一种六轴并联抓取设备的制作方法
1.本发明涉及六轴并联技术领域,具体为一种六轴并联抓取设备。
背景技术:
2.并联机构,可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。在自动化生产线中,并联机构得到了广泛引用,尤其是六轴并联机构,因为其具有结构紧凑、精度较高、承载能力大、无累积误差等特点,在无须很大工作空间的领域内得到了广泛应用。
3.六轴并联机器人的结构由上下两个平台组成,其中静平台固定,并且动平台与静平台通过六个伸缩缸及虎克铰连接,虎克铰或球铰位于静平台与六个伸缩缸的连接处,对保证平台的正常运行和整个结构刚度起着关键作用。但是,现有的用于六轴并联机器人的动平台对物料的抓取通常是借助一根输气管和吸嘴来完成,在工作时,尤其是在对金属物料进行抓放时,由于动平台在工作过程中需要快速的来回摆动,导致在抓放过程中,吸嘴难以进一步延伸至收纳盒内部,并且只能在有限的高度将金属物料抛至收纳盒内,因此当物料从较高点被抛至收纳盒内时,物料之间会发生撞击,进而产生形变,从而造成物料会被弹出收纳盒外,同时,由于物料本身的惯性,被吸附在吸嘴上的物料会因为吸嘴来回摆动的运动状态导致掉落轨迹发生偏移,从而出现物料不能正确掉落到收纳盒内的现象。为此,我们提出一种六轴并联抓取设备。
技术实现要素:
4.本发明的目的在于提供一种六轴并联抓取设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种六轴并联抓取设备,包括静平台、动平台、补偿机构、伸缩吸嘴和清理机构,静平台与动平台之间相对设置,静平台的下方设置有可对物料进行纠偏的补偿机构,动平台的下方设置有可对伸缩吸嘴下表面进行清理的清理机构,伸缩吸嘴设置在动平台的下方。
6.优选的,补偿机构包括第一气筒,第一气筒设置在动平台的内侧,静平台的内侧滚动连接有第一转向环,第一转向环的下侧固定连接有第一配重块,伸缩吸嘴设置在第一气筒的底端,第一气筒的内侧滚动连接有第二转向环,第二转向环的上侧固定连接有第二配重块,第二转向环的下方设置有第三转向环,第三转向环滚动连接在第一气筒的内侧,第三转向环的下侧固定连接有第三配重块。
7.优选的,静平台上设置有气泵,气泵的底部设置有输气管,第一转向环的下侧固定连接有牵引丝,第一气筒与动平台通过螺栓固定连接,第一气筒包括第一储气管和吊杆,第一储气管固定连接在第二转向环的内侧,吊杆呈t形结构设置,吊杆固定连接在第一气筒的内表面外侧。
8.优选的,第一气筒包括第二储气管和第二气筒,第一储气管的底端贯穿第三转向
环的上表面并延伸至第三转向环的下表面,吊杆与第二气筒均设置在第一气筒的内部,吊杆的外侧设置有第二储气管,第二储气管与吊杆滑动连接。
9.优选的,第一储气管的顶端固定连接有摩擦环,摩擦环的内表面呈圆角结构设置,第一储气管的下方设置有第一喷头,第一储气管包括第四配重块和第一伸缩气囊,第四配重块与第一伸缩气囊均设置在第一储气管的内部。
10.优选的,第一伸缩气囊固定连接在第一储气管的内表面底部,第一伸缩气囊设置在第四配重块的下侧,第四配重块与第一储气管滑动连接,第四配重块与牵引丝固定连接,牵引丝的外表面与摩擦环的内表面间隙配合设置。
11.优选的,第一伸缩气囊与第一储气管滑动连接,第一伸缩气囊与第一喷头同轴心,第一喷头固定连接在第一伸缩气囊的底端,第一伸缩气囊的内部设置有第一复位弹簧。
12.优选的,第二气筒的外侧设置有加强筋,第二气筒与第二储气管通过加强筋固定连接,清理机构包括第二喷头,第二喷头设置在第二储气管的下方。
13.优选的,吊杆的底端固定连接有活塞片,活塞片的下侧设置有密封塞,吊杆的外侧滑动连接有第二复位弹簧,第二复位弹簧设置在第二储气管的内部,第二复位弹簧设置在活塞片的上侧,第二储气管的内表面安装有第一气体单向阀。
