一种走线机器人及其使用方法与流程
1.本发明涉及线缆检测技术领域,尤其涉及一种走线机器人及其使用方法。
背景技术:
2.随着社会经济的发展,用电量的增大,架空输电线路公里数快速增长。每条线路在竣工投产签均需要对于架空线路本体进行验收工作,对于500kv电压等级输电线路,一般是通过运维人员攀爬杆塔进行架空线路“走线”,而对于110kv以及220kv架空输电线路通常是通过无人机航拍验收架空线路是否存在缺陷。但是对于架空线路走线,其一耗费时间过长,消耗体力过大,往往一档线路需要一上午甚至一天时间,因为需要耗费大量时间在攀爬杆塔以及出线过程,工作效率较低。其二是高空作业存在安全隐患,无法做到绝对安全。而对于无人机航拍,其一无人机无法离导线过近,过近存在“炸机”风险,且拍摄成像可能针对导线本体不够清楚;其二目前的无人机产品无法拍摄架空线路底部面的情况,当缺陷位于架空线路下方时可能无法发现。
3.现有的走线机器人仅能够在无障碍物的线缆上移动,但是架空线路上常设置有中间隔棒或防震锤等零部件,当走线机器人遇到障碍物时无法进行移动,应用范围较小。
4.基于此,亟需一种走线机器人及其使用方法,以解决上述存在的问题。
技术实现要素:
5.基于以上所述,本发明的目的在于提供一种走线机器人及其使用方法,实现了走线机器人遇到障碍物时能够自动跨越,提高了走线机器人的灵活性和应用范围。
6.为达上述目的,本发明采用以下技术方案:
7.一方面,提供一种走线机器人,能够在线缆上移动,所述线缆的长度方向为第一方向,所述走线机器人包括:
8.导轨装置;
9.第一伸缩装置,其第一端连接于所述导轨装置,所述导轨装置能够驱动所述第一伸缩装置沿所述第一方向移动,所述第一伸缩装置的第二端驱动连接于所述线缆且能够沿所述线缆移动;所述第一伸缩装置能够伸缩,以使所述第一伸缩装置的第二端能够连接或脱离所述线缆;
10.第二伸缩装置,其第一端连接于所述导轨装置,所述导轨装置能够驱动所述第二伸缩装置沿所述第一方向移动,所述第二伸缩装置的第二端驱动连接于所述线缆且能够沿所述线缆移动;所述第二伸缩装置能够伸缩,以使所述第二伸缩装置的第二端能够连接或脱离所述线缆;
11.所述第一伸缩装置和所述第二伸缩装置沿第一方向间隔设置;
12.检测装置,其安装于所述导轨装置上,用于检测所述走线机器人所在的环境信息。
13.作为一种走线机器人的优选技术方案,所述检测装置包括摄像头和多个转动臂,多个所述转动臂首尾相连且多个所述转动臂之间通过电机传动铰接,多个所述转动臂的一
端连接于所述导轨装置,另一端设置有所述摄像头。
14.作为一种走线机器人的优选技术方案,所述导轨装置包括横梁、第一驱动组件和第二驱动组件,所述第一驱动组件和所述第二驱动组件沿第一方向间隔安装于所述横梁内,所述第一驱动组件驱动连接于所述第一伸缩装置的第一端,所述第二驱动组件驱动连接于所述第二伸缩装置的第一端。
15.作为一种走线机器人的优选技术方案,所述第一驱动组件包括第一驱动件、第一齿轮和第一齿条,所述第一齿条沿第一方向安装于所述横梁,所述第一驱动件安装于所述第一伸缩装置的第一端且驱动连接于所述第一齿轮,所述第一齿轮与所述第一齿条啮合连接。
16.作为一种走线机器人的优选技术方案,所述第一伸缩装置包括伸缩组件和第三驱动组件,所述伸缩组件一端连接于所述导轨装置,另一端连接于所述第三驱动组件;
17.所述第三驱动组件包括两个夹紧部件和驱动部件,两个所述夹紧部件对称设置于所述线缆两侧,两个所述夹紧部件能够夹紧或松脱所述线缆,所述驱动部件驱动连接于所述线缆。
