一种晶圆周围溢胶修除装置及方法与流程
1.本发明涉及ic芯片制造技术领域,尤其涉及一种晶圆周围溢胶修除装置及方法。
背景技术:
2.ic芯片的制造过程中包含各种工艺过程,其中晶圆在进行烘烤之前必须将贴合好abf胶的晶圆进行压模动作,压模后的abf胶会溢出到晶圆周围,必须把晶圆周围溢胶修除干净后才能进行下一步工艺操作。
3.目前国内的修除溢胶方法是通过人工手持刀具进行,因为晶圆是高精密,脆性物质,人手在修除的过程中,用力不均匀,进刀具不一致的情况下,很容易将晶圆修破,甚至完全报废,采用自动修除溢胶方法至关重要。
4.因此,本技术提供设计一种晶圆周围溢胶修除装置及方法,以解决上述技术问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种晶圆周围溢胶修除装置及方法,采用修胶刀具机构和旋转吸附治具等,实现晶圆受力更加均匀,固定更加牢固,减少由于人工用力不均匀造成晶圆的损坏,有效减弱由于晶圆周围溢胶凹凸不平使修除过程中刀具对晶圆产生的突变应力,保证晶圆品质,提高成品率。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种晶圆周围溢胶修除装置,包括底座、以及安装在底座上的旋转吸附治具,所述旋转吸附治具上放置有晶圆;且所述旋转吸附治具上设有用于顶升吸附晶圆的多个顶升吸附机构;
8.所述旋转吸附治具的外侧部设有多个定位夹具,所述旋转吸附治具的一侧还设有修胶刀具机构;
9.所述修胶刀具机构包括伺服模组、以及设于伺服模组上的浮动刀架机构,所述浮动刀架机构上设有浮动刀头机构,所述浮动刀头机构上设有刀具。
10.优选地,所述定位夹具和顶升吸附机构均为三个,三个定位夹具和三个顶升吸附机构均呈圆周状等间距分布。
11.本发明还提供了一种晶圆周围溢胶修除装置的使用方法,包括以下步骤:
12.步骤1)、上料:晶圆通过人工上料或机械手进入顶升吸附机构顶面,顶升吸附机构真空打开吸附住晶圆,确保每次上料位置一致,然后,顶升吸附机构下降,顶升吸附机构真空断开,晶圆到达旋转吸附治具上;
13.步骤2)、定位:定位夹具向内动作,夹紧晶圆,旋转吸附治具真空打开,吸附住晶圆,定位夹具松开,初定位完成;
14.步骤3)、初修除溢胶:旋转吸附治具携带着晶圆作等速旋转运动,修胶刀具机构随着伺服直线模组向晶圆方向进刀,进刀到一定位置后进行修胶动作,当晶圆随旋转吸附治具旋转2圈,修胶刀具机构会进给0.3mm,如此重复进刀3次,修胶刀具机构随伺服模组退出
至原始位,旋转吸附治具停止旋转,初修溢胶完成;
15.步骤4)、重复定位:重复步骤2),进行晶圆精定位操作;
16.步骤5)、精修除溢胶:重复步骤3)精修过程,吸附治具旋转圈数及刀具机构进刀量可适当调整,精修溢胶完成,旋转吸附治具真空断开,修边完成;
17.步骤6)、下料:顶升吸附机构真空打开,吸附住晶圆,顶起晶圆,然后顶升吸附机构真空断开,人工或机械手取下晶圆,1片晶圆修除溢胶动作完成;
18.步骤7)、重复步骤1)至6)对一批次晶圆进行操作。
19.通过采用上述技术方案:采用修胶刀具机构、旋转吸附治具、顶升吸附机构等,实现晶圆受力更加均匀,固定更加牢固,减少由于人工用力不均匀造成晶圆的损坏,有效减弱由于晶圆周围溢胶凹凸不平使修除过程中刀具对晶圆产生的突变应力,保证晶圆品质,提高成品率。
20.本发明具有以下有益效果:
21.1、本发明采用真空吸附旋转平台替代人工手握晶圆,晶圆受力更加均匀,固定更加牢固,减少由于人工用力不均匀造成晶圆的损坏,保证晶圆品质,提高成品率。
22.2、本发明采用将刀具安装在弹性浮动机构上,有效减弱由于晶圆周围溢胶凹凸不平使修除过程中刀具对晶圆产生的突变应力。
23.3、本发明将刀具机构安装在伺服模组上,确保每次进刀量的一致,使晶圆受力均匀。
