构成,也可以是例如双臂型的多关节机器人。另外,机器人1也可以是水平多关节机器人。
28.基台11是从下侧可驱动地支承机械臂10的支承体,例如固定于工场内的地板。机器人1的基台11经由中继线缆18与控制装置3电连接。此外,机器人1与控制装置3的连接不限于图1所示的构成那样基于有线的连接,例如也可以基于无线的连接,而且,也可以经由互联网那样的网络连接。
29.在本实施方式中,机械臂10具有第一臂12、第二臂13、第三臂14、第四臂15、第五臂16和第六臂17,这些臂从基台11侧按该顺序连结。此外,机械臂10具有的臂的个数不限于六个,例如也可以是一个、两个、三个、四个、五个或者七个以上。另外,各臂的全长等的大小分
别没有特别限定,可适当设定。
30.基台11和第一臂12经由关节171连结。并且,相对于基台11,第一臂12以与铅垂方向平行的第一转动轴为转动中心,可绕该第一转动轴转动。第一转动轴与固定有基台11的地板的法线一致。
31.第一臂12和第二臂13经由关节172连结。并且,相对于第一臂12,第二臂13以与水平方向平行的第二转动轴为转动中心可转动。第二转动轴与正交于第一转动轴的轴平行。
32.第二臂13和第三臂14经由关节173连结。并且,相对于第二臂13,第三臂14以与水平方向平行的第三转动轴为转动中心可转动。第三转动轴与第二转动轴平行。
33.第三臂14和第四臂15经由关节174连结。并且,相对于第三臂14,第四臂15以与第三臂14的中心轴方向平行的第四转动轴为转动中心可转动。第四转动轴与第三转动轴正交。
34.第四臂15和第五臂16经由关节175连结。并且,相对于第四臂15,第五臂16以第五转动轴为转动中心可转动。第五转动轴与第四转动轴正交。
35.第五臂16和第六臂17经由关节176连结。并且,相对于第五臂16,第六臂17以第六转动轴为转动中心可转动。第六转动轴与第五转动轴正交。
36.另外,第六臂17成为机械臂10中位于最前端侧的机器人前端部。该第六臂17通过机械臂10的驱动,能够按各末端执行器20转动。
37.机器人1具备作为驱动部的电机m1、电机m2、电机m3、电机m4、电机m5以及电机m6、和编码器e1、编码器e2、编码器e3、编码器e4、编码器e5以及编码器e6。电机m1内置于关节171,使基台11和第一臂12相对地旋转。电机m2内置于关节172,使第一臂12和第二臂13相对地旋转。电机m3内置于关节173,使第二臂13和第三臂14相对地旋转。电机m4内置于关节174,使第三臂14和第四臂15相对地旋转。电机m5内置于关节175,使第四臂15和第五臂16相对地旋转。电机m6内置于关节176,使第五臂16和第六臂17相对地旋转。
38.另外,编码器e1内置于关节171,检测电机m1的位置。编码器e2内置于关节172,检测电机m2的位置。编码器e3内置于关节173,检测电机m3的位置。编码器e4内置于关节174,检测电机m4的位置。编码器e5内置于关节175,检测电机m5的位置。编码器e6内置于关节176,检测电机m6的位置。
39.编码器e1~编码器e6与控制装置3电连接,电机m1~电机m6的位置信息即旋转量作为电信号发送至控制装置3。并且,基于该信息,控制装置3使电机m1~电机m6经由未图示的电机驱动器驱动。即,控制机械臂10是指,控制电机m1~电机m6。
40.另外,在机械臂10的前端设定有控制点cp。控制点cp是成为进行机械臂10的控制时的基准的点。机器人系统100中,把握控制点cp在机器人坐标系中的位置,以控制点cp移动到所需的位置的方式驱动机械臂10。
41.另外,机器人1中,在机械臂10拆装自由地设置有检测力的力检测部19。并且,机械臂10能够在设置有力检测部19的状态下被驱动。力检测部19在本实施方式中是六轴力觉传感器。力检测部19检测相互正交的三个检测轴上的力的大小以及绕该三个检测轴的扭矩的大小。即,检测相互正交的x轴、y轴、z轴的各轴方向的力成分、成为绕x轴的tx方向的力成分、成为绕y轴的ty方向的力成分、以及成为绕z轴的tz方向的力成分。此外,在本实施方式中,z轴方向成为铅垂方向。另外,也可以将各轴方向的力成分称为“并进力成分”,将绕各轴
