一种吊轨式巡检机器人的制作方法
1.本技术涉及巡检机器人的技术领域,尤其是涉及一种吊轨式巡检机器人。
背景技术:
2.随着人工智能技术的发展,巡检机器人在高强度、高精度、高危险的巡检环境下具有天然优势,随着科学技术的进步,巡检机器人的工作领域不断扩大,工作方式也在不断改进。
3.如公告号为cn113890139a的中国发明专利公开了一种吊轨式巡检机器人的充电结构以及吊轨式巡检机器人,充电结构包括第一充电模块、第二充电模块,第一充电模块和第二充电模块分别设置于主动轮相对的两侧,并和吊轨式巡检机器人的外壳连接,两者之间设置有间隔,第一充电模块和第二充电模块平行于管廊轨道,两者配合设置,构成充电结构的正负极。
4.针对上述相关技术,发明人认为:对于不断移动的吊轨机器人,通常利用电刷和滑触线对机器人进行充电,但是滑触线暴露在空气中,导致滑触线的凹槽内容易附着灰尘,长时间累积后,灰尘对导向块与滑触线之间的接触形成阻碍,导致接电不良。
技术实现要素:
5.为了改善滑触线的表面容易累积灰尘的问题,本技术提供一种吊轨式巡检机器人。
6.本技术提供的一种吊轨式巡检机器人采用如下的技术方案:一种吊轨式巡检机器人,包括吊轨、移动座及固定于所述移动座下方的机器人本体,所述移动座的两侧均设置有两个移动轮,所述移动座上设置有用于驱动所述移动轮沿所述吊轨长度方向往复移动的驱动组件;所述吊轨的上方设置有滑触线,所述移动座上安装有用于与所述滑触线电接触的电刷,所述移动座上靠近所述电刷的一侧设置有风扇。
7.通过采用上述技术方案,驱动组件带动移动轮移动,移动轮带动移动座及机器人本体沿吊轨的长度方向往复移动,以便于机器人对周边环境进行巡检,移动座移动过程中,电刷与滑触线相接触,且风扇对滑触线进行吹风,从而将滑触线凹槽内的灰尘吹落,使得电刷与滑触线良好接触,以保证正常供电,同时提高电刷的使用寿命。
8.优选的,所述移动座包括移动板,所述移动板靠近所述滑触线的侧面开设有让位槽,所述让位槽内转动安装有相互啮合的齿轮一及齿轮二,所述风扇的底部与所述齿轮一的顶面固定连接,所述移动板的侧面开设有与所述让位槽相连通的控制槽,所述移动板通过所述控制槽沿自身长度方向滑移安装有控制杆,所述控制杆包括与所述齿轮二相互啮合的齿条,所述齿条一的两端均固定有控制块,所述吊轨的两端均固定有用于与所述控制块相抵接的固定板。
9.通过采用上述技术方案,当移动板移动朝向吊轨的一端移动时,风扇朝向电刷靠近该端部的方向设置,当移动板移动至该端部附近时,控制块与固定板相抵接,控制块朝向
靠近电刷的方向移动,控制块带动齿条与齿轮二相互啮合,齿轮二带动齿轮一转动,齿轮一带动风扇转动,风扇朝向电刷远离该端部的方向设置,从而使风扇对滑触线位于电刷前进方向的部分进行除尘。
10.优选的,所述移动板的两侧分别开设有限位槽,所述移动板通过所述限位槽沿自身长度方向滑移安装有限位块,所述限位块可与所述固定板相抵接,所述限位槽的侧面开设有与所述控制槽相连通的定位槽,所述移动板通过所述定位槽沿自身宽度方向滑移安装有定位块,所述控制块远离所述滑触线的侧面开设有用于插设所述定位块的连接槽,所述定位块的侧面开设有用于插设所述限位块的定位通槽,所述定位通槽远离所述控制块的侧面设置有斜面一,所述限位块靠近所述定位块的侧面设置有用于与所述斜面一相抵接的斜面二。
11.通过采用上述技术方案,当移动板朝向吊轨的一端移动时,靠近该端部的定位块插设在相邻控制块的连接槽内,使控制杆不易在外力作用下发生移动,当移动板移动至该端部附近时,限位块先与固定板相抵接,限位块朝向靠近电刷的方向移动,限位块通过斜面一与斜面二相抵接以推动定位块朝向远离控制块的方向移动,定位块脱离连接槽,控制杆失去限位,继而控制杆与固定板相抵接并移动,风扇的送风方向改变。
