杆件夹持用多功能模块化机械夹爪
1.本发明涉及机械夹爪技术领域,尤其涉及一种杆件夹持用多功能模块化机械夹爪。
背景技术:
2.随着工业自动化的不断发展进步,工业机器人越来越广泛地应用于采矿、加工、焊接、清洁、军事、医疗、救援等生产生活的各个领域。智能高效的工业机器人使人们得以从繁重、枯燥、危险的工作中解脱出来,极大地提高了生产效率,减轻了工人的劳动强度,展现出巨大的优越性。因此,设计一种机械夹爪来完成一些,超负荷的人工无法完成的工作是十分有必要的。
3.现有的机械夹爪通常为钳式结构,通过两个铰接的夹持臂配合机架对杆件进行三点式的夹持,夹持臂的转动控制方式包括有丝杠、齿轮或齿条等多种结构,在对杆件进行夹持时,夹持臂会将杆件推动至机架处,实现三点式夹持,而在例如车厢或其它仅能将杆件沿其轴向抽出的场景下,往往需要调节与机械夹爪连接的机械臂的位置,使用不方便;并且在夹持后,对杆件进行轴向送料时,往往通过与机械夹爪所连接的机械臂实现,机械夹爪只能进行夹持。
技术实现要素:
4.针对现有技术中所存在的不足,本发明提供了一种杆件夹持用多功能模块化机械夹爪,其解决了现有技术中存在的机械夹爪在多种场景下使用不方便的问题。
5.根据本发明的实施例,杆件夹持用多功能模块化机械夹爪,包括匚形的机架和成对设置于机架内且成钳式结构设置的夹爪,夹爪的一端径向固定连接有不完全齿轮,且两个不完全齿轮相互啮合,机架上设置有驱动不完全齿轮转动的夹持电机,夹爪的活动端上设置有用于与杆件表面接触的滚轮;机架内还滑动设置有移动座,移动座通过驱动件驱动移动,且移动座的移动路径与夹爪所在的平面平行,移动座上可转动的设置有摩擦轮,摩擦轮的轴线与滚轮的轴线不处于同一平面。
6.优选的,所述夹爪包括夹爪臂和铰接臂,夹爪臂和铰接臂的端部相互铰接,夹爪臂的活动端与所述不完全齿轮连接,所述不完全齿轮成弧形,且所述不完全齿轮的两端分别连接于夹爪臂的相对侧壁上;夹爪臂与铰接臂之间设置有拉簧,拉簧的两端分别连接于夹爪臂和铰接臂上。
7.优选的,所述铰接臂上滑动设置有连接架,所述拉簧的一端连接于连接架上,连接架可通过螺栓锁定与所述铰接臂上。
8.优选的,所述驱动件包括设置于所述移动座上的齿条、设置于所述机架内的安装框、设置于安装框上的位移电机以及连接于位移电机的减速机的输出轴上的移动齿轮,移动齿轮与齿条啮合。
9.优选的,所述摩擦轮外周面的中部设置有轴向截面成弧形的环形槽,所述摩擦轮
的转轴与所述铰接臂平行设置,所述摩擦轮和滚轮均采用橡胶轮。
10.优选的,所述移动座上设置有旋转电机,旋转电机的减速机的输出轴与所述摩擦轮的一端同轴固定连接。
11.优选的,所述夹持电机、位移电机和旋转电机所配备的减速机均为在电机断电后具有自锁能力的涡轮蜗杆减速机。
12.相比于现有技术,本发明具有如下有益效果:1、通过夹持电机驱动一个不完全齿轮转动,通过相互啮合的不完全齿轮实现两个夹爪之间的相对转动,进而对位于两个夹爪之间的杆件进行夹持,同时,通过驱动件驱动移动座移动,并带动摩擦轮朝向杆件移动,通过摩擦轮配合两个夹爪实现对杆件的三点式的稳定夹持。