的力成分称为“旋转力成分”。另外,力检测部19不限于六轴力觉传感器,也可以是其他构成。
42.在本实施方式中,力检测部19设置于第六臂17。此外,作为力检测部19的设置部位,不限于第六臂17即位于最前端侧的臂,也可以是例如其他臂、相邻的臂彼此之间、基台11的下方,也可以分别设置于全关节。
43.在力检测部19中,能够将末端执行器20安装为可拆装。末端执行器20在本实施方式中由进行研磨的研磨用工具构成。末端执行器20在前端具有磨石,通过磨石旋转的同时与工件w1接触,研磨工件w1。此外,在本实施方式中,作为研磨用工具使用磨石,但不限于此,也可以是在纸、布、或者膜附着研磨颗粒而成的物质、或海绵。
44.另外,在机器人坐标系中,在末端执行器20的前端的任意的位置,优选在磨石的前端设定工具中心点tcp。如上述那样,在机器人系统100中,把握控制点cp在机器人坐标系中的位置,以控制点cp向所需的位置移动的方式驱动机械臂10。另外,通过预先把握末端执行器20的种类尤其是长度,能够把握工具中心点tcp和控制点cp的偏移量。因此,能够把握工具中心点tcp在机器人坐标系中的位置。因此,能够将工具中心点tc设为控制的基准。
45.工件w1是基于末端执行器20的研磨的对象物。工件w1的表面中被研磨的区域是研磨区域。作为工件w1,能够例举电子设备的连接器、塑料外装品、金属外装品等。
46.接着,说明控制装置3。
47.控制装置3与机器人1分离而配置,能够由内置有作为处理器的一例的cpu(central processing unit:中央处理器)的计算机等构成。该控制装置3也可以内置于机器人1的基台11。
48.控制装置3通过中继线缆18与机器人1可通信地连接。另外,控制装置3与示教装置4以线缆或者可无线通信地连接。示教装置4也可以是专用的计算机,也可以是安装有用于示教机器人1的程序的通用的计算机。也可以是例如将作为用于示教机器人1的专用装置的教导器等代替示教装置4而使用。而且,控制装置3和示教装置4也可以具备各自的壳体,也可以一体地构成。
49.另外,也可以在示教装置4中安装有程序,该程序用于在控制装置3生成将后述的目标位置姿势s
t
和目标力f
st
设为自变量的执行程序而加载到控制装置3。示教装置4具备显示器、处理器、ram、rom,这些硬件资源与示教程序协作而生成执行程序。
50.如图2所示,控制装置3是安装有用于进行机器人1的控制的控制程序的计算机。控制装置3具备处理器、未图示的ram、rom,这些硬件资源与程序协作从而控制机器人1。
51.另外,如图2所示,控制装置3具有目标位置设定部3a、驱动控制部3b、以及存储部3c。存储部3c例如由ram(random access memory:随机存取存储器)等挥发性存储器、rom(read only memory:只读存储器)等非挥发性存储器、拆装式的外部存储装置等构成。在存储部3c中存储有使机器人1工作的动作程序等。
52.目标位置设定部3a设定用于对工件w1执行预定的作业的目标位置姿势s
t
以及动作路径。目标位置设定部3a基于从示教装置4输入的示教信息等,设定目标位置姿势s
t
以及动作路径。
53.驱动控制部3b控制机械臂10的驱动,具有位置控制部30、坐标转换部31、坐标转换部32、校正部33、力控制部34、指令合并部35。
54.位置控制部30按照以预先作成的指令指定的目标位置,生成控制机器人1的工具中心点tcp的位置的位置指令信号即位置指令值。
55.在此,控制装置3能够以力控制等控制机器人1的动作。“力控制”是指,基于力检测部19的检测结果,变更末端执行器20的位置即工具中心点tcp的位置、第一臂12~第六臂17的姿势的机器人1的动作的控制。
56.力控制例如包括力触发控制、阻抗控制。在力触发控制中,由力检测部19进行力检测,由该力检测部19检测预定的力为止,使机械臂10进行移动、姿势的变更的动作。
57.阻抗控制包括模仿控制。在阻抗控制中,以将对机械臂10的前端部施加的力尽可能维持为预定的力即将由力检测部19检测的预定方向的力尽可能维持为目标力f
st
的方式控制机械臂10的动作。由此,例如对机械臂10进行阻抗控制时,机械臂10对于从对象物、操作员施加的外力,在所述预定方向上进行模仿动作。此外,目标力f
