一种安全型医用多功能剪刀的制作方法
1.本发明涉及医用剪刀技术领域,具体涉及一种安全型医用多功能剪刀。
背景技术:
2.众所周知,在医疗护理或者手术过程中,剪刀作为一种进行裁剪的辅助工具被广泛应用。
3.经检索,2016年11月23日授权公告的,公开号为cn205704302u的中国专利公开了一种多功能医用剪刀及带有该医用剪刀的放置装置,其大致描述为,包括第一夹紧部和第二夹紧部,第一夹紧部和第二夹紧部的前端通过枢轴连接,第一夹紧部与第二夹紧部的尾部分别设有第一手柄和第二手柄,第一手柄和第二手柄上均开设有握持部,在第一夹紧部与第二夹紧部的前端内侧位置对应开设有两个半圆形拔针槽,两个半圆形拔针槽围成一用于夹紧并拔出输液瓶针头的夹紧槽,位于半圆形拔针槽内的边缘处均匀设有用于卡设输液瓶针头的三角形凹槽,其在使用时,握住握持部,以枢轴为支撑使第一夹紧部和第二夹紧部相对靠近实现剪切等操作。
4.上述的多功能医用剪刀虽然丰富了功能,但是其结构较为固定,一把该多功能医用剪刀只具备上述的两种功能,使用灵活性较差,并且使用后消毒时需要对剪刀的整体进行消毒,同时使用过程中第一手柄和第二手柄所配合形成动力臂较为固定,使用过程中不易调节,现有的专利解决方案中例如cn202283266u涉及一种双柄体医用多功能组合工具,组合器械双柄体的一端设置有钳子,钳子绕组合器械双柄体上的轴转动,在组合器械双柄体的两个手柄端分别设置有镊子、手术刀柄;剪子、止血钳,该种设计的优点是将不同功能的手术器械组合在一起,即可以组合使用,也可以拆分单独使用,但是其虽然可以实现多个功能部件的独立拆分使用,但是其清洗时依然需要一体同步清洗。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种安全型医用多功能剪刀,其执行部可以拆卸更换,使用过程中可以根据使用需要选取对应的执行部,使用灵活性较好,并且多个执行部的更换操作较为简单,在允许的情况下,使用后可以只对执行部进行消毒,较为节约医疗资源,同时驱动力臂可以调节,较为实用。
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:一种安全型医用多功能剪刀,包括枢轴,还包括两个剪刀枢块、两个上快接系统、多个执行部和两个下驱动系统,两个所述剪刀枢块之间通过枢轴转动连接,两个所述上快接系统分别包括左滑动杆和右滑动杆,所述左滑动杆和右滑动杆分别与两个剪刀枢块滑动连接,左滑动杆和右滑动杆均通过定位簧连接有固定杆,两个所述固定杆分别与两个剪刀枢块固定连接,左滑动杆和两个固定杆中的一个固定杆设置有左推动环,右滑动杆上和另一个固定杆设置有右推动环,其中执行部包括
多种相互配合的左夹紧组件和右夹紧组件,左夹紧组件和右夹紧组件的底端均固定连接有分别与左滑动杆和右滑动杆匹配的连接环,所述下驱动系统包括两个连接驱动筒,两个所述连接驱动筒分别固定连接在两个剪刀枢块的底端,两个连接驱动筒内均安装有驱动杆,两个驱动杆均安装有驱动部。
9.在前述方案的基础上优选的,所述驱动部包括手持环,所述手持环上固定连接有连接杆,所述驱动杆上开设有连接槽,所述连接杆转动连接在所述连接槽内。
10.在前述方案的基础上进一步的,所述连接驱动筒上开设有多个定位口,所述连接杆上开设有内调节槽,连接杆上固定连接有与所述定位口相匹配的定位块。
11.在前述方案的基础上再进一步的,两个所述剪刀枢块上均开设有燕尾滑动槽,所述左滑动杆的底端和右滑动杆的底端均固定连接有燕尾滑动块,两个所述燕尾滑动块分别滑动连接在两个所述燕尾滑动槽内。
