一种工业机器人关节平衡结构及其平衡方法与流程
1.本发明涉及工业机器人技术领域,尤其是涉及一种工业机器人关节平衡结构及其平衡方法。
背景技术:
2.工业机器人是当代众多种类机器人中的一种,其被广泛的应用与工厂的生产线上,通过工业机器人来代替人工,为工厂的高效生产效率带来的积极的效果。
3.现有的工业机器人其关节处通常利用大扭矩电机直接驱动,部分工业机器人通过液压系统进行关节转动,液压杆和驱动电机作为唯一的作用力承受部件。
4.上述中的现有技术方案存在以下缺陷:机器人关节处没有反向平衡力生成结构,不能有效的降低动力部件工作负荷。
技术实现要素:
5.本发明的目的是提供一种能根据外部物体重量自动生成反向平衡力,降低动力部件工作负荷的工业机器人关节平衡结构及其平衡方法。
6.为实现上述目的,本发明提供了如下技术方案:一种工业机器人关节平衡结构,包括第一连接座和第二连接座,所述第一连接座和第二连接座的相邻侧表面上均设置有一个环形槽,且第一连接座侧表面上的环形槽内固定连接有多个倾斜分布的第一安装板,所述第一安装板外表面上的安装孔内固定安装有电磁器,所述第二连接座侧表面上的环形槽内固定连接有多个第二安装板,所述第二安装板外表面上的安装孔内固定安装有多个永磁钢,多个所述永磁钢与多个电磁器位置以及数量一一对应,且位置对应的永磁钢和电磁器共中心轴。
7.通过采用上述技术方案,可以利用电磁器产生的磁力与永磁钢产生反向作用力,以此来产生反向平衡力,为机器人关节的稳定转动提供保障。
8.进一步地,所述第一连接座的一侧外表面上设置有安装槽,且安装槽的内壁上固定安装有电位器和伺服电机,所述伺服电机的旋转轴一端与电位器的拨动轴一端固定连接,所述电位器与电磁器电性连接。
9.通过采用上述技术方案,可以利用伺服电机来控制电位器转动,利用电位器来控制电磁器的电流大小,进而能实现自动调控电磁器磁力大小的操作。
10.进一步地,所述第一连接座的一侧外表面上设置有连接槽,所述第二连接座的一侧外表面上固定连接有连接环,所述连接环置于连接槽的内部,所述连接环的侧表面上设置有多个安装孔,且安装孔的内部活动安装有滚珠。
11.通过采用上述技术方案,可以利用连接环在连接槽内部的稳定转动来保证机器人关节转动的稳定。
12.进一步地,所述第一连接座的侧表面上设置有安装孔,且安装孔与连接槽内部相同,所述第一连接座侧表面上的安装孔内螺纹连接有润滑脂储料罐,所述润滑脂储料罐的
一端设置有支架,且支架的中间滑孔内贯穿有联动杆,所述联动杆的一端固定连接有第一活塞块,所述第一活塞块位于润滑脂储料罐的内部,所述联动杆的另一端固定连接有端块,所述联动杆的外部套接有弹簧,所述弹簧位于第一活塞块和支架之间。
13.通过采用上述技术方案,可以实时自动的为第一连接座和第二连接座的旋转连接处添加润滑脂,进一步提高机器人关节处转动的稳定性。
14.进一步地,所述第一连接座的中轴位置处的安装孔内卡扣固定有轴承,所述第二连接座的一侧外表面上固定连接有联动轴,且联动轴贯穿于轴承的中轴位置处,且联动轴的一端限位套接有扭矩检测器,所述电磁器包含有外壳体,所述外壳体一端面的安装孔内卡扣安装有铁芯,所述铁芯的外部缠绕有线圈。
15.通过采用上述技术方案,可以利用扭矩检测器来检测第二连接座转动需要的扭力,为反向平衡力的生成提供数据支持。
