膨胀螺栓安装机器人及其施工方法与流程
1.本发明涉及建筑施工技术领域,具体涉及一种膨胀螺栓安装机器人及其施工方法。
背景技术:
2.在幕墙工程、机电安装工程施工过程中,需要大量的后置埋件,埋件则需要通过膨胀螺栓进行固定。在装饰工程的吊顶施工过程中,需要大量的膨胀螺栓连接丝杆。目前膨胀螺栓的施工工艺为打孔、吹灰尘、安装胀栓、安装丝杆或埋件。安装膨胀螺栓需要多个设备,设备携带不方便,电源需要来回切换。正常的吊顶施工的膨胀螺栓在1.8米以上部位施工,还需要搭设脚手架或梯子,存在极大的安全隐患。
3.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
4.为克服现有技术所存在的缺陷,现提供一种膨胀螺栓安装机器人及其施工方法,以解决现有的建筑吊顶的施工时需要安装大量的膨胀螺栓,存在施工效率低的问题。
5.为实现上述目的,提供一种膨胀螺栓安装机器人,包括:
6.移动式底座;
7.竖向设置的电动伸缩杆,可转动地安装于所述移动式底座,所述移动式底座安装有用于转动所述电动伸缩杆的驱动装置,所述电动伸缩杆的上部固设有支承件;
8.功能设备,包括用于在天花板上开设安装孔的钻孔装置、用于吹扫所述安装孔内的钻孔残留物的清孔装置、用于将膨胀螺栓压入所述安装孔内的压料装置和用于将紧固螺母螺合于所述膨胀螺栓的螺合装置,所述钻孔装置、所述清孔装置、所述压料装置和所述螺合装置分别可升降地安装于所述支承件,所述钻孔装置、所述清孔装置、所述压料装置和所述螺合装置沿所述电动伸缩杆的圆周方向间隔设置;以及
9.控制器,连接于所述电动伸缩杆、所述驱动装置、所述钻孔装置、所述清孔装置、所述压料装置和所述螺合装置。
10.进一步的,所述钻孔装置、所述清孔装置、所述压料装置和所述螺合装置依次沿所述电动伸缩杆的圆周方向等间距设置。
11.进一步的,所述支承件安装有距离传感器,所述距离传感器连接于所述控制器。
12.进一步的,所述距离传感器为红外线测距离传感器。
13.进一步的,所述钻孔装置为电锤。
14.进一步的,所述电锤安装有集尘罩,所述集尘罩与所述电锤的钻头同轴设置,所述集尘罩的罩口朝向所述钻头的远离所述电锤的一端。
15.进一步的,所述清孔装置包括:
16.竖向设置的喷气管,所述喷气管的外径小于所述安装孔的内径;以及
17.吹风机,安装于所述移动式底座,所述吹风机的出风口通过第一软管连接于所述喷气管。
18.进一步的,所述集尘罩开设有抽吸贯孔,所述移动式底座安装有吸尘器,所述吸尘器的吸口通过第二软管连接于所述抽吸贯孔。
19.进一步的,所述移动式底座包括:
20.容置箱,所述容置箱的顶部开设有支撑孔,所述电动伸缩杆的下端可转动地安装于所述支撑孔中,所述驱动电机、所述吸尘器和所述吹风机分别安装于所述容置箱内,所述驱动电机传动连接于所述电动伸缩杆的下端;以及
21.多个滚轮,安装于所述容置箱的底部。
22.本发明提供一种膨胀螺栓安装机器人的施工方法,包括以下步骤:
23.将膨胀螺栓竖向安装于压料装置、并将所述膨胀螺栓的紧固螺母安装于螺合装置;
24.将移动式底座移动至天花板的下方,同时控制器调节电动伸缩杆的高度,使得钻孔装置对准于天花板的所述膨胀螺栓的安装工位;
25.所述钻孔装置抬升并于所述天花板的所述安装工位钻进开设安装孔;
26.在所述安装孔开设后,所述钻孔装置下降并退出所述安装孔,所述控制器通过驱动装置转动所述电动伸缩杆,使得清孔装置对准于所述安装孔;
27.所述清孔装置抬升并吹扫所述安装孔内的钻孔残留物;
28.在所述安装孔内的钻孔残留物清除后,所述清孔装置下降并退出所述安装孔,所述控制器通过所述驱动装置转动所述电动伸缩杆,使得所述膨胀螺栓对准于所述安装孔;
29.所述压料装置抬升以将所述膨胀螺栓压入所述安装孔中并下降与所述膨胀螺栓分离;