18.作为一种走线机器人的优选技术方案,所述伸缩组件包括第一壳体、连接杆、第二驱动件、第二齿轮和第二齿条,所述第一壳体连接于所述导轨装置,所述第二齿条安装于所述第一壳体内,所述连接杆一端连接于所述第二驱动件,另一端连接于所述第三驱动组件;所述第二驱动件驱动连接于所述第二齿轮,所述第二齿轮与所述第二齿条啮合连接。
19.作为一种走线机器人的优选技术方案,所述伸缩组件包括第一壳体和气缸,所述气缸安装于所述第一壳体内,所述第三驱动组件连接于所述气缸的输出端。
20.作为一种走线机器人的优选技术方案,所述夹紧部件包括第二壳体、第三驱动件、丝杠、夹紧轮和连接件,所述第三驱动件安装于所述第二壳体内,且所述第三驱动件驱动连接于所述丝杠,所述连接件螺纹连接于所述丝杠,所述夹紧轮转动安装于所述连接件内,两个所述夹紧部件的所述夹紧轮能够抵接于所述线缆的两侧。
21.作为一种走线机器人的优选技术方案,所述夹紧部件还包括压力检测传感器,所述压力检测传感器用于检测所述夹紧轮与所述线缆之间的压力。
22.另一方面,提供一种走线机器人使用方法,应用于以上任一项所述的走线机器人,包括以下步骤:
23.s1、第一伸缩装置和第二伸缩装置分别驱动连接于线缆,并沿所述线缆移动;
24.s2、检测装置检测所述走线机器人所在的环境信息,若检测到障碍物,进行步骤s3;
25.s3、所述第一伸缩装置缩回并沿导轨装置向前移动,跨越所述障碍物后,所述第一伸缩装置伸出并驱动连接于所述线缆;所述走线机器人向前移动至所述障碍物位于所述第二伸缩装置的前方;所述第二伸缩装置缩回并沿导轨装置向前移动,跨越所述障碍物后,所述第二伸缩装置伸出并驱动连接于所述线缆;所述第一伸缩装置和所述第二伸缩装置相对所述导轨装置复位。
26.本发明的有益效果为:
27.本发明提供一种走线机器人及其使用方法,使用时,将走线机器人的第一伸缩装置和第二伸缩装置分别驱动连接于线缆,并沿线缆移动;当检测装置检测到障碍物时,第一
可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
45.在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
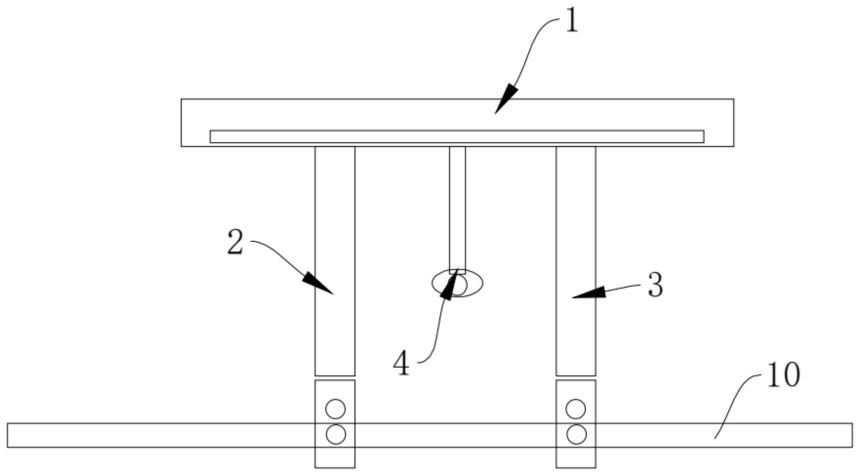
46.如图1-图7所示,本实施例提供一种走线机器人,该走线机器人能够在线缆10上移动,线缆10的长度方向为第一方向,走线机器人包括导轨装置1、第一伸缩装置2、第二伸缩装置3和检测装置4。
47.具体地,第一伸缩装置2的第一端连接于导轨装置1,导轨装置1能够驱动第一伸缩装置2沿第一方向移动,第一伸缩装置2的第二端驱动连接于线缆10且能够沿线缆10移动;第一伸缩装置2能够伸缩,以使第一伸缩装置2的第二端能够连接或脱离线缆10;第二伸缩装置3的第一端连接于导轨装置1,导轨装置1能够驱动第二伸缩装置3沿第一方向移动,第二伸缩装置3的第二端驱动连接于线缆10且能够沿线缆10移动;第二伸缩装置3能够伸缩,以使第二伸缩装置3的第二端能够连接或脱离线缆10;第一伸缩装置2和第二伸缩装置3沿第一方向间隔设置;检测装置4安装于导轨装置1上,用于检测走线机器人所在的环境信息。本实施例中,线缆10为架空线路。