st
也包括0。例如作为模仿动作的情况的设定的一个,能够将目标值设为“0”。此外,还能够将目标力f
st
设为0以外的数值。作业者例如经由示教装置4可适当设定该目标力f
st
。另外,目标力f
st
还能够按各轴的方向(x、y、z),按各绕轴的方向(tx、ty、tz)设定。
58.存储部3c存储电机m1~电机m6的旋转角度的组合、以及机器人坐标系中的工具中心点tcp的位置的对应关系。另外,控制装置3基于机器人1进行的作业的各工序将目标位置姿势s
t
以及目标力f
st
中至少一方基于指令存储于存储部3c。将目标位置姿势s
t
以及目标力f
st
设为自变量即参数的指令按机器人1进行作业的各工序设定。
59.驱动控制部3b以设定的目标位置姿势s
t
与目标力f
st
在工具中心点tcp一致的方式控制第一臂12~第六臂17。目标力f
st
是指,应由第一臂12~第六臂17的动作达成的力检测部19的检测力以及扭矩。在此,“s”的文字表示规定机器人坐标系的轴的方向(x、y、z)中任意一个方向。另外,s还表示s方向的位置。在例如s=x的情况下,由机器人坐标系设定的目标位置的x方向成分成为s
t
=x
t
,目标力的x方向成分成为f
st
=f
xt
。
60.另外,在驱动控制部3b中,获取电机m1~电机m6的旋转角度时,基于对应关系,图2所示的坐标转换部31将该旋转角度转换为机器人坐标系中的工具中心点tcp的位置姿势s。并且,基于工具中心点tcp的位置姿势s、以及力检测部19的检测值,坐标转换部32将现实地作用于力检测部19的作用力fs在机器人坐标系中确定。
61.作用力fs的作用点被定义为与工具中心点tcp不同的力检测原点。力检测原点对应于力检测部19检测到力的点。此外,控制装置3按机器人坐标系中的工具中心点tcp的各位置姿势s,存储规定了力检测部19的传感器坐标系中的检测轴的方向的对应关系。因此,控制装置3基于机器人坐标系中的工具中心点tcp的位置姿势s以及对应关系,能够确定机器人坐标系中的作用力fs。另外,作用于机器人的扭矩能够根据作用力fs以及从接触点到力检测部19的距离算出,作为旋转力成分被确定。此外,在末端执行器20与工件w1接触而进行作业的情况下,接触点能够视为工具中心点tcp。
62.校正部33对作用力fs进行重力补偿。重力补偿是指,从作用力fs除去起因于重力的力或扭矩的成分。进行重力补偿的作用力fs能够视为作用于机械臂10或者末端执行器20的重力以外的力。
63.另外,校正部33对作用力fs进行惯性补偿。惯性补偿是指,从作用力fs除去起因于惯性力的力或扭矩的成分。进行惯性补偿的作用力fs能够视为作用于机械臂10或者末端执
行器20的惯性力以外的力。
64.力控制部34进行阻抗控制。阻抗控制是将假定的机械的阻抗通过电机m1~电机m6实现的能动阻抗控制。控制装置3在进行嵌合作业、螺合作业、研磨作业等末端执行器20从对象物受到力的接触状态的工序、直接示教时,执行这样的阻抗控制。此外,即使是这样的工序以外,例如通过在人与机器人1接触时进行阻抗控制,能够提高安全性。
65.在阻抗控制中,将目标力f
st
代入后述的运动方程式而导出电机m1~电机m6的旋转角度。控制装置3控制电机m1~电机m6的信号是pwm(pulse width modulation:脉冲宽度调制)调制的信号。
66.另外,在末端执行器20未受到外力的非接触状态的工序中,控制装置3从目标位置姿势s
t
以由线形运算导出的旋转角度控制电机m1~电机m6。将从目标位置姿势s
t
以由线形运算导出的旋转角度控制电机m1~电机m6的模式称为位置控制模式。
67.控制装置3通过将目标力f
st
以及作用力fs代入阻抗控制的运动方程式,确定力由来校正量δs。力由来校正量δs是指,在工具中心点tcp受到机械的阻抗的情况下,为了消除与目标力f
st
的力偏差δfs(t),工具中心点tcp应移动的位置姿势s的大小。下述式(1)是阻抗控制的运动方程式。
[0068][0069]