13.2、在进行对杆件的夹持时,与杆件接触的分别为两个滚轮和一个摩擦轮,且摩擦轮可转动,这样,及时在杆件被夹持紧固后,依旧可以通过驱动摩擦轮或滚轮转动来实现杆件沿自身轴向移动,提高了杆件的搬运效率。
14.3、在杆件被夹持时可被驱动移动的情况下,对于大尺寸的杆件,机械夹爪所需配备的机械臂的长度要求降低,如在将杆件从车厢或其它仅可夹持端部的位置进行搬运时,在前期仅能对杆件的端部进行夹持的情况下,通过驱动杆件沿其轴向移动,实现最终对杆件中部或其它部位的夹持,降低了机械夹爪搬运杆件时协同作业的自动化设备的制造成本。
15.4、摩擦轮和滚轮的轴线不在同一平面上,这样杆件在被夹持时受到的剪切力,两侧的受力点有一定的间距,只需要杆件的重心位于摩擦轮和滚轮之间,便能够保证杆件两侧的力的平衡,这样,通过机械夹爪对杆件进行夹持后,搬运杆件更稳定。
附图说明
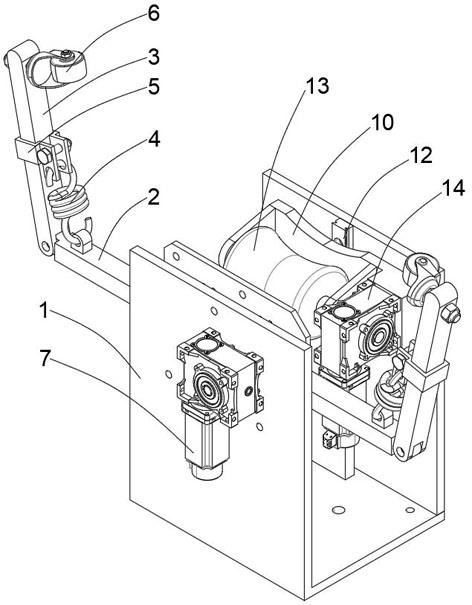
16.图1为本发明实施例的结构示意图。
17.图2为本发明实施例另一方向的结构示意图。
18.图3为本发明实施例的主视图。
19.图4为本发明实施例的俯视图。
20.图5为本发明实施例的侧视图。
21.图6为图5中a-a截面的剖视图。
22.上述附图中:1、机架;2、夹爪臂;3、铰接臂;4、拉簧;5、连接架;6、滚轮;7、夹持电机;8、不完全齿轮;9、连接板;10、移动座;11、位移电机;12、导轨;13、摩擦轮;14、旋转电机;15、位移齿轮;16、齿条;17、安装框。
具体实施方式
23.下面结合附图及实施例对本发明中的技术方案进一步说明。
24.如图1-6所示,为提高对杆件的夹持稳定性以及在对杆件夹持的过程中实现对夹持位置的调整。本发明提出杆件夹持用多功能模块化机械夹爪,包括匚形的机架1和成对设置于机架1内且成钳式结构设置的夹爪,夹爪的一端径向固定连接有不完全齿轮8,且两个不完全齿轮8相互啮合,机架1上设置有驱动不完全齿轮8转动的夹持电机7,夹爪的活动端
上设置有用于与杆件表面接触的滚轮6;机架1内还滑动设置有移动座10,移动座10通过驱动件驱动移动,且移动座10的移动路径与夹爪所在的平面平行,移动座10上可转动的设置有摩擦轮13,摩擦轮13的轴线与滚轮6的轴线处于同一平面。
25.在机架1内安装有连接板9,两个夹爪的端部连同两个不完全齿轮8可转动的设置于连接板9和机架1的内顶壁之间,通过启动夹持电机7,夹持电机7的输出轴与所配置的减速机的输入端同轴固定连接,通过减速机的输出轴带动一个不完全齿轮8转动,进而通过两个相互啮合的不完全齿轮8的实现两个夹爪之间的相对转动,两个夹爪对位于其中间的杆件进行夹持。
26.在对杆件进行夹持时,还需要启动驱动件,驱动件控制移动座10移动,机架1的内底面安装有导轨12,导轨12上滑动设置有滑块,移动座10安装于滑块上,驱动件推动移动座10沿导轨12滑动,在夹爪对杆件进行夹持的同时,移动座10上的摩擦轮13也与杆件接触,两个夹爪镜像对称设置,而镜像面穿过摩擦轮13的中部,这样使得杆件在被夹爪上的滚轮6和摩擦轮13夹持时,受力更均匀。