14.优选的,第二储气管的外表面固定连接有第一导气管,第一导气管的外表面设置有第二导气管,第二导气管呈l形结构设置,第二导气管的一端与第一导气管固定连接,且第二导气管的另一端与汇集盖固定连接,汇集盖的底端固定连接在第二喷头的内表面底部。
15.优选的,第二气筒包括第二伸缩气囊,第二伸缩气囊滑动连接在第二气筒的内表面,第二伸缩气囊的底端固定连接在第二气筒的内表面底部,第二伸缩气囊的底端设置有下弯管,下弯管的一端与第二伸缩气囊连接,且下弯管的另一端与第二储气管连接,下弯管的内表面安装有第二气体单向阀,第二伸缩气囊的顶端设置有出气管,出气管的顶端设置有上弯管。
16.优选的,第二伸缩气囊的内部设置有第四复位弹簧,第二气筒的内表面固定连接有机关块,上弯管与机关块滑动连接,上弯管的外表面固定连接有限位棒,机关块的一侧设置有补气管,补气管的一端与机关块连接,且补气管的另一端贯穿第二储气管的外表面并延伸至第二储气管的内表面。
17.优选的,第二喷头的内侧设置有多个上弯喷头,上弯喷头呈圆周分布设置,第二喷头的下侧固定连接有撞头,撞头的下侧设置有缓冲垫,第二喷头的内表面底部固定连接有球顶,球顶的外侧滚动连接有摆盘,摆盘的横截面为弧形结构设计,摆盘的上表面设置有触发滚珠,上弯喷头的顶端设置有第三复位弹簧,摆盘的下方设置有气帽,上弯喷头的内表面开设有补气腔。
18.本发明至少具备以下有益效果:
19.本发明通过设置第二储气管、吊杆、活塞片、密封塞、第二复位弹簧、第一导气管、第二导气管、汇集盖、第二喷头和上弯喷头,当伸缩吸嘴对物料进行吸取时,伸缩吸嘴会由于第一气筒内的负压处于折叠伸缩状态,使物料推动缓冲垫并使第二储气管向上运动,此时,第二储气管内部活塞片的上部分负压会依次通过上弯喷头、第二喷头、汇集盖、第二导气管、第一导气管吸取的气体来实现平衡,待伸缩吸嘴将物料放下时,第二复位弹簧会对第
二储气管进行拉动,使第二储气管向下运动,此时处于第二复位弹簧附近的气体在密封塞的作用下会依次通过第一导气管、第二导气管、汇集盖、第二喷头、上弯喷头被排出,此时通过上弯喷头排出的气体会直接吹到伸缩吸嘴的下表面,实现快速对伸缩吸嘴的下表面颗粒进行清理。
20.本发明通过设置第二伸缩气囊、下弯管、出气管、上弯管、第四复位弹簧、机关块和补气管,当伸缩吸嘴将物料放下使第二储气管向下运动时,外界气体会通过第一气体单向阀进入到第二储气管内部并停留在密封塞与第一气体单向阀之间,待第二储气管向上运动时候,停留的气体会被挤压并通过第二气体单向阀进入到第二伸缩气囊内部,此时第二伸缩气囊内的气体会因第二气体单向阀的作用不能实现回流,进而使第二伸缩气囊会逐渐向上伸展,当第二伸缩气囊内部的气体达到一定时,上弯管的出气口会与补气管的进气口处于同轴心,此时第二伸缩气囊内积攒的气体可通过上弯管和补气管对第二储气管内部活塞片的上部分区域进行二次补气,从而提高上弯喷头喷出的气体量,待补气过程结束后,第二伸缩气囊会在第四复位弹簧的收缩下再次进行处于折叠状态。
21.本发明通过设置牵引丝、第一储气管、第一喷头、第四配重块、第一伸缩气囊和第一复位弹簧,当动平台相对于静平台做远距离伸展运动并对物料进行吸取时,牵引丝会拉动第四配重块进行向上运动,并将第四配重块的底端与第一伸缩气囊的顶端进行脱离,此时,第一伸缩气囊的顶端会在第一复位弹簧的推动下进行向上伸展,并通过第一喷头将外界的气体吸入到第一伸缩气囊内,待物料被移动至动平台正下方位置并进行释放时,第四配重块会再次压在第一伸缩气囊的顶端并向下滑动,使第一伸缩气囊内的气体通过第一喷头对释放的物料进行吹动,此时,吹动的气体可对掉落过程中的物料进行吸附和纠偏,使物料垂直掉落至收纳盒内,避免物料由于惯性发生掉落。