式(1)的左边通过对工具中心点tcp的位置姿势s的二阶微分值乘以假定质量系数m(以下,称为“质量系数m”)的第一项、对工具中心点tcp的位置姿势s的微分值乘以假定粘性系数d(以下,称为“粘性系数d”)的第二项、以及对工具中心点tcp的位置姿势s乘以假定弹性系数k(以下,称为“弹性系数k”)的第三项构成。式(1)的右边通过从目标力f
st
减去现实的力f而得的力偏差δfs(t)构成。式(1)中的微分是指,基于时间的微分。在机器人1进行的工序中,还存在作为目标力f
st
设定一定值的情况、作为目标力f
st
设定时间的函数的情况。
[0070]
质量系数m是指工具中心点tcp假定地具有的质量,粘性系数d是指工具中心点tcp假定受到的粘性电阻,弹性系数k是指工具中心点tcp假定受到的弹性力的弹簧常数。
[0071]
随着质量系数m的值变大,动作的加速度变小,随着质量系数m的值变小,动作的加速度变大。随着粘性系数d的值变大,动作的速度变慢,随着粘性系数d的值变小,动作的速度变快。随着弹性系数k的值变大,弹簧性变大,随着弹性系数k的值变小,弹簧性变小。
[0072]
这些质量系数m、粘性系数d以及弹性系数k也可以按各方向设定为不同的值,也可以与方向无关地设定为共通的值。另外,作业者能够在作业前适当设定质量系数m、粘性系数d以及弹性系数k。该输入例如使用示教装置4由作业者进行。
[0073]
这样的质量系数m、粘性系数d以及弹性系数k是力控制参数。力控制参数是机械臂10在实际进行作业之前设定的值。力控制参数中包括质量系数m、粘性系数d以及弹性系数k等。
[0074]
由此,在机器人系统100中,在执行力控制中,根据力检测部19的检测值、预先设定的力控制参数以及预先设定的目标力,求出校正量。该校正量是上述力由来校正量δs,从受到外力的该位置与应移动工具中心点tcp的位置的差。
[0075]
并且,指令合并部35对位置控制部30生成的位置指令值p加上力由来校正量δs。通过随时进行这些,指令合并部35根据为了移动到受到外力的位置而使用的位置指令值p,求出新的位置指令值p’。
[0076]
并且,坐标转换部31将该新的位置指令值p’转换为机器人坐标,通过执行部351执行,使工具中心点tcp移动到加上了力由来校正量δs的位置,对外力响应,对与机器人1接触的对象物,能够缓和再增加负荷。
[0077]
根据这样的驱动控制部3b,对于工件w1能够按压末端执行器20的同时进行力控制,施加所需的压力且良好地进行研磨作业。
[0078]
接着,说明示教装置4。
[0079]
如图2所示,示教装置4是受理各种设定、生成动作程序、或生成并显示图3~图7所示的图像的装置。示教装置4具有显示部40、控制部41、存储部42、通信部43。作为示教装置4,在图示的构成中是笔记本型个人电脑,但本发明没有特别限定于此,也可以是例如台式型个人电脑、平板电脑、智能手机等。
[0080]
如图5所示,显示部40显示作业者输入各种信息的设定画面400、显示示教的信息的仿真图像等。作为上述各种信息,能够例举关于示教点p1的信息、关于研磨作业的研磨参数的信息、关于上述力控制参数的信息等。
[0081]
控制部41具有至少一个处理器。作为处理器,可例举例如cpu(central processing unit)、gpu(graphics processing unit:图形处理器)等。控制部41读出并执行存储于存储部42的各种程序等。作为各种程序,能够例举例如机械臂10的动作程序、示教程序等。这些程序也可以是由示教装置4生成的,也可以是例如从cd-rom等的外部记录介质存储的,也可以是经由网络等存储的。
[0082]
由控制部41生成的示教程序经由通信部43发送到机器人1的控制装置3。由此,机械臂10能够以预定的条件执行预定的作业等。
[0083]
另外,控制部41具有示教点获取部411、研磨参数获取部412、颜色信息获取部413、显示控制部414。通过示教点获取部411、研磨参数获取部412、颜色信息获取部413以及显示控制部414,构成示教支持装置10a。
[0084]
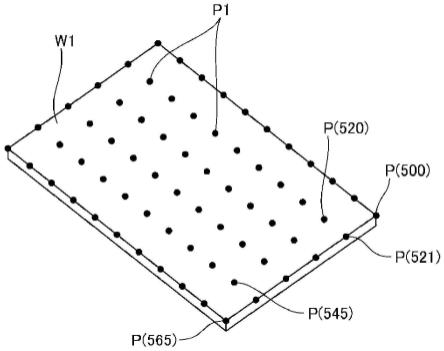
