一种仓储码垛机器人取料装置
1.本发明属于仓储物流技术领域,更具体地,涉及一种仓储码垛机器人取料装置。
背景技术:
2.码垛机器人广泛应用于仓储物流行业,用于对物料进行搬运码垛,其通过机械与计算机程序结合,为现代物流行业提供了更高的生产效率,码垛机器人大大节省了劳动力。
3.现有的仓储码垛机器人在取料时,多是通过吸盘或夹持爪对传送带上的物料进行吸附或夹取,然而,在仓储运输中,物料的形状和重量各不相同,有些物料包装的表面不平整或物料重量较大时,导致吸盘无法吸附或物料从吸盘脱落,而不规则形状的物料只能通过夹取方式进行取料,然而,由于物料形状并不规则,夹持爪夹持的部位无法确定,因此容易造成脱落,或夹持位置不当,造成物料损坏。
技术实现要素:
4.本发明的目的是提供一种可根据物料信息选择不同取料方式的仓储码垛机器人取料装置。
5.为了实现上述目的,本发明提供一种仓储码垛机器人取料装置,包括取料机构、控制机构和识别装置;
6.所述取料机构与所述机器人的传送臂连接,所述传送臂控制所述取料机构移动,所述取料机构包括第一夹持结构和第二夹持结构,所述第一夹持结构和第二夹持结构均包括夹持件、吸盘和夹持带,所述吸盘设置于夹持件底部,所述夹持带设置于夹持件侧面;
7.所述控制机构包括驱动装置、气泵和控制器,所述驱动装置与所述夹持件连接,控制所述夹持件进行夹取或松放物料,所述气泵与所述第一夹持结构和第二夹持结构的吸盘连接,所述控制器分别与所述驱动装置、传送臂和气泵连接,分别控制驱动装置和气泵的启停,并控制所述传送臂的运动;
8.所述识别装置包括摄像头和处理器,所述处理器分别与所述摄像头和所述控制器连接,所述摄像头获取物料信息,并将物料信息传送至所述处理器,所述处理器对所述物料信息进行识别判断,根据所述物料信息向所述控制器发送信号,使所述控制器控制所述驱动装置或所述气泵运转。
9.优选地,所述物料信息包括物料形状信息,所述摄像头获取物料的图像信息,并将所述图像信息传送至所述处理器,所述处理器对所述图像信息进行识别,以确定物料的形状。
10.优选地,所述处理器根据所述物料形状信息判断物料的形状;
11.若物料为扁平状,所述处理器向所述控制器发送控制信号,所述控制器控制所述气泵开启,通过吸盘对物料进行吸附取料,之后所述控制器控制所述传送臂对物料进行移动;
12.若物料为方形箱状,所述处理器向所述控制器发送控制信号,所述控制器控制所
述驱动装置启动,带动所述夹持件对物料进行夹持,之后所述控制器控制所述传送臂对物料进行移动;
13.若物料为不规则形状,所述处理器向所述控制器发送控制信号,所述控制器控制所述驱动装置启动,带动所述夹持带对物料进行夹持,之后所述控制器控制所述传送臂对物料进行移动。
14.优选地,所述物料信息包括物料重量信息,所述物料重量信息通过条形码或二维码设置于物料的标签上,所述摄像头设置于输送所述物料的传送带顶部,摄像头将所述物料上的条形码或二维码信息反馈至所述处理器,所述处理器识别所述摄像头反馈的条形码或二维码信息,以确定所述条形码或二维码所对应的物料重量。
15.优选地,所述物料为扁平状时,所述处理器根据所述物料形物料重量信息,判断物料的重量是否高于所述处理器的预设值;
16.若物料重量低于预设值,所述处理器向所述控制器发送控制信号,所述控制器控制所述气泵开启,控制所述第一夹持结构或所述第二夹持结构的吸盘工作,对扁平物料进行吸附取料;
17.若物料重量高于预设值,所述处理器向所述控制器发送控制信号,所述控制器控制所述气泵开启,控制所述第一夹持结构和所述第二夹持结构的吸盘同时工作,同时对扁平物料进行吸附取料。
18.优选地,所述夹持件内部设置有空腔,所述吸盘位于所述空腔内,且所述吸盘的下表面略突出于所述夹持件的下表面。
19.优选地,所述第一夹持结构与所述传送臂固定连接,所述第二夹持结构与所述传送臂活动连接,所述的驱动装置与所述第二夹持结构连接,控制所述第二夹持结构相对于所述第一夹持结构进行移动。