12.优选的,所述定位块远离所述控制块的侧面固定有弹簧一,所述弹簧一远离所述定位块的一端通过所述定位槽与所述移动板固定连接;所述限位块的两侧均固定有导向块,所述限位槽的两侧均开设有导向槽,所述导向块通过所述导向槽沿所述移动板的长度方向与所述移动板滑移连接,所述导向块靠近所述定位块的侧面固定有弹簧二,所述弹簧二远离所述导向块的一端通过所述导向槽与所述移动板固定连接。
13.通过采用上述技术方案,当移动板移动至吊轨一端附近时,靠近该端部的定位块脱离连接槽,控制杆朝向靠近电刷的方向移动,风扇的送风方向改变,远离该端部的定位块在弹簧一的弹力作用下朝向靠近控制杆的方向移动,并插设在相邻控制块的连接槽内,从而对控制杆进行限位,使风扇的方向固定。
14.优选的,所述驱动组件包括两根转动安装于所述移动座上的同步轴,所述同步轴的外周面套设固定有涡轮及两个齿轮三,所述移动轮内穿设固定有转动轴,所述转动轴的外周面套设固定有与所述齿轮三相互啮合的齿轮四,所述移动座上转动安装有与所述涡轮相啮合的蜗杆。
15.通过采用上述技术方案,蜗杆转动,蜗杆带动两个涡轮同步转动,涡轮通过同步轴带动两个齿轮三同步转动,齿轮三带动齿轮四转动,齿轮四通过转动轴带动移动轮转动,从而带动移动座及机器人本体沿吊轨的长度方向移动。
16.优选的,所述移动座上转动安装有驱动轴,所述驱动轴的外周面套设有驱动套筒,所述驱动轴的外周面固定有限位条,所述驱动套筒的内周面开设有用于插设所述限位条的条形槽,所述蜗杆的外周面套设固定有锥齿轮一,所述驱动套筒的外周面套设固定有相对设置的锥齿轮二及锥齿轮三,所述锥齿轮二和所述锥齿轮三可分别与所述锥齿轮一相互啮合,所述移动座上固定有电机,所述电机的输出轴与所述驱动轴的一端固定连接,所述移动座上设置有用于驱动所述驱动轴沿自身轴向移动的换向组件。
17.通过采用上述技术方案,启动电机,电机带动驱动轴转动,驱动轴通过限位条和条形槽带动驱动套筒同步转动,驱动套筒带动锥齿轮二和锥齿轮三同步转动,当锥齿轮二与
锥齿轮一相啮合时,锥齿轮三与锥齿轮一分离,移动座朝向导轨一端移动;换向组件可推动驱动轴朝向靠近锥齿轮二的方向移动,使锥齿轮二与锥齿轮一分离,锥齿轮三与锥齿轮一相啮合,从而使移动座朝向导轨另一端移动。
18.优选的,所述换向组件包括转动安装于所述驱动套筒远离所述电机一端的驱动块,所述驱动块的外周面固定有复位块,所述复位块沿所述移动板的长度方向与所述移动板滑移连接,所述复位块远离所述电机的侧面固定有压簧一,所述压簧一远离所述复位块的一端与所述移动座固定连接,所述移动座上固定有电磁铁,所述驱动块远离所述电机的侧面固定有可与所述电磁铁相吸合的磁块一。
19.通过采用上述技术方案,电磁铁未通电时,驱动块在压簧一的弹力作用下朝向靠近电机的方向移动,驱动块带动驱动套筒朝向靠近电机的方向移动,从而使锥齿轮二与锥齿轮一相啮合;电磁铁通电后,电磁铁对磁块一的吸力作用大于压簧一对驱动块的弹力作用,驱动块带动驱动套筒朝向远离电机的方向移动,从而使锥齿轮二与锥齿轮一分离,锥齿轮三与锥齿轮一相啮合。
20.优选的,其中一个所述控制块的侧面固定有动片,所述控制槽的侧面开设有滑槽,所述动片通过所述滑槽沿所述移动板的长度方向与所述移动板滑移连接,所述滑槽远离所述控制块的侧面嵌设固定有可与所述动片电接触的定片,所述定片与所述电磁铁电连接,所述移动座上固定有蓄电池,所述动片与所述蓄电池电连接。
21.通过采用上述技术方案,当移动板朝向吊轨一端移动时,动片与定片处于分离状态,电磁铁未通电;当移动板移动至该端部附近时,控制块与固定板抵接后发生移动,控制块带动动片移动,动片与定片电接触,电磁铁通电启动,驱动块带动驱动套筒朝向远离电机的方向移动,锥齿轮二与锥齿轮一分离,锥齿轮三与锥齿轮一相啮合,移动轮的转动方向发生改变,移动板朝向吊轨另一端移动,从而实现机器人本体的往复移动。