22.本发明通过设置第一转向环、第一配重块、第二转向环、第二配重块、第三转向环和第三配重块,当第一气筒底端的伸缩吸嘴做水平单向运动对物料进行输送时,第一转向环、第二转向环和三转向环会在第一配重块、第二配重块和第三配重块的作用下做同步转动,使第一喷头反向甩动,待伸缩吸嘴将物料输送至下料位置并即将释放物料时,第一喷头会因为惯性再次反向甩动,此时第一喷头会对掉落的物料进行二次补气,进而有效减小被抛出的物料的偏移量,使物料下降到正确的位置。
23.本发明通过设置球顶、摆盘、触发滚珠、第三复位弹簧和气帽,当第二喷头做水平单向运动时,触发滚珠会因为第二喷头的移动方向做反向滚动,使对应的气帽被关闭,此时通过第二导气管进入的气体会通过其余的上弯喷头对下坠的物料进行补气,进而给与下坠的物料一个反向推力,使下坠的物料能够更好的垂直向下运动。
附图说明
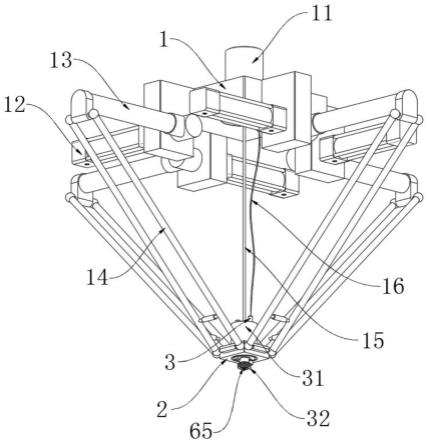
24.图1为本发明整体结构示意图;
25.图2为本发明整体结构侧视图;
26.图3为本发明局部结构侧视图图一;
27.图4为本发明局部结构侧视图图一;
28.图5为本发明局部结构剖视图;
29.图6为本发明图5中的第一储气管剖视图图一;
30.图7为本发明图5中的第一储气管剖视图图二;
31.图8为本发明局部结构侧视图图三;
32.图9为本发明图8中的整体结构剖视图图一;
33.图10为本发明图8中的整体结构剖视图图二;
34.图11为本发明图8中的整体结构剖视图图三;
35.图12为本发明局部结构爆炸图;
36.图13为本发明凸12中的平面结构剖视图图一;
37.图14为本发明凸12中的平面结构剖视图图二。
38.图中:1、静平台;101、第一转向环;102、第一配重块;11、气泵;12、伺服电机;13、主动臂;14、从动臂;15、输气管;16、牵引丝;2、动平台;3、补偿机构;31、第一气筒;32、伸缩吸嘴;33、第二转向环;34、第二配重块;35、第三转向环;36、第三配重块;4、第一储气管;41、摩擦环;42、第一喷头;43、第四配重块;44、第一伸缩气囊;45、第一复位弹簧;5、吊杆;51、活塞片;52、密封塞;53、第二复位弹簧;6、第二储气管;61、第一气体单向阀;62、第一导气管;63、第二导气管;64、汇集盖;65、清理机构;7、第二气筒;71、加强筋;8、第二喷头;81、上弯喷头;82、撞头;83、缓冲垫;84、球顶;85、摆盘;86、触发滚珠;87、第三复位弹簧;88、气帽;89、补气腔;9、第二伸缩气囊;91、下弯管;92、第二气体单向阀;93、出气管;94、上弯管;95、第四复位弹簧;96、机关块;97、限位棒;98、补气管。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.请参阅图1-14,本发明提供一种技术方案:一种六轴并联抓取设备,包括静平台1、动平台2、补偿机构3、伸缩吸嘴32和清理机构65,静平台1与动平台2之间相对设置,静平台1的下方设置有可对物料进行纠偏的补偿机构3,动平台2的下方设置有可对伸缩吸嘴32下表面进行清理的清理机构65,伸缩吸嘴32设置在动平台2的下方,补偿机构3包括第一气筒31,第一气筒31设置在动平台2的内侧,静平台1的内侧滚动连接有第一转向环101,第一转向环101的下侧固定连接有第一配重块102,伸缩吸嘴32设置在第一气筒31的底端,第一气筒31的内侧滚动连接有第二转向环33,第二转向环33的上侧固定连接有第二配重块34,第二转向环33的下方设置有第三转向环35,第三转向环35滚动连接在第一气筒31的内侧,第三转向环35的下侧固定连接有第三配重块36,本发明通过设置第一转向环101、第一配重块102、第二转向环33、第二配重块34、第三转向环35和第三配重块36,当第一气筒31底端的伸缩吸嘴32做水平单向运动对物料进行输送时,第一转向环101、第二转向环33和三转向环会在第一配重块102、第二配重块34和第三配重块36的作用下做同步转动,使第一喷头42反向甩动,待伸缩吸嘴32将物料输送至下料位置并即将释放物料时,第一喷头42会因为惯性再次反向甩动,此时第一喷头42会对掉落的物料进行二次补气,进而有效减小被抛出的物料的偏移量,使物料下降到正确的位置,吊杆5设置在第一气筒31的中心点位置,第二储气管6与伸缩吸嘴32同轴心,第二喷头8的外表面与伸缩吸嘴32的内表面间隙配合设置。
