一种同质模块化机器人分布式并行运动学建模方法
一种同质模块化机器人分布式并行运动学建模方法
【技术领域】
1.本发明涉及一种同质模块化机器人分布式并行运动学建模方法,属于机器人运动学建模领域。
背景技术:
2.随着工业自动化的进一步推动,各个领域机器人的应用逐渐普及。性能单一、结构固定的机器人将难以适用载荷多样、需求多样的任务。模块化机器人的概念于1988年提出,该类机器人一般是由多个相同模块(同质)或不同模块(异质)组成,通过模块数量以及相对位置的变化,使机器人重构为新的构型,获得新的功能,以适应多变的工作环境,满足多样化的任务需求。因此,关于模块化机器人的研究可以推动我国机器人领域的进一步发展。
3.与异质模块化机器人相比,同质模块化机器人模块之间可以互相替代,模块扩展性与通用性强,可批量化开展设计、制造、装配和维护等相关工作,易用性较高。因而,同质模块化机器人的应用场景更为广泛。机器人的应用需以运动学建模为基础,同质模块化机器人同样如此。关于同质模块化机器人运动学建模,传统递推式运动建模方法,一部分需要人工读取相关参数,不适用于拓扑结构不固定的模块化机器人,另一部分由于递推操作难以适用于接口数量逐渐增多、运动传递形式逐渐复杂的模块单元。因此,开展同质模块化机器人运动学建模研究具有重要的理论研究价值。
技术实现要素:
4.有鉴于此,本发明提供了一种同质模块化机器人分布式并行运动学建模方法,以实现同质模块化机器人的运动学建模。
5.本发明实施例提供了一种同质模块化机器人分布式并行运动学建模方法,包括:
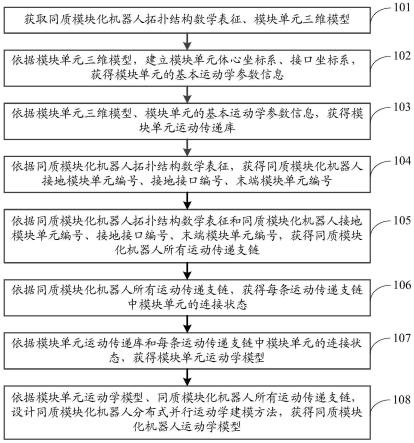
6.获得同质模块化机器人拓扑结构数学表征、模块单元三维模型;
7.依据模块单元三维模型,建立模块单元体心坐标系、接口坐标系,获得模块单元的基本运动学参数信息;
8.依据模块单元三维模型、模块单元的基本运动学参数信息,获得模块单元运动传递库;
9.依据同质模块化机器人拓扑结构数学表征,获得同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号;
10.依据同质模块化机器人拓扑结构数学表征和同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,获得同质模块化机器人所有运动传递支链;
11.依据同质模块化机器人所有运动传递支链,获得每条运动传递支链中模块单元的连接状态;
12.依据模块单元运动传递库和每条运动传递支链中模块单元的连接状态,获得模块单元运动学模型;
13.依据模块单元运动学模型、同质模块化机器人所有运动传递支链,设计同质模块
化机器人分布式并行运动学建模方法,获得同质模块化机器人运动学模型。
14.上述方法中,所述依据模块单元三维模型,建立模块单元体心坐标系、接口坐标系,获得模块单元的基本运动学参数信息,包括:
15.各个旋转轴在体心坐标系下的旋量坐标;
16.各个接口坐标系与体心坐标系的相对位姿关系矩阵;
17.两个接口连接时所存在的连接方位关系矩阵,用于表示接口对接时定位装置的具体对接状态。
18.上述方法中,所述依据模块单元三维模型、模块单元的基本运动学参数信息,获得模块单元运动传递库,包括:
19.依据模块单元三维模型,获得模块单元的接口排布、接口类型、机械结构尺寸、自由度排布信息;
20.依据模块单元的接口排布、接口类型、机械结构尺寸信息,获得模块单元所有有效连接状态;
21.依据模块单元的自由度排布信息、模块单元的基本运动学参数信息,获得模块单元每种有效连接状态所包含的旋转轴、运动学参数;
22.依据模块单元所有有效连接状态、模块单元每种有效连接状态所包含的旋转轴、运动学参数,获得模块单元运动传递库。
23.上述方法中,所述依据模块单元的接口排布、接口类型、机械结构尺寸信息,获得模块单元所有有效连接状态,包括:
24.依据模块单元的接口排布、接口类型,基于枚举法,通过排列组合,获得模块单元所有连接状态;
25.依据模块单元的机械结构尺寸信息和模块单元所有连接状态,剔除存在结构干涉的连接状态,获得模块单元所有有效连接状态。
26.上述方法中,所述依据同质模块化机器人拓扑结构数学表征,获得同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,包括:
27.对包含n
topo_module
个模块的同质模块化机器人拓扑结构,其数学表征为
[0028][0029][0030][0031][0032]
其中,n
topo_module
表示同质模块化机器人拓扑结构中所包含的模块数量;mi(i=1,2,...,n
topo_module