示教点获取部411获取作业者使用图5所示的设定画面400输入的关于示教点p1的信息。如图3所示,示教点p1是配置于工件w1的表面,应通过工具中心点tcp的点。在图示的构成中,示教点p1配置为格子状,对于各点关联关于通过顺序的信息。由此,能够设定图4所示那样的路径。此外,示教点p1相对于工件w1的位置信息例如由机器人坐标系表示。
[0085]
研磨参数获取部412获取作业者使用图5所示的设定画面400输入的关于研磨参数的信息。作为研磨参数,能够例举例如关于研磨用工具的信息、关于磨石的研磨颗粒的材质的信息、关于研磨颗粒的大小的信息、磨石的转动速度、按压力等。在图示的构成中,显示按压力。
[0086]
颜色信息获取部413获取作业者使用图5所示的设定画面400输入的颜色信息。
[0087]
显示控制部414以基于研磨参数获取部412获取的研磨参数的颜色,将多个示教点p1中的任意的示教点p1与工件w1重叠而显示。即,将多个示教点p1中的任意的示教点p1附上基于获取的研磨参数的颜色而显示。关于这一点,后面详述。
[0088]
存储部42保存控制部41可执行的各种程序、各种设定信息等。作为存储部42,例举例如ram(random access memory)等的挥发性存储器、rom(read only memory)等的非挥发性存储器、拆装式的外部存储装置等。
[0089]
通信部43使用例如有线lan(local area network:局域网)、无线lan等的外部接
口在与控制装置3之间进行信号的收发。
[0090]
显示部40由具有显示画面的各种显示器构成。在本实施方式中,通过操作鼠标、键盘等的输入操作部,作业者能够输入各种设定。其中,不限于该构成,也可以是例如触摸面板即显示部40具备显示功能和输入操作功能的构成。另外,也可以是并用触摸面板、鼠标、键盘的构成。
[0091]
此外,作为显示部40,不限于图示的构成,也可以是例如使图像在对象物、空中成像的构成。
[0092]
接着,对图5所示的设定画面400进行说明。设定画面400是在显示部40显示的画面,通过作业者输入各项目,能够进行示教。具体而言,设定画面400具有输入部401、输入部402、输入部403、输入部404、输入部405、输入部406、输入部407。
[0093]
输入部401是输入示教点p1的编号,将示教点p1的编号以多个范围设定的部分。另外,在各范围,使用以下的输入部402~输入部407,能够单独设定各项目。
[0094]
输入部402是按在输入部401指定的示教点p1的各范围,设定显示的颜色的部分。即,输入部402是在输入部401指定的示教点p1的范围的右侧选择颜色而输入的部分。
[0095]
输入部403是按在输入部401中指定的示教点p1的各范围,输入坐标系的种类的部分。坐标系的种类有本地坐标系、手指坐标系、机器人坐标系等。
[0096]
输入部404是按在输入部401指定的示教点p1的各范围,输入进行研磨作业时的磨石的按压力的方向、大小的部分。作为按压力的方向,有fx、fy、fz,能够通过从这些中选择一个而设定。另外,按压力的大小能够通过输入数值而设定。
[0097]
输入部405是按在输入部401指定的示教点p1的各范围,输入作为力控制参数之一的粘性系数的部分。此外,不限于该构成,也可以输入例如质量系数、弹性系数、这些中的两个以上的构成。
[0098]
输入部406是在输入部401指定的示教点p1的各范围,设定工具中心点tcp的移动速度的部分。移动速度能够通过输入数值而设定。
[0099]
输入部407是按在输入部401指定的示教点p1的各范围,设定研磨用工具的磨石的旋转速度的部分。磨石的旋转速度能够通过输入数值而设定。
[0100]
使用这样的设定画面400进行设定时,显示图6所示那样的仿真图像。在图6所示的仿真图像中,显示工件w1、以及在工件w1上设定的示教点p1。另外,示教点p1以基于研磨参数获取部412获取的研磨参数的颜色与工件w1重叠而显示。由此,作业者能够一眼把握自己输入的示教信息是怎样的内容。尤其是,通过对示教点p1赋予颜色显示,能够明确把握示教信息是怎样的内容。
[0101]