41.根据上述实施例,实施例一,静平台1的一侧安装有伺服电机12,静平台1的另一侧设置有主动臂13,主动臂13上设置有从动臂14,静平台1上设置有气泵11,气泵11的底部设置有输气管15,第一转向环101的下侧固定连接有牵引丝16,第一气筒31与动平台2通过螺栓固定连接,第一气筒31包括第一储气管4和吊杆5,第一储气管4固定连接在第二转向环33的内侧,吊杆5呈t形结构设置,吊杆5固定连接在第一气筒31的内表面外侧,第一气筒31包括第二储气管6和第二气筒7,第一储气管4的底端贯穿第三转向环35的上表面并延伸至第三转向环35的下表面,吊杆5与第二气筒7均设置在第一气筒31的内部,吊杆5的外侧设置有第二储气管6,第二储气管6与吊杆5滑动连接,第一储气管4的顶端固定连接有摩擦环41,摩擦环41的内表面呈圆角结构设置,第一储气管4的下方设置有第一喷头42,第一储气管4包括第四配重块43和第一伸缩气囊44,第四配重块43与第一伸缩气囊44均设置在第一储气管4的内部,第一伸缩气囊44固定连接在第一储气管4的内表面底部,第一伸缩气囊44设置在第四配重块43的下侧,第四配重块43与第一储气管4滑动连接,第四配重块43与牵引丝16固定连接,牵引丝16的外表面与摩擦环41的内表面间隙配合设置,第一伸缩气囊44与第一储气管4滑动连接,第一伸缩气囊44与第一喷头42同轴心,第一喷头42固定连接在第一伸缩气囊44的底端,第一伸缩气囊44的内部设置有第一复位弹簧45,第二气筒7的外侧设置有加强筋71,第二气筒7与第二储气管6通过加强筋71固定连接,清理机构65包括第二喷头8,第二喷头8设置在第二储气管6的下方,吊杆5的底端固定连接有活塞片51,活塞片51的下侧设置有密封塞52,吊杆5的外侧滑动连接有第二复位弹簧53,第二复位弹簧53设置在第二储气管6的内部,第二复位弹簧53设置在活塞片51的上侧,第二储气管6的内表面安装有第一气体单向阀61,摩擦环41的设置,可减小牵引丝16在活动期间的阻力,输气管15的底端贯穿第二转向环33的上表面并延伸至第二转向环33的下表面,输气管15为可弯曲的橡胶软管,本发明通过设置牵引丝16、第一储气管4、第一喷头42、第四配重块43、第一伸缩气囊44和第一复位弹簧45,当动平台2相对于静平台1做远距离伸展运动并对物料进行吸取时,牵引丝16会拉动第四配重块43进行向上运动,并将第四配重块43的底端与第一伸缩气囊44的顶端进行脱离,此时,第一伸缩气囊44的顶端会在第一复位弹簧45的推动下进行向上伸展,并通过第一喷头42将外界的气体吸入到第一伸缩气囊44内,待物料被移动至动平台2正下方位置并进行释放时,第四配重块43会再次压在第一伸缩气囊44的顶端并向下滑动,使第一伸缩气囊44内的气体通过第一喷头42对释放的物料进行吹动,此时,吹动的气体可对掉落过程中的物料进行吸附和纠偏,使物料垂直掉落至收纳盒内,避免物料由于惯性发生掉落。