)表示同质模块化机器人拓扑结构中的各个模块编号;矩阵ba称为接地关
系矩阵,bai(i=1,2,...,n
topo_module
)表示同质模块化机器人拓扑结构中模块是否在使用时接地作为基座,bai=0表示模块mi在使用时不接地,bai≠0表示模块mi在使用时bai接口接地地作为基座;矩阵c称为同质模块化机器人的连接关系矩阵,c
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)∈{1,...,n
surf_con
}表示模块mi与模块mj相连接的接口编号,当i=j时,c
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
),n
surf_con
表示单个模块的面接口个数;矩阵co称为同质模块化机器人的连接方位关系矩阵,co
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)表示模块mi与模块mj的连接方位关系,当i=j时,co
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
);
[0033]
依据同质模块化机器人拓扑结构数学表征,包括矩阵m、矩阵ba、矩阵c、矩阵co,获得矩阵c中仅包含一个非零元素的行编号、矩阵ba中非零元素及其所在位置;
[0034]
依据矩阵ba、矩阵ba中非零元素及其所在位置,矩阵ba中非零元素即为接地接口编号,并读取矩阵m中与非零元素所在位置相对应的元素,获得同质模块化机器人接地模块单元编号、接地接口编号;
[0035]
依据矩阵c中仅包含一个非零元素的行编号、矩阵m,读取矩阵m中与行编号相对应位置的元素,获得同质模块化机器人末端模块单元编号。
[0036]
上述方法中,所述依据同质模块化机器人拓扑结构数学表征和同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,获得同质模块化机器人所有运动传递支链,包括:
[0037]
以同质模块化机器人接地模块单元编号的接地接口编号为起点,依次以同质模块化机器人末端模块单元编号为终点,依据同质模块化机器人拓扑结构数学表征中的矩阵c,基于深度优先遍历,搜索同质模块化机器人从起点到终点的运动传递所需要经过的模块及其接口信息,获得同质模块化机器人所有运动传递支链。
[0038]
上述方法中,所述依据模块单元运动传递库和每条运动传递支链中模块单元的连接状态,获得模块单元运动学模型,包括:
[0039]
依据模块单元运动传递库、每条运动传递支链中模块单元的连接状态,获得每条运动传递支链中模块单元在当前连接状态下所包含的旋转轴、运动学参数;
[0040]
依据每条运动传递支链中模块单元在当前连接状态下所包含的旋转轴、运动学参数,获得模块单元运动学模型。
[0041]
上述方法中,所述依据每条运动传递支链中模块单元在当前连接状态下所包含的旋转轴、运动学参数,获得模块单元运动学模型,包括:
[0042]
当模块单元在当前连接状态下所包含的旋转轴为运动学参数为则模块单元的运动输出端位姿与关节角度q间映射关系,即模块单元的位置级运动学模型为
[0043][0044]
其中,θ1,...,θm为各个旋转轴所转过的角度,∑s
in
表示模块单元在当前连接状态下与运动输入端接口坐标系相固连的坐标系,∑s
out
表示模块单元在当前连接状态下与运动输出端接口坐标系相固连的坐标系,∑e表示模块单元的体心坐标系;表示∑s
in
相对
于∑e的齐次变换矩阵,表示∑s
out
相对于∑e的齐次变换矩阵;运动输入端接口指模块单元在当前运动传递支链中靠近接地模块单元的接口,运动输出端接口指模块单元在当前运动传递支链中靠近末端模块单元的接口;是旋量坐标的矩阵形式,
[0045]
模块单元的运动输出端速度旋量与关节运动速度间映射关系,即同质模块化机器人的速度级运动学模型为:
[0046][0047]
其中,当i=2,...,m
tr
时,当i=1时,当i=1时,是的伴随映射,r、p来源于同质模块化机器人从零位状态经刚体变换后所对应的齐次变换矩阵;为各个旋转轴的转动速度;js表示模块单元在当前连接状态下的空间雅可比矩阵。
[0048]
上述方法中,所述依据模块单元运动学模型、同质模块化机器人所有运动传递支链,设计同质模块化机器人分布式并行运动学建模方法,获得同质模块化机器人运动学模型,包括:
[0049]
一条包含n个模块单元的运动传递支链,其末端模块单元位置与关节角度间映射关系,即同质模块化机器人当前运动传递支链的位置级运动学模型为
[0050][0051]