由此,示教支持装置10a具有在前端安装有作为研磨用工具的末端执行器20的机械臂10,并由力控制而控制,面向对于作为对象物的工件w1进行研磨作业的机器人1进行示教,其中,具备:示教点获取部411,获取关于在工件w1设定的多个示教点p1的信息;研磨参数获取部412,获取关于示教点获取部411获取的多个示教点p1中的研磨作业的研磨参数的信息;以及显示控制部414,以基于研磨参数获取部412获取的研磨参数的颜色,将多个示教点p1中的示教点p1与工件w1重叠而显示。由此,作业者能够一眼把握自己输入的示教信息是怎样的内容。尤其是,通过对示教点p1赋予颜色显示,能够明确把握示教信息是怎样的内容。
[0102]
另外,显示控制部414在获取的研磨参数是第一范围、例如按压力是4n以上且6n以下的情况下,以第一颜色显示示教点p1,在受理的研磨参数是与第一范围不同的第二范围、例如按压力是7n以上且10n以下的情况下,以与第一颜色不同的第二颜色显示任意的示教点p1。由此,作业者能够一眼更明确地把握自己输入的示教信息是怎样的内容。
[0103]
另外,显示控制部414显示包括示教点p1的圆。由此,作业者能够一眼更明确地把握自己输入的示教信息是怎样的内容。此外,不限于该构成,也可以是三角形、四边形或者再增加的多边形、星形等任意构成。
[0104]
另外,研磨参数包括研磨用工具具备的磨石的大小的信息,显示控制部414根据磨石的大小的信息,显示不同大小的圆。即,磨石的大小越大显示的圆越大,磨石的大小越小显示的圆越小。由此,能够一眼把握研磨用工具具备的磨石的大小。另外,能够把握实际研磨的区域。
[0105]
另外,具备获取设定颜色的信息的颜色信息获取部413。由此,能够设定显示的颜色。
[0106]
另外,也可以是颜色信息获取部413获取设定的颜色的数量、以及研磨参数的范围,显示控制部414基于颜色信息获取部413获取的颜色的数量以及研磨参数的范围,显示颜色的构成。即,也可以是根据输入的按压力的大小,以将按压力大的地方设为例如红色,将按压力小的地方设为例如绿色的方式自动分配显示颜色的构成。由此,也能够一眼把握按压力的大小的不同。而且,按压力的大小和显示颜色建立关联,因此能够确认按压力的分布。
[0107]
此外,如图7所示,也可以是按显示的各颜色显示箭头的构成。在这种情况下,优选根据按压力,将箭头的颜色、粗细、长度等区别地显示。由此,能够一眼把握按压力的大小的不同。
[0108]
由此显示控制部414显示包括示教点p1的箭头。由此,能够一眼把握按压力的大小的不同。
[0109]
机器人系统的其他构成例
[0110]
图8是用于对机器人系统以硬件为中心进行说明的框图。
[0111]
图8中示出连接有机器人1、控制器61和计算机62的机器人系统100a的整体构成。机器人1的控制也可以通过控制器61内的处理器读出存储器内的指令而执行,也可以通过存在于计算机62的处理器读出存储器内的指令经由控制器61而执行。
[0112]
因此,能够将控制器61和计算机62中任一方或者双方设定为“控制装置”。
[0113]
变形例1
[0114]
图9是示出以机器人系统的硬件为中心的变形例1的框图。
[0115]
图9中示出计算机63与机器人1直接连接的机器人系统100b的整体构成。机器人1的控制通过存在于计算机63的处理器读出存储器内的指令而直接执行。
[0116]
因此,能够将计算机63设定为“控制装置”。
[0117]
变形例2
[0118]
图10是示出以机器人系统的硬件为中心的变形例2的框图。
[0119]
图10中示出计算机66与内置有控制器61d机器人1连接,且计算机66经由lan等网络65与云服务64连接的机器人系统100c的整体构成。机器人1的控制也可以通过存在于计
算机66的处理器读出存储器内的指令而执行,通过存在于云服务64上的处理器经由计算机66读出存储器内的指令而执行。
[0120]
因此,能够将控制器61、计算机66和云服务64中任一个或者任意两个、或者三个设定为“控制装置”。
[0121]
以上,对于图示的实施方式说明本发明的示教支持装置,但本发明并非限定于此。另外,构成示教支持装置的各部可置换为可发挥同样的功能的任意的构成。另外,也可以附加任意的构成物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1