48.使用时,将走线机器人的第一伸缩装置2和第二伸缩装置3分别驱动连接于线缆10,并沿线缆10移动;当检测装置4检测到障碍物101时,第一伸缩装置2缩回并沿导轨装置1向前移动,跨越障碍物101后,第一伸缩装置2伸出并驱动连接于线缆10;走线机器人向前移动至障碍物101位于第二伸缩装置3的前方;第二伸缩装置3缩回并沿导轨装置1向前移动,跨越障碍物101后,第二伸缩装置3伸出并驱动连接于线缆10;第一伸缩装置2和第二伸缩装置3相对导轨装置1复位。本实施例实现了走线机器人遇到障碍物101时能够自动跨越,提高了走线机器人的灵活性和应用范围。
49.优选地,如图5和图6所示,检测装置4包括摄像头41和多个转动臂42,多个转动臂42首尾相连且多个转动臂42之间通过电机传动铰接,多个转动臂42的首端连接于导轨装置1,多个转动臂42的末端设置有摄像头41。通过多个转动臂42的铰接传动,能够对摄像头41的位置进行调节,对线缆10和周围环境进行360度无死角的检测,提高了检测装置4的检测范围,解决现有技术中机器人仅能够检测线缆10上表面的问题。本实施例中,转动臂42为三个,相邻转动臂42中的一个设置有电机,电机的输出端连接于另一个转动臂42,通过电机驱动转动臂42转动,精度更高,且能够绕开线缆10,移动至线缆10的另一侧。
50.进一步地,如图3所示,导轨装置1包括横梁11、第一驱动组件12和第二驱动组件13,第一驱动组件12和第二驱动组件13沿第一方向间隔安装于横梁11内,第一驱动组件12驱动连接于第一伸缩装置2的第一端,第二驱动组件13驱动连接于第二伸缩装置3的第一端,实现了第一伸缩装置2和第二伸缩装置3上独立运动。
51.第一驱动组件12包括第一驱动件121、第一齿轮122和第一齿条123,第一齿条123
沿第一方向安装于横梁11,第一驱动件121安装于第一伸缩装置2的第一端且驱动连接于第一齿轮122,第一齿轮122与第一齿条123啮合连接,当第一驱动件121驱动第一齿轮122转动时,第一伸缩装置2能够沿第一齿条123移动。优选地,横梁11上还可设置有滑轨,第一伸缩装置2滑动连接于滑轨,提高移动精度。第二驱动组件13与第一驱动组件12结构相同,此处不再赘述。
52.更进一步地,如图4所示,第一伸缩装置2包括伸缩组件21和第三驱动组件22,伸缩组件21一端连接于导轨装置1,另一端连接于第三驱动组件22,伸缩组件21能够驱动第三驱动组件22向靠近或远离线缆10的方向移动;第三驱动组件22包括两个夹紧部件221和驱动部件222,两个夹紧部件221对称设置于线缆10两侧,两个夹紧部件221能够夹紧或松脱线缆10,驱动部件222驱动连接于线缆10。当第一伸缩装置2需要脱离线缆10时,夹紧部件221先松脱线缆10,然后伸缩组件21驱动第三驱动组件22向远离线缆10的方向移动。当第一伸缩装置2需要连接于线缆10时,伸缩组件21驱动第三驱动组件22向靠近线缆10的方向移动,然后夹紧部件221夹紧线缆10,驱动部件222驱动第一伸缩装置2沿线缆10移动。
53.本实施例中,伸缩组件21包括第一壳体211、连接杆212、第二驱动件213、第二齿轮214和第二齿条215,第一壳体211连接于导轨装置1,第二齿条215安装于第一壳体211内,连接杆212一端连接于第二驱动件213,另一端连接于第三驱动组件22;第二驱动件213驱动连接于第二齿轮214,第二齿轮214与第二齿条215啮合连接,当第二驱动件213驱动第二齿轮214转动时,连接杆212能够沿第二齿条215移动,实现了第三驱动组件22向靠近或远离线缆10的方向移动。优选地,第一壳体211上还可设置有滑轨,连接杆212滑动连接于滑轨,提高移动精度。在其他实施例中,伸缩组件21包括第一壳体211和气缸,气缸安装于第一壳体211内,第三驱动组件22连接于气缸的输出端,均能够实现第三驱动组件22向靠近或远离线缆10的方向移动。