12.在前述方案的基础上更进一步的,所述左滑动杆、右滑动杆上和两个固定杆上均开设有渐变坡槽,所述左推动环位于左滑动杆上的渐变坡槽内,所述右推动环位于右滑动杆上的渐变坡槽内。
13.作为上述方案进一步的,两个所述连接环内均固定连接有快接条,左滑动杆上、右滑动杆上和两个固定杆上均开设有与所述快接条相匹配快接槽。
14.作为上述方案再进一步的,所述左滑动杆的顶端、右滑动杆的顶端和两个固定杆的顶端均设置有渐变倒角。
15.作为上述方案更进一步的,两个所述连接杆前后匹配设置,且两个连接杆的相对的一面位于同一平面上。
16.作为上述方案进一步的方案,所述内调节槽的高度大于连接驱动筒的高度。
17.作为上述方案再进一步的方案,所述手持环嵌入安装有防硌橡胶环,所述防硌橡胶环与手持环相互接触的部位平滑过渡。
18.(三)有益效果
19.与现有技术相比,本发明提供了一种安全型医用多功能剪刀,具备以下有益效果:
20.1.本发明中,通过上快接系统的设计,可以实现执行部的安装,使用过程中可以根据使用需要选取对应的执行部,使用灵活性较好。
21.2.本发明中,通过左推动环和右推动环的安装,便于左滑动杆和右滑动杆分别相对于两个固定杆的推动,从而便于执行部的拆卸,多个执行部的更换操作较为简单,在允许的情况下,使用后可以只对执行部进行消毒,较为节约医疗资源。
22.3.本发明中,通过驱动杆和连接驱动筒的配合,便于驱动力臂的调节,通过驱动部的设计,辅助实现驱动杆驱动的同时能够实现夹紧操作后残留夹角的调节,从而便于配合多种执行部的安装使用。
附图说明
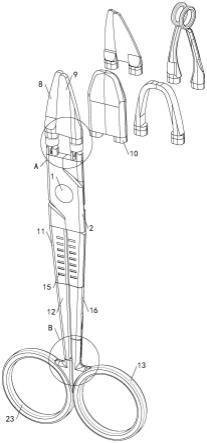
23.图1为本发明整体的立体结构示意图;
24.图2为本发明图1中a处的局部放大结构示意图;
25.图3为本发明图1中b处的局部放大结构示意图;
26.图4为本发明枢轴、剪刀枢块和左滑动杆等配合的立体结构示意图;
27.图5为本发明右滑动杆、固定杆和左推动环等配合的立体结构示意图;
28.图6为本发明驱动杆的立体结构示意图。
29.图中:1、枢轴;2、剪刀枢块;3、左滑动杆;4、右滑动杆;5、固定杆;6、左推动环;7、右推动环;8、左夹紧组件;9、右夹紧组件;10、连接环;11、连接驱动筒;12、驱动杆;13、手持环;14、连接杆;15、定位口;16、内调节槽;17、定位块;18、燕尾滑动块;19、渐变坡槽;20、快接条;21、快接槽;22、渐变倒角;23、防硌橡胶环。
具体实施方式
30.实施例
31.请参阅图1-6,一种安全型医用多功能剪刀,包括枢轴1,还包括两个剪刀枢块2、两个上快接系统、多个执行部和两个下驱动系统,两个剪刀枢块2之间通过枢轴1转动连接,两个上快接系统分别包括左滑动杆3和右滑动杆4,左滑动杆3和右滑动杆4分别与两个剪刀枢块2滑动连接,两个剪刀枢块2上均开设有燕尾滑动槽,左滑动杆3的底端和右滑动杆4的底端均固定连接有燕尾滑动块18,两个燕尾滑动块18分别滑动连接在两个燕尾滑动槽内,使左滑动杆3和右滑动杆4分别相对于两个剪刀枢块2之间的滑动方向性较好,左滑动杆3和右滑动杆4均通过定位簧连接有固定杆5,两个固定杆5分别与两个剪刀枢块2固定连接,可以实现执行部的安装,使用过程中可以根据使用需要选取对应的执行部,使用灵活性较好,左滑动杆3和两个固定杆5中的一个固定杆5设置有左推动环6,右滑动杆4上和另一个固定杆5设置有右推动环7,通过左推动环6和右推动环7的安装,便于左滑动杆3和右滑动杆4分别相对于两个固定杆5的推动,从而便于执行部的拆卸,多个执行部的更换操作较为简单,在允许的情况下,使用后可以只对执行部进行拆卸消毒,较为节约医疗资源,左滑动杆3、右滑动杆4上和两个固定杆5上均开设有渐变坡