30.在所述压料装置与所述膨胀螺栓分离后,所述控制器通过所述驱动装置转动所述电动伸缩杆,使得所述紧固螺母对准于所述膨胀螺栓;
31.所述螺合装置抬升并将所述紧固螺母螺合于所述膨胀螺栓以将所述膨胀螺栓锁附于所述天花板。
32.本发明的有益效果在于,本发明的膨胀螺栓安装机器人通过钻孔装置、清孔装置、压料装置和螺合装置实现膨胀螺栓安装过程中的多功能旋转转换,一体化流水作业,既提高了吊顶装饰工程的膨胀螺栓的安装效率,又能节省人力成本,同时还提高了工程施工安全性。
附图说明
33.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
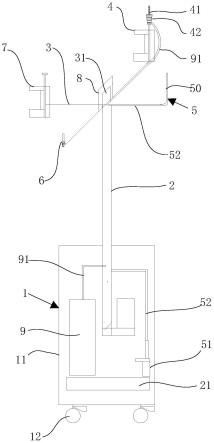
34.图1为本发明实施例的膨胀螺栓安装机器人的结构示意图。
具体实施方式
35.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了
便于描述,附图中仅示出了与发明相关的部分。
36.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
37.参照图1所示,本发明提供了一种膨胀螺栓安装机器人,包括:移动式底座1、电动伸缩杆2、功能设备和控制器。
38.在本实施例中,移动式底座可以是机械移动底座,较佳的为电动移动式底座。其中,电动移动式底座连接于控制器。
39.电动伸缩杆2竖向设置。电动伸缩杆2可转动地安装于移动式底座1。移动式底座1安装有驱动装置21。电动伸缩杆2的上部固设有支承件3。驱动装置21用于转动电动伸缩杆2,使得支承件绕电动伸缩杆的中轴线转动。
40.功能设备包括钻孔装置4、清孔装置、压料装置6和螺合装置7。
41.具体的,钻孔装置4用于在天花板上开设安装孔。安装孔用于安装膨胀螺栓。
42.清孔装置用于将安装孔内的钻孔残留物吹扫干净,使得膨胀螺栓能紧密地嵌合于安装孔中。
43.压料装置6用于将膨胀螺栓压入安装孔内。
44.螺合装置7用于将紧固螺母螺合于膨胀螺栓,使得膨胀螺栓牢固地锁附于天花板。
45.在本实施例中,钻孔装置4、清孔装置、压料装置6和螺合装置7分别可升降地安装于支承件3。钻孔装置4、清孔装置5、压料装置6和螺合装置7沿电动伸缩杆2的圆周方向间隔设置。
46.控制器连接于电动伸缩杆2、驱动装置21、钻孔装置4、清孔装置、压料装置6和螺合装置7。
47.本发明的膨胀螺栓安装机器人通过钻孔装置、清孔装置、压料装置和螺合装置实现膨胀螺栓安装过程中的多功能旋转转换,一体化流水作业,既提高了吊顶装饰工程的膨胀螺栓的安装效率,又能节省人力成本,同时还提高了工程施工安全性。
48.在本实施例中,移动式底座1包括:容置箱11和多个滚轮12。
49.容置箱11的顶部开设有支撑孔。电动伸缩杆2的下端可转动地安装于支撑孔中。容置箱11内分别驱动电机、吹风机51和吸尘器9分别安装于。驱动电机传动连接于电动伸缩杆2的下端。多个滚轮12安装于容置箱11的底部。
50.在本实施例中,容置箱呈长方体形或正方体形。容置箱包括底板、顶板和侧板。顶板设置于底板的上方,侧板连接于底板和顶板。侧板沿底板的周向方向设置一圈。底板、侧板以及顶板之间围合形成一空腔。顶板上开设有所述支撑孔。
51.在本实施例中,驱动电机通过齿轮结构传动连接于电动伸缩杆的下端。较佳的,齿轮结构包括主动齿轮和从动齿轮。主动齿轮同轴安装于驱动电机的输出端。从动齿轮同轴连接于电动伸缩杆的下端。主动齿轮啮合于从动齿轮。
52.作为一种较佳的实施方式,滚轮为电动滚轮,电动滚轮信号连接于控制器。
53.作为一种较佳的实施方式,钻孔装置4、清孔装置、压料装置6和螺合装置7依次沿电动伸缩杆2的圆周方向等间距设置。在本实施例中,钻孔装置4、清孔装置、压料装置6和螺合装置7呈矩阵式布设,在天花顶开设安装孔时,驱动电机驱动电动伸缩杆转动90