27.摩擦轮13和滚轮6均能够滚动,且摩擦轮13和滚轮6的轴线均垂直于被夹持杆件的轴线,这样在夹持时可通过增加摩擦力保证杆件被紧固的夹持,在需要调整夹持位置时,将杆件水平支撑时,可通过驱动摩擦轮13、或滚轮6或杆件,实现杆件被夹持位置的调整。
28.如图1-4所示,为实现对铰接臂3的固定。所述夹爪包括夹爪臂2和铰接臂3,夹爪臂2和铰接臂3的端部相互铰接,夹爪臂2的活动端与所述不完全齿轮8连接,所述不完全齿轮8成弧形,且所述不完全齿轮8的两端分别连接于夹爪臂2的相对侧壁上;夹爪臂2与铰接臂3之间设置有拉簧4,拉簧4的两端分别连接于夹爪臂2和铰接臂3上。
29.通过拉簧4对铰接臂3进行限位,保证铰接臂3能够对杆件进行夹紧,同样的,在杆件被夹紧的情况下,拉簧4使得铰接杆3具有一定的弹性,能够对被夹杆件起到一定的保护作用,避免杆件发生变形。
30.如图1-4所示,为便于调节夹爪对杆件夹持的松紧程度。所述铰接臂3上滑动设置有连接架5,所述拉簧4的一端连接于连接架5上,连接架5可通过螺栓锁定与所述铰接臂3上。在对拉簧4的粗细进行选择时,通过移动连接架5,还能够对拉簧4的长度进行选择,便于通过选择拉簧4,找到适合杆件被稳定夹持所需的夹持力。
31.如图5所示,为实现驱动件驱动移动座10移动。所述驱动件包括设置于所述移动座10上的齿条16、设置于所述机架1内的安装框17、设置于安装框17上的位移电机11以及连接于位移电机11的减速机的输出轴上的移动齿轮15,移动齿轮15与齿条16啮合。
32.在移动座10的一端设置有横截面为“l”形的连接端,齿条16通过螺栓固定在连接端的竖直段的侧壁上,通过位移电机11驱动移动齿轮15转动,移动齿轮15推动与其啮合的齿条16移动,进而使得移动座10沿导轨12滑动,最终将摩擦轮13推动至与杆件贴合,实现对杆件的夹持。
33.如图3所示,为实现摩擦轮13与杆件表面的充分接触。所述摩擦轮13外周面的中部设置有轴向截面成弧形的环形槽,所述摩擦轮13的转轴与所述铰接臂3平行设置,所述摩擦轮13和滚轮6均采用橡胶轮。对于柱状的杆件进行夹持时,摩擦轮13的环形槽能够与被夹持的杆件的外周面充分的贴合,通过增加接触面积,提高摩擦力的方式,提高杆件被夹持的稳定性。同时,橡胶材质的滚轮6和摩擦轮13不易打滑,通过摩擦轮13更简单的调节杆件被夹
持的位置。
34.如图5-6所示,为实现对被夹持杆件的被夹持位置的调节。所述移动座10上设置有旋转电机14,旋转电机14的减速机的输出轴与所述摩擦轮13的一端同轴固定连接。通过旋转电机14带动与其配套的减速机转动,使得摩擦轮13转动,进而通过摩擦轮13与杆件之间的摩擦力,实现杆件沿其轴向移动,对杆件被夹持的位置进行调节。
35.作为本发明优选的实施方法,在完成对杆件的稳定夹持后,需要对电机断电,但仍需要保持对杆件的夹持。所述夹持电机7、位移电机11和旋转电机14所配备的减速机均为在电机断电后具有自锁能力的涡轮蜗杆减速机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1