20.优选地,所述第一夹持结构和第二夹持结构均包括连接架,所述第一夹持结构和第二夹持结构均通过连接架与所述传送臂连接,所述夹持件安装于所述连接架底部,所述的夹持带一端与所述夹持件连接,另一端与所述连接架底部连接。
21.优选地,所述传送臂通过连接座分别与所述第一夹持结构和所述第二夹持结构连接,所述连接架包括第一连接架和第二连接架,所述第一夹持结构通过第一连接架与所述连接座固定连接,所述第二夹持结构通过第二连接架与所述连接座滑动连接,所述驱动装置为驱动气缸,所述驱动气缸的安装端与所述连接座连接,所述驱动气缸的伸缩端与所述第二连接架连接。
22.优选地,所述夹持件侧面设置有与物料相配合的防滑条,所述夹持带为多个,且所述夹持带外部设置有防滑层。
23.本发明与现有技术相比的有益效果为:本发明通过识别装置获取物料信息,根据物料信息选择不同的取料方式,若物料为扁平状时,采用吸盘进行吸附;若为规则的方形物料时,则采用夹持件进行夹取;若物料为不规则形状,则通过夹持带将物料绑紧,通过过采用上述多种取料方式,可有针对性的对物料进行取料,即可加强取料取料时的稳定效果,又可减少设备运转时的能源损耗;
24.同时,通过在两个夹持结构之间增加夹持带,当物料为不规则形状时,选择夹持带对物料进行进行绑紧固定,增大不规则物料与夹持结构的接触面积,增加加持效果;
25.而且,当物料为扁平状物料时,识别装置可对物料标签上的二维码进行识别,判断物料的重量,若物料重量大于预设值时,则同时采用第一夹持结构个第二夹持结构的吸盘进行吸附,增加对物料的吸附效果,若物料重量低于预设值时,则只采用单一的吸盘进行吸附,节约设备能耗。
26.本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
27.通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
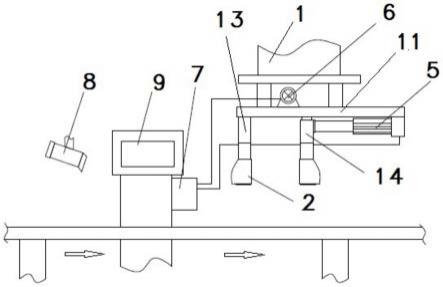
28.图1为本发明的结构示意图;
29.图2为本发明的夹持结构示意图;
30.图3为本发明的夹持件结构示意图;
31.图4为本发明控制机构和识别装置的原理图。
32.图中:1、传送臂;2、夹持件;3、吸盘;4、夹持带;5、驱动装置;6、气泵;7、控制器;8、摄像头;9、处理器;10、防滑层;11、连接座;12、防滑条;13、第一连接架;14、第二连接架。
具体实施方式
33.下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
34.如图1至图4所示,本实施例公开一种仓储码垛机器人取料装置,包括取料机构、控制机构和识别装置;
35.所述取料机构与所述机器人的传送臂1连接,所述传送臂1控制所述取料机构移动,所述取料机构包括第一夹持结构和第二夹持结构,所述第一夹持结构和第二夹持结构均包括夹持件2、吸盘3和夹持带4,所述吸盘3设置于夹持件2底部,所述夹持带4设置于夹持件2侧面;
36.所述控制机构包括驱动装置5、气泵6和控制器7,所述驱动装置5与所述夹持件2连接,控制所述夹持件2进行夹取或松放物料,所述气泵6与所述第一夹持结构和第二夹持结构的吸盘3连接,所述控制器7分别与所述驱动装置5、传送臂1和气泵6连接,分别控制驱动装置5和气泵6的启停,并控制所述传送臂1的运动;
37.所述识别装置包括摄像头8和处理器9,所述处理器9分别与所述摄像头8和所述控制器7连接,所述摄像头8获取物料信息,并将物料信息传送至所述处理器9,所述处理器9对所述物料信息进行识别判断,根据所述物料信息向所述控制器7发送信号,使所述控制器7控制所述驱动装置5或所述气泵6运转。
38.具体地,所述取料机构通过通过第一夹持结构和第二夹持结构相互作用进行夹取动作,可将物料从传动带上夹取,同时,气泵6通过气阀分别与两个吸盘3连接,所述气阀与所述控制器7连接,所述处理器9根据物料信息向所述控制器7发送控制信息,使控制器7控