槽19,左推动环6位于左滑动杆3上的渐变坡槽19内,右推动环7位于右滑动杆4上的渐变坡槽19内,通过推动左推动环6和右推动环7,便于分别相对于两个固定杆5驱动左滑动杆3和右滑动杆4,其中执行部包括多种相互配合的左夹紧组件8和右夹紧组件9,左夹紧组件8和右夹紧组件9的底端均固定连接有分别与左滑动杆3和右滑动杆4匹配的连接环10,两个连接环10内均固定连接有快接条20,左滑动杆3上、右滑动杆4上和两个固定杆5上均开设有与快接条20相匹配快接槽21,左滑动杆3的顶端、右滑动杆4的顶端和两个固定杆5的顶端均设置有渐变倒角22,便于插入连接环10时的引导。
32.还需进一步说明的是,下驱动系统包括两个连接驱动筒11,两个连接驱动筒11分别固定连接在两个剪刀枢块2的底端,两个连接驱动筒11内均安装有驱动杆12,通过驱动杆12和连接驱动筒11的配合,便于驱动力臂的调节,实用性较好,连接驱动筒11上开设有多个定位口15,连接杆14上开设有内调节槽16,内调节槽16的高度大于连接驱动筒11的高度,便于连接杆14的调节,连接杆14上固定连接有与定位口15相匹配的定位块17,便于连接杆14在连接驱动筒11内的调节,可以实现连接杆14和连接驱动筒11配合形成的驱动力臂的调整后的定位,两个驱动杆12均安装有驱动部,驱动部包括手持环13,手持环13嵌入安装有防硌橡胶环23,防硌橡胶环23与手持环13相互接触的部位平滑过渡,提高手持环13与手指接触部位的弹性效果和摩擦效果,手持环13上固定连接有连接杆14,驱动杆12上开设有连接槽,连接杆14转动连接在连接槽内,辅助实现驱动杆12驱动的同时能够实现夹紧操作后残留夹角的调节,从而便于配合多种执行部的安装使用,两个连接杆14前后匹配设置,且两个连接
杆14的相对的一面位于同一平面上,在操作过程中,使两个连接杆14可以相互岔开,实现操作过程中两个手持环13的运动方向的引导。
33.综上所述,该安全型医用多功能剪刀的工作原理和工作过程为,在使用时,首先根据使用需要选取匹配的执行部,其中执行部中的左夹紧组件8和右夹紧组件9可以是剪刀也可以是夹子甚至是镊子等器械,执行部选取完成后将左夹紧组件8和右夹紧组件9分别安装在左滑动杆3上和右滑动杆4上,安装过程中只需将左夹紧组件8的底端的连接环10和右夹紧组件9的底端的连接环10分别插在左滑动杆3上和右滑动上,使连接环10内的快接条20卡入快接槽21内,完成左夹紧组件8和右夹紧组件9的安装,安装完成后通过手持环13进行操作即可,特殊情况下可以相对于驱动杆12转动连接杆14,实现紧操作后残留夹角的调节,同时若操作过程中所需要的驱动力较大时,可以调节增大连接驱动筒11和驱动杆12两者配合形成的驱动力臂,调节过程中捏紧驱动杆12,由于驱动杆12上开设有内调节槽16,所以位于驱动杆12上前后两端的定位块17相互靠近,从而退出连接驱动筒11上的定位口15,使驱动杆12在连接驱动筒11内的定位作用失效,使驱动杆12可以在连接驱动筒11内进行滑动调节,调节过程中将驱动杆12从连接驱动筒11内拉出适宜长度,实现驱动力臂的调节,调节完成后松开捏紧驱动杆12的力,使驱动杆12的形变恢复原状,此时驱动杆12上的定位块17重新进入多个定位口15中对应的定位口15内,实现调整完成后的定位。
34.因此本发明中通过左推动环和右推动环的安装,便于左滑动杆和右滑动杆分别相对于两个固定杆的推动,从而便于执行部的拆卸,多个执行部的更换操作较为简单,在允许的情况下,使用后可以只对执行部进行消毒,较为节约医疗资源。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1