16.进一步地,所述扭矩检测器包含有检测座,所述检测座的一侧外表面上设置有安装槽,且安装槽的内部固定安装有四个转换器,所述检测座的一端设置有安装架,且安装架的安装孔内旋转安装有连接套管,所述连接套管的一端固定连接有拨动块,四个所述转换器两两分布在拨动块的对称两侧,所述转换器包括转换壳体,所述转换壳体的内部滑动安装有第二活塞块,所述转换壳体的内部安装腔内填充有液压油,所述第二活塞块的一侧外表面上固定连接有联动块,其中两个所述转换壳体侧表面上的安装孔内固定安装有第一压力传感器,另外两个所述转换壳体侧表面上的安装孔内固定安装有第二压力传感器,两个所述第一压力传感器和两个所述第二压力传感器依次交替分布。
17.通过采用上述技术方案,可以利用拨动块来对联动块产生挤压力,进而使得第二活塞块增大液压油的压力,然后利用第一压力传感器或第二压力传感器来对油压进行检测,从而检测扭力大小。
18.进一步地,所述第一连接座的一侧外表面上固定安装有驱动电机,所述驱动电机的旋转轴一端限位安插在连接套管的限位插孔内,所述第一连接座一侧外表面上的安装槽内固定安装有控制器,所述第一压力传感器和第二压力传感器均与控制器电性连接,所述控制器与伺服电机电性连接。
19.通过采用上述技术方案,可以利用第一压力传感器和第二压力传感器来为控制器提供数据支持,便于控制器控制伺服电机进行正转或反转。
20.进一步地,其平衡方法为:a1:首先,先将第一连接座和第二连接座安装在指定位置处,当该机器人抓取物体时,启动驱动电机,此时驱动电机的转动带动连接套管和拨动块转动,当拨动块发生转动时,联动块受到拨动块的挤压,此时第二活塞块在转换壳体的安装腔内滑动,液压油的压力增大,第一压力传感器产生压力数值;a2:压力数值传递至控制器的内部,此时控制器接收到压力数值,并对压力数值进行对比,当超出设定的范围值时,控制器中的控制模块控制伺服电机正转,在伺服电机的带动下,电位器的转轴发生转动,电位器的电阻值降低,此时线圈内部流通的电流值增大;a3:线圈内部的电流值增大使得铁芯一端的磁力增强,由于在铁芯的一端设置有永磁钢,因此第二连接座产生反向转动作用力,从而能有效的抵消第二连接座一端向下的作用力,使得机器人关节处具备高效的平衡作用力;
a4:当第二连接座一端的作用力消失时,在电磁器的作用下,第二连接座反转,进而使得拨动块与另外两个转换器产生挤压力,此时第二压力传感器产生数据,并传递至控制器的内部,经过控制器的识别判断后,控制伺服电机反转,进而增大电位器的电阻值,有效的降低反向平衡作用力,确保平衡作用力根据外部作用力的变化而变化,实现自动调节操作;a5:在机器人工作的过程中,连接环在连接槽的内部转动,可以有效的确保第二连接座稳定转动,同时将润滑脂填充在润滑脂储料罐的内部,在弹簧的作用下,第一活塞块对润滑脂储料罐内部的润滑脂进行挤压,此时润滑脂进入连接槽的内部,实时的为连接环进行润滑操作。
21.通过采用上述技术方案,可以有效的实现根据外部物体重量来自动调节反向平衡力的大小,通过反向平衡力的生成来降低驱动电机的工作负荷,提高机器人工作的稳定性。
22.综上所述,本发明的有益技术效果为:1、通过在控制电磁器的工作电流来调整电磁器一端的磁力,进而调整该机器人关节处的平衡作用力,根据外部拿取物体的重量来自动调节平衡作用力,有效的降低电机工作负荷,提高机器人的工作性能;2、通过润滑脂储料罐的设置,可以在润滑脂储料罐的内部填充润滑脂,利用弹簧对第一活塞块产生作用力,利用第一活塞块对润滑脂储料罐内部的润滑脂施加挤压力,确保连接槽的内部含有大量的润滑脂,保证了机器人关节转动的稳定性。