22.综上所述,本技术包括以下至少一种有益技术效果:1.驱动组件带动移动轮移动,移动轮带动移动座及机器人本体沿吊轨的长度方向往复移动,以便于机器人对周边环境进行巡检,移动座移动过程中,电刷与滑触线相接触,且风扇对滑触线进行吹风,从而将滑触线凹槽内的灰尘吹落,使得电刷与滑触线良好接触,以保证正常供电,同时提高电刷的使用寿命;2.当移动板朝向吊轨的一端移动时,靠近该端部的定位块插设在相邻控制块的连接槽内,使控制杆不易在外力作用下发生移动,当移动板移动至该端部附近时,限位块先与固定板相抵接,限位块朝向靠近电刷的方向移动,限位块通过斜面一与斜面二相抵接以推动定位块朝向远离控制块的方向移动,定位块脱离连接槽,控制杆失去限位,继而控制杆与固定板相抵接并移动,风扇的送风方向改变;3.当移动板朝向吊轨一端移动时,动片与定片处于分离状态,电磁铁未通电;当移动板移动至该端部附近时,控制块与固定板抵接后发生移动,控制块带动动片移动,动片与定片电接触,电磁铁通电启动,驱动块带动驱动套筒朝向远离电机的方向移动,锥齿轮二与锥齿轮一分离,锥齿轮三与锥齿轮一相啮合,移动轮的转动方向发生改变,移动板朝向吊轨另一端移动,从而实现机器人本体的往复移动。
附图说明
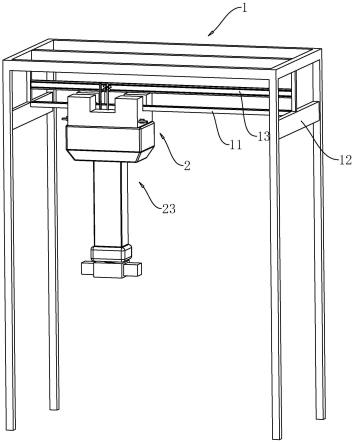
23.图1是本技术实施例的整体结构示意图。
24.图2是本技术实施例中移动座的结构示意图。
25.图3是本技术实施例中移动板的剖视图。
26.图4是本技术实施例中驱动套筒的剖视图。
27.图5是图3中a处的放大示意图。
28.图6是本技术实施例中限位块和定位块的爆炸示意图。
29.附图标记:1、安装架;11、吊轨;12、固定板;13、滑触线;14、电刷;2、移动座;21、移动板;22、移动块;23、机器人本体;24、转动轴;25、移动轮;26、同步轴;27、齿轮三;28、齿轮四;3、蜗杆;31、涡轮;32、驱动轴;33、驱动套筒;34、锥齿轮一;35、锥齿轮二;36、锥齿轮三;37、限位条;38、条形槽;39、电机;4、驱动块;41、驱动槽;42、复位块;43、复位槽;44、压簧一;45、磁块;46、电磁铁;5、控制杆;51、控制槽;52、让位槽;53、齿轮一;54、齿轮二;55、风扇;56、控制块;57、齿条;6、限位块;61、限位槽;62、导向块;63、导向槽;64、弹簧二;65、斜面二;7、定位块;71、定位槽;72、弹簧一;73、连接槽;74、定位通槽;75、斜面一;8、动片;81、定片;82、滑槽;83、蓄电池。
具体实施方式
30.以下结合附图1-6对本技术作进一步详细说明。
31.本技术实施例公开一种吊轨式巡检机器人。参照图1和图2,吊轨11式巡检机器人包括安装架1、固定于安装架1上的吊轨11及沿吊轨11长度方向移动的移动座2,吊轨11的两端分别固定有固定板12。移动座2包括位于吊轨11下方的移动板21及固定于移动板21顶面的四个移动块22,移动板21的底面固定有机器人本体23。
32.参照图2,移动块22内转动安装有转动轴24,转动轴24的外周面套设固定有移动轮25,移动轮25的外周面与吊轨11的顶面相贴合,移动轮25可沿吊轨11的长度方向移动。移动板21内转动安装有两根同步轴26,同步轴26的外周面套设固定有涡轮31及两个齿轮三27,转动轴24的外周面套设固定有与齿轮三27相互啮合的齿轮四28。移动板21内转动安装有蜗杆3,蜗杆3与两个涡轮31均相互啮合。