其中,根据模块单元i的位置级运动学获得;表示模块单元i与模块单元i+1连接时的连接方位矩阵,当i=n时,表示末端模块单元与末端执行器连接时的连接方位矩阵;mi表示模块单元i在当前连接状态下所包含的旋转轴个数,θj(j=1,...,mi)为模块单元i在当前连接状态下所包含的第j个旋转轴所转过的角度;
[0052]
一条包含n个模块单元的运动传递支链,其末端模块单元速度旋量与关节角度
间映射关系,即同质模块化机器人当前运动传递支链的速度级运动学模型为
[0053][0054]
其中,是b1...b
n-1
的伴随映射,j
si
(i=1,...,n)表示模块单元i在当前连接状态下的空间雅可比矩阵;表示模块单元i在当前连接状态下所包含的旋转轴转动速度;
[0055]
一个包含δ条运动传递支链的同质模块化机器人,其位置级运动学模型为
[0056][0057]
一个包含δ条运动传递支链的同质模块化机器人,其速度级运动学模型为
[0058][0059]
其中,ni(i=1,...,δ)表示分支中所包含的模块单元个数,表示第i条分支中模块单元j中所包含的旋转轴对应的转动角度。
[0060]
由以上技术方案可以看出,本发明实施例具有以下有益效果:
[0061]
本发明实施例的技术方案中,获得同质模块化机器人拓扑结构数学表征、模块单元三维模型,依据模块单元三维模型,建立模块单元体心坐标系、接口坐标系,获得模块单元的基本运动学参数信息,依据模块单元三维模型、模块单元的基本运动学参数信息,获得模块单元运动传递库,依据同质模块化机器人拓扑结构数学表征,获得同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,依据同质模块化机器人拓扑结构数学表征和同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,获得同
质模块化机器人所有运动传递支链,依据同质模块化机器人所有运动传递支链,获得每条运动传递支链中模块单元的连接状态,依据模块单元运动传递库和每条运动传递支链中模块单元的连接状态,获得模块单元运动学模型,依据模块单元运动学模型、同质模块化机器人所有运动传递支链,设计同质模块化机器人分布式并行运动学建模方法,获得同质模块化机器人运动学模型,因此可以实现同质模块化机器人运动学建模,与同质模块化机器人特点相结合,以模块单元的运动学模型为基础,实现更为高效的模块化机器人运动学建模,为模块化机器人的应用提供模型基础。
【附图说明】
[0062]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单介绍,显而易见,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性和劳动性的前提下,还可以根据这些附图获得其它附图。
[0063]
图1是本发明实施例所提供的同质模块化机器人分布式并行运动学建模方法的流程示意图;
[0064]
图2是本发明实施例中模块单元三维模型示意图;
[0065]
图3是本发明实施例中模块单元坐标系建立示意图;
[0066]
图4是本发明实施例中模块单元运动旋量排布示意图;
[0067]
图5是本发明实施例中同质模块化机器人分布式并行运动学建模与传统递推式运动学建模方法的运算时间对比图。
【具体实施例】
[0068]
为了更好的理解本发明的技术方案,下面结合附图对本发明实施例进行详细描述。
[0069]
应当明确,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0070]
本发明实施例给出一种同质模块化机器人分布式并行运动学建模方法,请参考图1,其为本发明实施例所提供的同质模块化机器人分布式并行运动学建模方法的流程示意图,如图1所示,该方法包括以下步骤:
[0071]
步骤101,获得同质模块化机器人拓扑结构数学表征、模块单元三维模型。
[0072]
具体的,模块单元三维模型如图2所示,1表示两个半球壳连接平面;2、18表示两个半球壳;3、6、11、15表示公接口上的定位装置;4、14表示主动接口的电机模组的力矩输出轴;5、12表示主动接口上的电机模组主体;7、10、13、20表示接口上的机械结构组件;8、9、19、21表示母接口上与定位装置相匹配的定位槽;16表示模块单元体心处的电机模组主体;17表示模块单元体心处的电机模组力矩输出轴;
[0073]
同质模块化机器人拓扑结构数学表征为
[0074]
m=[2,5,7,3,6,4,1]
[0075]
ba=[1,0,0,0,0,0,0]
[0076][0077][0078]
步骤102,依据模块单元三维模型,建立模块单元体心坐标系、接口坐标系,获得模块单元的基本运动学参数信息。