附图说明
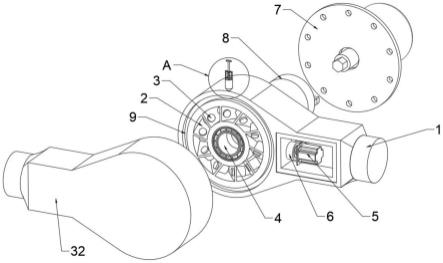
23.图1为本发明的立体结构示意图;图2为本发明的立体后视图;图3为本发明图1中a处放大图;图4为本发明图2中b处放大图;图5为本发明的电磁器内部结构图;图6为本发明的转换器内部结构图。
24.图中,1、第一连接座;2、第一安装板;3、电磁器;4、轴承;5、伺服电机;6、电位器;7、驱动电机;8、扭矩检测器;9、连接槽;10、连接环;11、第二安装板;12、永磁钢;13、控制器;14、润滑脂储料罐;15、联动杆;16、弹簧;17、第一活塞块;18、端块;19、检测座;20、连接套管;21、拨动块;22、转换器;23、第一压力传感器;24、第二压力传感器;25、外壳体;26、铁芯;27、线圈;28、转换壳体;29、第二活塞块;30、联动块;31、液压油;32、第二连接座。
具体实施方式
25.以下对本发明作进一步详细说明。
26.参照图1、图2,一种工业机器人关节平衡结构,包括第一连接座1和第二连接座32,第一连接座1和第二连接座32的相邻侧表面上均设置有一个环形槽,且第一连接座1侧表面上的环形槽内固定连接有多个倾斜分布的第一安装板2,第一安装板2外表面上的安装孔内固定安装有电磁器3,第二连接座32侧表面上的环形槽内固定连接有多个第二安装板11,第二安装板11外表面上的安装孔内固定安装有多个永磁钢12,多个永磁钢12与多个电磁器3
位置以及数量一一对应,且位置对应的永磁钢12和电磁器3共中心轴,第一连接座1的一侧外表面上设置有安装槽,且安装槽的内壁上固定安装有电位器6和伺服电机5,伺服电机5的旋转轴一端与电位器6的拨动轴一端固定连接,电位器6与电磁器3电性连接,第一连接座1的中轴位置处的安装孔内卡扣固定有轴承4,第二连接座32的一侧外表面上固定连接有联动轴,且联动轴贯穿于轴承4的中轴位置处,且联动轴的一端限位套接有扭矩检测器8,第一连接座1一侧外表面上的安装槽内固定安装有控制器13,控制器13与伺服电机5电性连接,其中在第二连接座32受到外部作用力时,扭矩检测器8检测到数值,将该数值传递至控制器13内,经过控制器13的识别后,控制伺服电机5进行正转,以此来控制电位器6的电阻值大小,进而控制电磁器3一端的磁力大小,在永磁钢12的作用下,使得第二连接座32的旋转处产生反向平衡作用力,以此来抵消第二连接座32一端受到的外部作用力,降低电机工作负荷,机器人关节处转动的稳定性。
27.参照图1、图2、图3,第一连接座1的一侧外表面上设置有连接槽9,第二连接座32的一侧外表面上固定连接有连接环10,连接环10置于连接槽9的内部,连接环10的侧表面上设置有多个安装孔,且安装孔的内部活动安装有滚珠,第一连接座1的侧表面上设置有安装孔,且安装孔与连接槽9内部相同,第一连接座1侧表面上的安装孔内螺纹连接有润滑脂储料罐14,润滑脂储料罐14的一端设置有支架,且支架的中间滑孔内贯穿有联动杆15,联动杆15的一端固定连接有第一活塞块17,第一活塞块17位于润滑脂储料罐14的内部,联动杆15的另一端固定连接有端块18,联动杆15的外部套接有弹簧16,弹簧16位于第一活塞块17和支架之间,此举可以在润滑脂储料罐14的内部填充润滑脂,利用弹簧16对第一活塞块17产生作用力,利用第一活塞块17对润滑脂储料罐14内部的润滑脂施加挤压力,确保连接槽9的内部含有大量的润滑脂,保证了机器人关节转动的稳定性。