制气阀通断,实现气泵6与吸盘3之间的通断;
39.所述识别装置的摄像头8通过支架安装于传送带顶部,所述摄像头8与所述控制器7连接,所述控制器7根据所述处理器9发送的信息,可控制摄像头8开关。
40.优选地,所述物料信息包括物料形状信息,所述摄像头8获取物料的图像信息,并将所述图像信息传送至所述处理器9,所述处理器9对所述图像信息进行识别,以确定物料的形状。
41.所述处理器9根据所述物料形状信息判断物料的形状;
42.若物料为扁平状,所述处理器9向所述控制器7发送控制信号,所述控制器7控制所述传送臂1将所述吸盘3传送至物料上方,并控制所述气泵6开启和所述气阀打开,通过吸盘3对物料进行吸附取料,之后所述控制器7控制所述传送臂1对物料进行移动码垛;
43.若物料为方形箱状,所述处理器9向所述控制器7发送控制信号,所述控制器7控制所述传送臂1将夹持件2传送至物料上方相应位置,并控制所述驱动装置5启动,带动两个夹持件2对物料进行夹持,之后所述控制器7控制所述传送臂1对物料进行移动码垛;
44.若物料为不规则形状,所述处理器9向所述控制器7发送控制信号,所述控制器7控制所述传送臂1将夹持带4传送至物料上方相应位置,并控制所述驱动装置5启动,带动所述夹持带4对物料进行绑紧夹持,之后所述控制器7控制所述传送臂1对物料进行移动码垛。
45.具体地,所述摄像头8倾斜安装于传送带顶部,倾斜的摄像头8通过拍照获取物料的立体图像信息,并将信息传送至处理器9,处理器9根据预先设置的相关识别程序,识别并确定物料的具体形状,并判断物料形状为扁平状、方形箱状或不规则形状,并根据物料具体形状,向控制器7发送控制信息,控制传送臂1移动至相应位置,并控制相应的取料部件进行取料,取料完成后,传送臂1按照常规码垛机器人的码垛方式进行码垛;其中,所述传送臂1在夹取前的初始位置,可根据具体工作环境尺寸进行设置。
46.优选地,所述物料信息包括物料重量信息,所述物料重量信息通过条形码或二维码设置于物料的标签上,所述摄像头8设置于输送所述物料的传送带顶部,摄像头8将所述物料上的条形码或二维码信息反馈至所述处理器9,所述处理器9识别所述摄像头8反馈的条形码或二维码信息,以确定所述条形码或二维码所对应的物料重量。
47.所述物料为扁平状时,所述处理器9根据所述物料形物料重量信息,判断物料的重量是否高于所述处理器9的预设值;
48.若物料重量低于预设值,所述处理器9向所述控制器7发送控制信号,所述控制器7控制所述气泵6开启,并打开相应的气阀,控制所述第一夹持结构或所述第二夹持结构的吸盘3工作,对扁平物料进行吸附取料;
49.若物料重量高于预设值,所述处理器9向所述控制器7发送控制信号,所述控制器7控制所述气泵6开启,并打开相应的气阀,控制所述第一夹持结构和所述第二夹持结构的吸盘3同时工作,同时对扁平物料进行吸附取料。
50.具体地,物料在传送带上输送时,确保物料的标签处于物料上方,所述摄像头8将标签上的条形码或二维码信息传送至处理器9,处理器9根据预先设置的相关识别程序,识别物料的具体重量,并判断物料重量是否超过预设值,若高于预设值,则采用双吸盘3对扁平状物料进行吸取,分担单个吸盘3的负荷,增加吸取的稳定性,若低于预设值,则表示单一吸盘3即可满足吸取要求,无需两个吸盘3同时工作,节省设备能耗。
51.优选地,所述夹持件2内部设置有空腔,所述吸盘3位于所述空腔内,且所述吸盘3的下表面略突出于所述夹持件2的下表面。
52.具体地,吸盘3顶部与所述空腔内壁相贴合,所述吸盘3的导气管穿过空腔与吸气泵6连接,将吸盘3设置于夹持件2内部,可节省夹持机构的整体占用空间,减少加持过程中传送臂1的行程,同时,可利用夹持件2的外壁对吸盘3进行保护,增加吸盘3使用寿命。
53.优选地,所述第一夹持结构与所述传送臂1固定连接,所述第二夹持结构与所述传送臂1活动连接,所述的驱动装置5与所述第二夹持结构连接,控制所述第二夹持结构相对于所述第一夹持结构进行移动。