33.蜗杆3转动,蜗杆3带动两个涡轮31同步转动,涡轮31带动同步轴26转动,同步轴26通过齿轮三27和齿轮四28相互啮合以带动转动轴24转动,转动轴24带动移动轮25转动。移动轮25沿着吊轨11滚动,从而带动机器人本体23沿吊轨11的长度方向移动。
34.参照图3和图4,移动板21内转动安装有驱动轴32,驱动轴32与蜗杆3相互垂直设置。移动板21的侧面固定有电机39,电机39的输出轴与驱动轴32的一端固定连接。驱动轴32的外周面套设有驱动套筒33,驱动轴32的外周面固定有两个对称设置的限位条37,驱动套筒33的内周面开设有用于插设限位条37的条形槽38,限位条37通过条形槽38沿驱动套筒33的长度方向与驱动套筒33滑移连接。蜗杆3的外周面套设固定有锥齿轮一34,驱动套筒33的外周面套设固定有锥齿轮二35和锥齿轮三36,锥齿轮二35和锥齿轮三36相对设置。锥齿轮二35位于锥齿轮三36远离电机39一侧,锥齿轮二35和锥齿轮三36可分别与锥齿轮一34相互啮合。
35.参照图4和图5,移动板21内设置有驱动槽41,移动板21通过驱动槽41沿自身长度
方向滑移安装有驱动块4,驱动块4靠近电机39的侧面与驱动套筒33转动连接。驱动块4的外周面固定有两个对称设置的复位块42,驱动槽41的内周面开设有用于插设复位块42的复位槽43,复位块42通过复位槽43沿移动板21的长度方向与移动板21滑移连接。复位块42远离电机39的侧面固定有压簧一44,压簧一44远离电机39的一端与复位槽43远离电机39的侧面固定连接。驱动槽41远离电机39的侧面嵌设固定有电磁铁46,驱动块4远离电机39的侧面固定有可与电磁铁46相吸合的磁块45。
36.启动电机39,电机39带动驱动轴32转动,驱动轴32通过限位条37和条形槽38带动驱动套筒33转动,驱动套筒33带动锥齿轮二35和锥齿轮三36转动。电磁铁46未通电时,驱动块4在压簧一44的弹力作用下朝向靠近电机39的方向移动,锥齿轮二35与锥齿轮一34相互啮合,锥齿轮三36与锥齿轮一34分离,锥齿轮二35带动锥齿轮一34转动,锥齿轮一34带动蜗杆3转动,蜗杆3带动移动轮25朝向吊轨11一侧移动;电磁铁46通电时,电磁铁46对磁块45的吸力大于压簧一44对驱动块4的弹力,驱动套筒33朝向远离电机39的方向移动,锥齿轮二35与锥齿轮一34分离,锥齿轮三36与锥齿轮一34相啮合,锥齿轮三36带动锥齿轮一34转动,锥齿轮一34带动蜗杆3反向转动,蜗杆3带动移动轮25朝向吊轨11另一侧移动。
37.参照图1和图3,吊轨11的上方设置有滑触线13,移动板21靠近滑触线13的侧面安装有用于与滑触线13电接触的电刷14。电刷14插设在滑触线13的凹槽内,电刷14与滑触线13电接触,从而对移动座2及机器人本体23进行供电。移动板21靠近滑触线13的侧面开设有让位槽52,让位槽52内转动安装有相互啮合的齿轮一53及齿轮二54。齿轮一53的顶面固定有风扇55,风扇55朝向滑触线13的凹槽吹风,从而对滑触线13凹槽内的灰尘进行清理。
38.参照图1、图3及图5,移动板21的侧面开设有与让位槽52相连通的控制槽51,移动板21通过控制槽51沿自身长度方向滑移安装有控制杆5。控制杆5包括与齿轮二54相互啮合的齿条57,齿条57的两端分别固定有控制块56,控制块56可与相邻的固定板12相抵接。其中一个控制块56的侧面固定有动片8,控制槽51的侧面开设有滑槽82,动片8通过滑槽82沿移动板21的长度方向与移动板21滑移连接。滑槽82远离控制块56的侧面嵌设固定有可与动片8电接触的定片81,定片81与电磁铁46电连接。移动板21上固定有蓄电池83,动片8与蓄电池83电连接。