附图说明
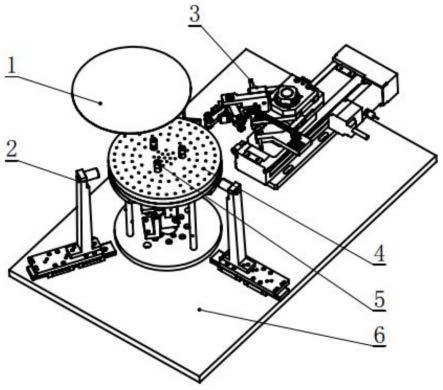
24.图1为本发明的整体结构示意图;
25.图2为图1的俯视图;
26.图3为本发明中修胶刀具机构的结构示意图。
27.图中:1晶圆、2定位夹具、3修胶刀具机构、3-1刀具、3-2浮动刀头机构、3-3浮动刀架机构、3-4伺服模组、4旋转吸附治具、5顶升吸附机构、6底座。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
29.参照图1-图3,一种晶圆周围溢胶修除装置,包括底座6、以及安装在底座6上的旋转吸附治具4,所述旋转吸附治具4上放置有晶圆1;且所述旋转吸附治具4上设有用于顶升吸附晶圆1的多个顶升吸附机构5。
30.其中,所述旋转吸附治具4的外侧部设有多个定位夹具2,所述旋转吸附治具4的一侧还设有修胶刀具机构3。
31.具体的,所述修胶刀具机构3包括伺服模组3-4、以及设于伺服模组3-4上的浮动刀架机构3-3,所述浮动刀架机构3-3上设有浮动刀头机构3-2,所述浮动刀头机构3-2上设有刀具3-1。
32.其中,所述定位夹具2和顶升吸附机构5均为三个,三个定位夹具2和三个顶升吸附机构5均呈圆周状等间距分布。
33.实际应用时,三个定位夹具2可呈圆周方向120度分布;其中,旋转吸附治具4用于吸附晶圆1并带动晶圆1旋转;顶升吸附机构5用于取放晶圆1;定位夹具2用于对晶圆1定位;伺服模组3-4用于驱动浮动刀架机构3-3做前后或后退动作,进而通过浮动刀头机构3-2上的刀具3-1对晶圆1周围的溢胶进行修除。
34.本实施例中,采用旋转吸附治具4真空吸附晶圆替代人工手握晶圆,使得晶圆受力更加均匀,固定更加牢固,减少由于人工用力不均匀造成晶圆的损坏,保证晶圆品质,提高成品率;采用将刀具3-1安装在浮动刀头机构3-2上,有效减弱由于晶圆周围溢胶凹凸不平使修除过程中刀具对晶圆产生的突变应力;将浮动刀架机构3-3安装在伺服模组3-4上,确保每次进刀量的一致,使晶圆受力均匀。
35.一种晶圆周围溢胶修除装置的使用方法,包括以下步骤:
36.步骤1)、上料:晶圆通过人工上料或机械手进入顶升吸附机构5顶面,顶升吸附机构5真空打开吸附住晶圆1,确保每次上料位置一致,然后,顶升吸附机构5下降,顶升吸附机构5真空断开,晶圆到达旋转吸附治具上4;
37.步骤2)、定位:定位夹具2向内动作,夹紧晶圆1,旋转吸附治具4真空打开,吸附住晶圆,定位夹具2松开,初定位完成;
38.步骤3)、初修除溢胶:旋转吸附治具4携带着晶圆作等速(可调)旋转运动,修胶刀具机构3随着伺服直线模组向晶圆方向进刀,进刀到一定位置后进行修胶动作,当晶圆随旋转吸附治具4旋转2圈(可设置),修胶刀具机构3会进给0.3mm(可设置),如此重复进刀3次(可设置),修胶刀具机构3随伺服模组退出至原始位,旋转吸附治具4停止旋转,初修溢胶完成;
39.步骤4)、重复定位:重复步骤2),进行晶圆精定位操作;
40.步骤5)、精修除溢胶:重复步骤3)精修过程,吸附治具旋转圈数及刀具机构进刀量可适当调整,精修溢胶完成,旋转吸附治具4真空断开,修边完成;
41.步骤6)、下料:顶升吸附机构5真空打开,吸附住晶圆1,顶起晶圆1,然后顶升吸附机构5真空断开,人工或机械手取下晶圆1,1片晶圆修除溢胶动作完成;
42.步骤7)、重复步骤1)至6)对一批次晶圆进行操作。
43.综上所述,本发明采用修胶刀具机构、旋转吸附治具、顶升吸附机构等,实现晶圆受力更加均匀,固定更加牢固,减少由于人工用力不均匀造成晶圆的损坏,有效减弱由于晶圆周围溢胶凹凸不平使修除过程中刀具对晶圆产生的突变应力,保证晶圆品质,提高成品率。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1