[0079]
具体的,模块单元体心坐标系。接口坐标系如图3所示,运动旋量排布如图4所示,获得模块单元的基本运动学参数信息包括:各个旋转轴在体心坐标系下的旋量坐标;各个接口坐标系与体心坐标系的相对位姿关系矩阵接口坐标系与体心坐标系的相对位姿关系矩阵两个接口连接时所存在的连接方位关系矩阵用于表示接口对接时定位装置的具体对接状态;
[0080]
步骤103,依据模块单元三维模型、模块单元的基本运动学参数信息,获得模块单元运动传递库。
[0081]
具体的,依据模块单元三维模型,获得模块单元的接口排布、接口类型、机械结构尺寸、自由度排布信息;依据模块单元的接口排布、接口类型,基于枚举法,通过排列组合,获得模块单元所有连接状态;依据模块单元的机械结构尺寸信息和模块单元所有连接状态,剔除存在结构干涉的连接状态,获得模块单元所有有效连接状态;依据模块单元的自由度排布信息、模块单元的基本运动学参数信息,获得模块单元每种有效连接状态所包含的旋转轴、运动学参数;依据模块单元所有有效连接状态、模块单元每种有效连接状态所包含的旋转轴、运动学参数,获得模块单元运动传递库。表1为模块单元运动传递库。
[0082]
表1模块单元运动传递库
[0083][0084][0085]
步骤104,依据同质模块化机器人拓扑结构数学表征,获得同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号。
[0086]
具体的,对包含n
topo_module
个模块的同质模块化机器人拓扑结构,其数学表征为
[0087][0088][0089][0090][0091]
其中,n
topo_module
表示同质模块化机器人拓扑结构中所包含的模块数量;mi(i=1,2,...,n
topo_module
)表示同质模块化机器人拓扑结构中的各个模块编号;矩阵ba称为接地关
系矩阵,bai(i=1,2,...,n
topo_module
)表示同质模块化机器人拓扑结构中模块是否在使用时接地作为基座,bai=0表示模块mi在使用时不接地,bai≠0表示模块mi在使用时bai接口接地作为基座;矩阵c称为同质模块化机器人的连接关系矩阵,c
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)∈{1,...,n
surf_con
}表示模块mi与模块mj相连接的接口编号,当i=j时,c
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
),n
surf_con
表示单个模块的面接口个数;矩阵co称为同质模块化机器人的连接方位关系矩阵,co
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)表示模块mi与模块mj的连接方位关系,当i=j时,co
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
);
[0092]
依据同质模块化机器人拓扑结构数学表征,包括矩阵m、矩阵ba、矩阵c、矩阵co,获得矩阵c中仅包含一个非零元素的行编号、矩阵ba中非零元素及其所在位置;
[0093]
依据矩阵ba、矩阵ba中非零元素及其所在位置,矩阵ba中非零元素即为接地接口编号,并读取矩阵m中与非零元素所在位置相对应的元素,获得同质模块化机器人接地模块单元编号、接地接口编号;
[0094]
依据矩阵c中仅包含一个非零元素的行编号、矩阵m,读取矩阵m中与行编号相对应位置的元素,获得同质模块化机器人末端模块单元编号。
[0095]
可知,同质模块化机器人中,接地模块单元编号为2,接地接口编号为1;拓扑结构表征的机器人仅包含1个机器人末端,且机器人模块单元编号为1。
[0096]
步骤105,依据同质模块化机器人拓扑结构数学表征和同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,获得同质模块化机器人所有运动传递支链。
[0097]
具体的,以同质模块化机器人接地模块单元编号的接地接口编号为起点,依次以同质模块化机器人末端模块单元编号为终点,依据同质模块化机器人拓扑结构数学表征中的矩阵c,基于深度优先遍历,搜索同质模块化机器人从起点到终点的运动传递所需要经过的模块及其接口信息,获得同质模块化机器人所有运动传递支链。
[0098]
步骤106,依据同质模块化机器人所有运动传递支链,获得每条运动传递支链中模块单元的连接状态。
[0099]
步骤107,依据模块单元运动传递库和每条运动传递支链中模块单元的连接状态,获得模块单元运动学模型。