54.具体地,采用此结构,驱动装置5只需控制第二夹持结构即可完成夹取,简化了夹取结构,降低设备故障率。
55.优选地,所述第一夹持结构和第二夹持结构均包括连接架,所述第一夹持结构和第二夹持结构均通过连接架与所述传送臂1连接,所述夹持件2安装于所述连接架底部,所述的夹持带4一端与所述夹持件2连接,另一端与所述连接架底部连接。
56.具体地,通过增加连接架,使得夹持带4得到有效固定,同时使得夹持带4在进行夹持时,夹持带4两端受力均匀。
57.优选地,所述传送臂1通过连接座11分别与所述第一夹持结构和所述第二夹持结构连接,所述连接架包括第一连接架13和第二连接架14,所述第一夹持结构通过第一连接架13与所述连接座11固定连接,所述第二夹持结构通过第二连接架14与所述连接座11滑动连接,所述驱动装置5为驱动气缸,所述驱动气缸的安装端与所述连接座11连接,所述驱动气缸的伸缩端与所述第二连接架14连接。
58.具体地,所述第二连接架14顶部设置有滑块,所述连接座11底部设置有与所述滑块相配合的滑道,所述驱动气缸与第二连机架连接,可控制第二连接架14相对于所述连接座11发生移动。
59.优选地,所述夹持件2侧面设置有与物料相配合的防滑条12,所述夹持带4为多个,且所述夹持带4外部设置有防滑层10。
60.具体地,所述防滑条12为橡胶条,通过增加防滑条12,可增加夹持件2在夹取物料时的摩擦力,防止物料外包装光滑而发生脱落;所述夹持带4为尼龙带,所述防滑层10为胶粘于夹持带4外部的橡胶层。
61.在本发明中,所述的传送臂1、处理器9、控制器7、摄像头8和驱动气缸均可由市场采购获取,均为市面常规型号产品,并无其他特殊设计,在此不做详细赘述。
62.本发明在工作时,物料由传送带传送经过摄像头8底部,摄像头8获取物料的图像信息和标签上条形码的重量信息,并将相应信息传送至处理器9,处理区识别并确定物料的形状和重量;
63.当物料为方形箱状时,如产品包装箱或其他类方形包装箱,处理器9根据物料形状信息向控制器7发送控制信息,控制器7控制传送臂1移动,将第一连接架13夹持件2传送至物料一侧,之后控制器7控制驱动装置5伸出,带动第二连接架14上的加持件移动对物料进行夹持,之后控制器7控制传送臂1带动物料移动,并将物料进行码垛;
64.当物料为不规则形状时,如编织袋包裹、不规则形状器件、或按照不规则形状器件外形进行包覆的包装品等不规则形状物料,处理器9根据物料形状信息向控制器7发送控制
信息,控制器7控制传送臂1移动,第一连接架13夹持带4传送至物料一侧,之后控制器7控制驱动装置5伸出,带动第二连接架14上的加持带移动对物料进行绑紧夹持,之后控制器7控制传送臂1带动物料移动,并将物料进行码垛;
65.当物料为扁平状时,如衣物包装袋、信封包装或板材等扁平状物料,处理器9判断物料的重量信息是否超过预设值,本实施例中预设值为5kg;
66.当物料重量小于等于5kg时,处理器9向控制器7发送相应的控制信息,控制器7控制传送臂1将第一夹持结构的吸盘3传送至物料顶部,之后控制器7控制气泵6开启,并打开相应的气阀,使气泵6与第一夹持结构的吸盘3连通,吸取物料,之后控制器7控制传送臂1带动物料移动,并将物料进行码垛;
67.当物料重量大于5kg时,处理器9向控制器7发送相应的控制信息,控制器7控制传送臂1将第一夹持结构的吸盘3传送至物料顶部,并控制驱动装置5伸出,使第一夹持结构的夹持件2和第二夹持结构的夹持件2相靠近,之后控制器7控制气泵6开启,并打开相应的气阀,使气泵6分别两个吸盘3全部连通,两个吸盘3同时吸取物料,之后控制器7控制传送臂1带动物料移动,并将物料进行码垛。
68.本发明的仓储码垛机器人取料装置,可针对不同形状的物料采取不同的取料方式,大大增加了设备的适用范围,同时,可针对物料的重量增加吸盘3数量,增加取料稳定性的同时,又可减少设备能耗。
69.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1