°
,则下一道膨胀螺栓的安装工序所对应的装置则对准于天花板。
54.在本实施例中,电动伸缩杆可以是电动液压推杆。
55.作为一种较佳的实施方式,钻孔装置4、清孔装置、压料装置6和螺合装置7分别电动液压推杆可升降地安装于支承件上。在本实施例中,支承件为十字架,电动伸缩杆的上端连接于十字架的十字交叉处。钻孔装置4、清孔装置、压料装置6和螺合装置7分别通过电动液压推杆安装于十字架的外缘。电动液压推杆竖向设置。钻孔装置4、清孔装置、压料装置6和螺合装置7的电动液压推杆分别信号连接于控制器。控制器通过电动液压推杆抬升或下降功能设备。
56.在本实施例中,支承件3安装有距离传感器31。距离传感器连接于控制器。
57.较佳的,距离传感器为红外线测距离传感器。通过距离传感器可以精确定位功能设备的高度,同时也能避免功能设备碰撞天花板。
58.在本实施例中,钻孔装置4为电锤。电锤安装有集尘罩42,集尘罩与电锤的钻头41同轴设置,集尘罩的罩口朝向钻头的远离电锤的一端。
59.清孔装置5包括:喷气管50和吹风机51。其中,喷气管竖向设置。喷气管通过电动液压推杆竖设于十字架的外缘。喷气管50的外径小于安装孔的内径。吹风机51安装于移动式底座1的空腔内。吹风机51的出风口通过第一软管52连接于喷气管50。
60.在本实施例中,集尘罩开设有抽吸贯孔。吸尘器9的吸口通过第二软管91连接于抽吸贯孔。
61.在本实施例中,压料装置为电动手钳。在安装在膨胀螺栓时,将膨胀螺栓夹持于电动手钳中,在通过电动伸缩杆调节支承件的高度,上帝功能设备到底天花板的下方,再通过电动液压推杆精确调节功能设备与天花板之间的距离,使得精确开孔、清孔、压入膨胀螺栓。
62.作为一种较佳的实施方式,螺合装置为电动扭矩扳手。紧固螺母可以在预先螺合于膨胀螺栓上。电动手钳可以预先夹持一基座。基座的上部开设有卡合凹槽。将紧固螺母螺合于膨胀螺栓的尾部并嵌设于卡合凹槽中,卡合凹槽的形状与螺合有紧固螺母的膨胀螺栓的尾部的形状相适配,膨胀螺栓的头部则伸至套筒的外部。控制器通过电动液压推杆抬升电动手钳,使得膨胀螺栓的头部牢固地插设于安装孔中。在控制器下降电动手钳,并转动90
°
后,使得电动扭矩扳手的套筒对准于膨胀螺栓的尾部,在控制器通过电动液压推杆抬升电动扭矩扳手后,电动扭矩扳手的套筒嵌套于膨胀螺栓尾部的紧固螺母,电动扭矩扳手旋转紧固螺母,使得膨胀螺栓牢牢地被锁附于天花板上。
63.本发明提供一种膨胀螺栓安装机器人的施工方法,包括以下步骤:
64.s1:将膨胀螺栓竖向安装于压料装置6、并将膨胀螺栓的紧固螺母安装于螺合装置7。
65.s2:将移动式底座1移动至天花板的下方,同时控制器调节电动伸缩杆2的高度,使得钻孔装置4对准于天花板的膨胀螺栓的安装工位。
66.s3:钻孔装置4抬升并于天花板的安装工位钻进开设安装孔。
67.s4:在安装孔开设后,钻孔装置4下降并退出安装孔,控制器通过驱动装置21转动电动伸缩杆2,使得清孔装置对准于安装孔。
68.s5:清孔装置抬升并喷气管吹扫安装孔内的钻孔残留物。
69.s6:在安装孔内的钻孔残留物清除后,清孔装置下降并退出安装孔,控制器通过驱
动装置21转动电动伸缩杆2,使得膨胀螺栓对准于安装孔;
70.s7:压料装置6抬升以将膨胀螺栓压入安装孔中并下降与膨胀螺栓分离。
71.s8:在压料装置6与膨胀螺栓分离后,控制器通过驱动装置21转动电动伸缩杆2,使得紧固螺母对准于膨胀螺栓。
72.s9:螺合装置7抬升并将紧固螺母螺合于膨胀螺栓以将膨胀螺栓锁附于天花板。
73.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1