54.进一步优选地,夹紧部件221包括第二壳体2211、第三驱动件2212、丝杠2215、夹紧轮2213和连接件2214,第三驱动件2212安装于第二壳体2211内,且第三驱动件2212驱动连接于丝杠2215,连接件2214螺纹连接于丝杠2215,夹紧轮2213转动安装于连接件2214内,两个夹紧部件221的夹紧轮2213能够抵接于线缆10的两侧。其中,第三驱动件2212能够驱动夹紧轮2213向靠近或远离线缆10的方向移动,当两个夹紧轮2213均抵接于线缆10时,实现夹紧线缆10,当两个夹紧轮2213向远离线缆10的方向移动时,实现松脱线缆10。本实施例通过设置夹紧轮2213,一方面实现与线缆10固定连接,另一方面,夹紧轮2213还能够起到辅助传动的作用,提高走线机器人移动的平稳性。
55.优选地,夹紧部件221还包括压力检测传感器,压力检测传感器用于检测夹紧轮2213与线缆10之间的压力,当第一伸缩装置2和第二伸缩装置3二者中的一个脱离线缆10时,另一个可适当增加夹紧力,保证走线机器人在线缆10上的稳定性。
56.本实施例中,驱动部件222包括驱动轮2221和第四驱动件2222,第四驱动件2222固定于第二壳体2211内,第四驱动件2222驱动连接于驱动轮2221,当驱动轮2221抵接于线缆10时,驱动轮2221转动能够驱动走线机器人沿线缆10移动。
57.本实施例,第一伸缩装置2和第二伸缩装置3结构相同,此处不再赘述。
58.进一步地,该走线机器人还包括pda(personal digital assistant,掌上电脑)、感应监测模块和cpu中央处理系统。pda用于操控走线机器人,可实现自动或手动控制走线
机器人;感应监测模块用于夹紧轮2213压力检测,检测装置4画面成型,以及检测第一伸缩装置2和第二伸缩装置3距离障碍物101的距离。cpu中央处理系统用于走线机器人跨越障碍物101的动作逻辑以及动作指令发送。
59.优选地,走线机器人还设置有可充电式蓄电池,靠线缆10的感应取电充电以及运转,如果线路不带电则靠自身蓄电池续航。
60.需要说明的是,本实施例还提供一种走线机器人使用方法,应用于上述的走线机器人,包括以下步骤:
61.s1、第一伸缩装置2和第二伸缩装置3分别驱动连接于线缆10,并沿线缆10移动;
62.s2、检测装置4检测走线机器人所在的环境信息,若检测到障碍物101,进行步骤s3;其中,环境信息包括检测障碍物101以及检测线缆10的状态。
63.s3、如图7所示,第一伸缩装置2缩回并沿导轨装置1向前移动,跨越障碍物101后,第一伸缩装置2伸出并驱动连接于线缆10;走线机器人向前移动至障碍物101位于第二伸缩装置3的前方;第二伸缩装置3缩回并沿导轨装置1向前移动,跨越障碍物101后,第二伸缩装置3伸出并驱动连接于线缆10;第一伸缩装置2和第二伸缩装置3相对导轨装置1复位。
64.其中,在第一伸缩装置2跨越后,如果横向移动过程中检测装置4位置不对亦可通过导轨装置1移动即可。
65.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1