39.移动座2带动移动板21朝向吊轨11的一端移动,风扇55朝向电刷14靠近该端部的方向设置,以便于风扇55对滑触线13位于电刷14前进方向的部分进行除尘;移动座2移动至该端部附近时,控制杆5与该端部的固定板12相抵接,控制块56相对于移动板21朝向靠近电刷14的方向移动,齿条57推动齿轮二54转动,齿轮二54带动齿轮一53转动,齿轮一53带动风扇55转动,风扇55朝向远离该端部的方向转动,使得风扇55朝向电刷14远离该端部的一侧吹风,使得风扇55始终朝向滑触线13位于电刷14千斤方向的部分设置。控制杆5移动过程中带动动片8朝向靠近电刷14的方向移动,动片8与定片81电接触,电磁铁46通电导通,蜗杆3反向转动,使得移动轮25反向转动,移动座2朝向吊轨11的另一端移动。
40.参照图3和图5,移动板21的两侧分别开设有限位槽61,移动板21通过限位槽61沿自身长度方向滑移安装有限位块6,限位块6可与固定板12相抵接。限位块6的两侧均固定有导向块62,限位槽61的相对内侧均开设有导向槽63,导向块62通过导向槽63沿移动板21的长度方向与移动板21滑移连接。导向块62靠近齿条57的侧面固定有弹簧二64,弹簧二64远离导向块62的一端与导向槽63靠近齿条57的内侧面固定连接。
41.参照图5和图6,限位槽61的侧面开设有与控制槽51相连通的定位槽71,移动板21通过定位槽71沿自身宽度方向滑移安装有定位块7,控制块56远离滑触线13的侧面开设有用于插设定位块7的连接槽73。定位块7远离控制块56的侧面固定有弹簧一72,弹簧一72远离定位块7的一端与定位槽71远离控制块56的内侧面固定连接。定位块7靠近限位块6的侧面开设有用于插设限位块6的定位通槽74,定位通槽74远离控制块56的侧面设置有斜面一75,限位块6靠近定位块7的侧面设置有用于与斜面一75相抵接的斜面二65。
42.当移动板21朝向吊轨11的一端移动时,靠近该端部的定位块7在弹簧一72的弹力作用下朝向靠近控制杆5的方向移动,定位块7插设在相邻控制块56的连接槽73内,远离该端部的定位块7与相邻控制块56的侧面相抵接;当移动板21移动至该端部附近时,限位块6先与固定板12相抵接,限位块6朝向靠近定位块7的方向移动,限位块6通过斜面一75和斜面二65相抵接,推动定位块7朝向远离控制块56的方向移动,定位块7脱离连接槽73,控制杆5失去限位;进而控制杆5与固定板12相抵接,齿条57和控制块56发生移动,风扇55换向,远离该端部的定位块7在弹簧一72的弹力作用下插设在相邻控制块56的连接槽73内,从而对控制杆5进行限位。
43.本技术实施例一种吊轨11式巡检机器人的实施原理为:启动电机39,电机39带动驱动轴32转动,驱动轴32带动驱动套筒33转动,驱动套筒33带动锥齿轮二35转动,锥齿轮二35带动锥齿轮一34转动,锥齿轮一34带动蜗杆3转动,蜗杆3带动两个涡轮31同步转动,涡轮31通过同步轴26带动四个齿轮三27同步转动,齿轮三27通过齿轮四28带动四个移动轮25同步转动,使得移动轮25沿着导轨的长度方向移动;移动轮25移动至吊轨11的一端附近时,靠近该端部的限位块6与固定板12相抵接,限位块6通过斜面一75和斜面二65相抵接以推动定位块7脱离连接槽73,控制杆5失去限位,控制杆5与固定板12相抵接,齿条57发生移动,齿条57带动齿轮二54转动,齿轮二54带动齿轮一53转动,齿轮一53带动风扇55转动,风扇55的吹风方箱转动至电刷14的另一侧;控制块56移动,动片8与定片81电接触,电磁铁46通电,锥齿轮二35与锥齿轮一34分离,锥齿轮三36与锥齿轮一34相啮合,移动轮25的转动方向改变,移动轮25带动移动座2朝向吊轨11另一端移动。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1