[0100]
依据模块单元运动传递库、每条运动传递支链中模块单元的连接状态,获得每条运动传递支链中模块单元在当前连接状态下所包含的旋转轴、运动学参数;依据每条运动传递支链中模块单元在当前连接状态下所包含的旋转轴、运动学参数,获得模块单元运动学模型;
[0101]
当模块单元在当前连接状态下所包含的旋转轴为运动学参数为则模块单元的运动输出端位姿与关节角度q间映射关系,即模块单元的位置级运动学模型为
[0102][0103]
其中,θ1,...,θm为各个旋转轴所转过的角度,∑s
in
表示模块单元在当前连接状态
下与运动输入端接口坐标系相固连的坐标系,∑s
out
表示模块单元在当前连接状态下与运动输出端接口坐标系相固连的坐标系,∑e表示模块单元的体心坐标系;表示σs
in
相对于∑e的齐次变换矩阵,表示∑s
out
相对于∑e的齐次变换矩阵;运动输入端接口指模块单元在当前运动传递支链中靠近接地模块单元的接口,运动输出端接口指模块单元在当前运动传递支链中靠近末端模块单元的接口;是旋量坐标的矩阵形式,
[0104]
模块单元的运动输出端速度旋量与关节运动速度间映射关系,即同质模块化机器人的速度级运动学模型为:
[0105][0106]
其中,当i=2,...,m
tr
时,当i=1时,当i=1时,是的伴随映射,r、p来源于同质模块化机器人从零位状态经刚体变换后所对应的齐次变换矩阵;为各个旋转轴的转动速度;js表示模块单元在当前连接状态下的空间雅可比矩阵。
[0107]
步骤108,依据模块单元运动学模型、同质模块化机器人所有运动传递支链,设计同质模块化机器人分布式并行运动学建模方法,获得同质模块化机器人运动学模型。
[0108]
具体的,一条包含n个模块单元的运动传递支链,其末端模块单元位置与关节角度间映射关系,即同质模块化机器人当前运动传递支链的位置级运动学模型为
[0109][0110]
其中,根据模块单元i的位置级运动学获得;表示模块单元i与模块单元i+1连接时的连接方位矩阵,当i=n时,表示末端模块单元与末端执行器连接时的连接方位矩阵;mi表示模块单元i在当前连接状态下所包含的旋转轴个数,θj(j=1,...,mi)为模块单元i在当前连接状态下所包含的第j个旋转轴所转过的角度;
[0111]
一条包含n个模块单元的运动传递支链,其末端模块单元速度旋量与关节角度间映射关系,即同质模块化机器人当前运动传递支链的速度级运动学模型为
[0112][0113]
其中,是b1...b
n-1
的伴随映射,j
si
(i=1,...,n)表示模块单元i在当前连接状态下的空间雅可比矩阵;表示模块单元i在当前连接状态下所包含的旋转轴转动速度。
[0114]
依据本发明实施例提供的上述方法,进行了仿真。
[0115]
使用分布式并行运动学建模方法和传统递推式运动学建模方法运算100组关节角序列的机器人末端位姿,运算时间如图5所示。通过对比可以得出:在所得运算结果相同情况下,同质模块化机器人分布式并行运动学建模与运算时间减少1个数量级,由此可以证明同质模块化机器人分布式并行运动学建模方法的正确性与有效性。
[0116]
本发明实施例的技术方案具有以下有益效果:
[0117]
本发明实施例的技术方案中,获得同质模块化机器人拓扑结构数学表征、模块单元三维模型,依据模块单元三维模型,建立模块单元体心坐标系、接口坐标系,获得模块单元的基本运动学参数信息,依据模块单元三维模型、模块单元的基本运动学参数信息,获得模块单元运动传递库,依据同质模块化机器人拓扑结构数学表征,获得同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,依据同质模块化机器人拓扑结构数学表征和同质模块化机器人接地模块单元编号、接地接口编号、末端模块单元编号,获得同质模块化机器人所有运动传递支链,依据同质模块化机器人所有运动传递支链,获得每条运动传递支链中模块单元的连接状态,依据模块单元运动传递库和每条运动传递支链中模块单元的连接状态,获得模块单元运动学模型,依据模块单元运动学模型、同质模块化机器人所有运动传递支链,设计同质模块化机器人分布式并行运动学建模方法,获得同质模块化机器人运动学模型,因此可以实现同质模块化机器人运动学建模,与同质模块化机器人特点相结合,以模块单元的运动学模型为基础,实现更为高效的模块化机器人运动学建模,为模块化机器人的应用提供模型基础。
[0118]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
[0119]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1