28.参照图5,电磁器3包含有外壳体25,外壳体25一端面的安装孔内卡扣安装有铁芯26,铁芯26的外部缠绕有线圈27,此举可以通过调节线圈27内流过的电流大小来调节铁芯26一端的磁力,便于该机器人关节自动调节平衡作用力。
29.参照图4和图6,扭矩检测器8包含有检测座19,检测座19的一侧外表面上设置有安装槽,且安装槽的内部固定安装有四个转换器22,检测座19的一端设置有安装架,且安装架的安装孔内旋转安装有连接套管20,连接套管20的一端固定连接有拨动块21,四个转换器22两两分布在拨动块21的对称两侧,转换器22包括转换壳体28,转换壳体28的内部滑动安装有第二活塞块29,转换壳体28的内部安装腔内填充有液压油31,第二活塞块29的一侧外表面上固定连接有联动块30,其中两个转换壳体28侧表面上的安装孔内固定安装有第一压力传感器23,另外两个转换壳体28侧表面上的安装孔内固定安装有第二压力传感器24,两个第一压力传感器23和两个第二压力传感器24依次交替分布,第一连接座1的一侧外表面上固定安装有驱动电机7,驱动电机7的旋转轴一端限位安插在连接套管20的限位插孔内,第一压力传感器23和第二压力传感器24均与控制器13电性连接,此举可以第一压力传感器23和第二压力传感器24来检测转换器22转换的作用力,并将检测的数值传递至控制器13内,为控制器13的控制提供数据支持,为自动调节反向平衡作用力提高保障。
30.工作原理:首先,先将第一连接座1和第二连接座32安装在指定位置处,当该机器人抓取物体时,启动驱动电机7,此时驱动电机7的转动带动连接套管20和拨动块21转动,当拨动块21发生转动时,联动块30受到拨动块21的挤压,此时第二活塞块29在转换壳体28的
安装腔内滑动,液压油31的压力增大,第一压力传感器23产生压力数值,压力数值传递至控制器13的内部,此时控制器13接收到压力数值,并对压力数值进行对比,当超出设定的范围值时,控制器13中的控制模块控制伺服电机5正转,在伺服电机5的带动下,电位器6的转轴发生转动,电位器6的电阻值降低,此时线圈27内部流通的电流值增大,线圈27内部的电流值增大使得铁芯26一端的磁力增强,由于在铁芯26的一端设置有永磁钢12,因此第二连接座32产生反向转动作用力,从而能有效的抵消第二连接座32一端向下的作用力,使得机器人关节处具备高效的平衡作用力,当第二连接座32一端的作用力消失时,在电磁器3的作用下,第二连接座32反转,进而使得拨动块21与另外两个转换器22产生挤压力,此时第二压力传感器24产生数据,并传递至控制器13的内部,经过控制器13的识别判断后,控制伺服电机5反转,进而增大电位器6的电阻值,有效的降低反向平衡作用力,确保平衡作用力根据外部作用力的变化而变化,实现自动调节操作,在机器人工作的过程中,连接环10在连接槽9的内部转动,可以有效的确保第二连接座32稳定转动,同时将润滑脂填充在润滑脂储料罐14的内部,在弹簧16的作用下,第一活塞块17对润滑脂储料罐14内部的润滑脂进行挤压,此时润滑脂进入连接槽9的内部,实时的为连接环10进行润滑操作。
31.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1