42.根据上述实施例,实施例二,第二储气管6的外表面固定连接有第一导气管62,第一导气管62的外表面设置有第二导气管63,第二导气管63呈l形结构设置,第二导气管63的一端与第一导气管62固定连接,且第二导气管63的另一端与汇集盖64固定连接,汇集盖64的底端固定连接在第二喷头8的内表面底部,第二气筒7包括第二伸缩气囊9,第二伸缩气囊9滑动连接在第二气筒7的内表面,第二伸缩气囊9的底端固定连接在第二气筒7的内表面底部,第二伸缩气囊9的底端设置有下弯管91,下弯管91的一端与第二伸缩气囊9连接,且下弯管91的另一端与第二储气管6连接,下弯管91的内表面安装有第二气体单向阀92,第二伸缩气囊9的顶端设置有出气管93,出气管93的顶端设置有上弯管94,第二伸缩气囊9的内部设置有第四复位弹簧95,第二气筒7的内表面固定连接有机关块96,上弯管94与机关块96滑动连接,上弯管94的外表面固定连接有限位棒97,机关块96的一侧设置有补气管98,补气管98
的一端与机关块96连接,且补气管98的另一端贯穿第二储气管6的外表面并延伸至第二储气管6的内表面,第二喷头8的内侧设置有多个上弯喷头81,上弯喷头81呈圆周分布设置,第二喷头8的下侧固定连接有撞头82,撞头82的下侧设置有缓冲垫83,第二喷头8的内表面底部固定连接有球顶84,球顶84的外侧滚动连接有摆盘85,摆盘85的横截面为弧形结构设计,摆盘85的上表面设置有触发滚珠86,上弯喷头81的顶端设置有第三复位弹簧87,摆盘85的下方设置有气帽88,上弯喷头81的内表面开设有补气腔89,限位棒97的设置,可对上弯管94的活动轨迹进行控制,同时可有效防止第二伸缩气囊9的上表面发生倾斜,气帽88呈工字形结构设置,气帽88的最大内径小于补气腔89的内径,本发明通过设置第二储气管6、吊杆5、活塞片51、密封塞52、第二复位弹簧53、第一导气管62、第二导气管63、汇集盖64、第二喷头8和上弯喷头81,当伸缩吸嘴32对物料进行吸取时,伸缩吸嘴32会由于第一气筒31内的负压处于折叠伸缩状态,使物料推动缓冲垫83并使第二储气管6向上运动,此时,第二储气管6内部活塞片51的上部分负压会依次通过上弯喷头81、第二喷头8、汇集盖64、第二导气管63、第一导气管62吸取的气体来实现平衡,待伸缩吸嘴32将物料放下时,第二复位弹簧53会对第二储气管6进行拉动,使第二储气管6向下运动,此时处于第二复位弹簧53附近的气体在密封塞52的作用下会依次通过第一导气管62、第二导气管63、汇集盖64、第二喷头8、上弯喷头81被排出,此时通过上弯喷头81排出的气体会直接吹到伸缩吸嘴32的下表面,实现快速对伸缩吸嘴32的下表面颗粒进行清理,并通过设置第二伸缩气囊9、下弯管91、出气管93、上弯管94、第四复位弹簧95、机关块96和补气管98,当伸缩吸嘴32将物料放下使第二储气管6向下运动时,外界气体会通过第一气体单向阀61进入到第二储气管6内部并停留在密封塞52与第一气体单向阀61之间,待第二储气管6向上运动时候,停留的气体会被挤压并通过第二气体单向阀92进入到第二伸缩气囊9内部,此时第二伸缩气囊9内的气体会因第二气体单向阀92的作用不能实现回流,进而使第二伸缩气囊9会逐渐向上伸展,当第二伸缩气囊9内部的气体达到一定时,上弯管94的出气口会与补气管98的进气口处于同轴心,此时第二伸缩气囊9内积攒的气体可通过上弯管94和补气管98对第二储气管6内部活塞片51的上部分区域进行二次补气,从而提高上弯喷头81喷出的气体量,待补气过程结束后,第二伸缩气囊9会在第四复位弹簧95的收缩下再次进行处于折叠状态,并通过设置球顶84、摆盘85、触发滚珠86、第三复位弹簧87和气帽88,当第二喷头8做水平单向运动时,触发滚珠86会因为第二喷头8的移动方向做反向滚动,使对应的气帽88被关闭,此时通过第二导气管63进入的气体会通过其余的上弯喷头81对下坠的物料进行补气,进而给与下坠的物料一个反向推力,使下坠的物料能够更好的垂直向下运动。
43.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
44.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1