一种未知环境下移动机器人自主排爆系统及方法与流程
1.本发明属于未爆弹排爆领域,尤其涉及一种未知环境下移动机器人自主排爆系统及方法。
背景技术:
2.未知环境下机器人排爆技术是指利用机器人进入一片未知区域,通过自身所搭载的激光雷达来获取数据,通过slam(simultaneous localization and mapping)算法构建环境地图,利用路径规划算法来为机器人规划运动路径以及实时避障,同时使用摄像头来对环境进行识别,判断是否存在未爆弹,从而可以确定未爆弹的位置及姿态,方便后期对未爆弹进行排除。
3.目前,排除未爆弹的方法还是派爆破员前往进行排爆作业或者使用遥控机器人进行排爆,其存在的缺点在于:1)排爆是高危险作业,一旦出现意外,就可能对爆破员的生命造成威胁;2)使用遥控机器人,不但遥控距离有限,而且对操作员的遥控技术要求较高,消耗人力,物力成本高。
4.因此,利用机器人在未知区域自主的寻找未爆弹并排除是必不可少的,该方法可以将大部分工作交给机器人来完成,减少人力消耗,不需要人员进入危险区域,从而能够保证人员生命安全。
5.针对以上现状,迫切需要开发一种未知环境下移动机器人自主排爆系统及方法,以克服当前实际应用中的不足。
技术实现要素:
6.本发明的目的在于提供一种未知环境下移动机器人自主排爆系统及方法,旨在解决上述背景中提到的问题。
7.本发明是这样实现的,一种未知环境下移动机器人自主排爆系统,包括远程控制终端和排爆机器人,所述远程控制终端和排爆机器人无线通信连接,所述排爆机器人包括有机械臂、摄像头、激光雷达和工控机,所述工控机用于通过slam算法获取环境的地图信息,并通过所述激光雷达扫描的已知地图边界点计算其位置信息熵,确定位置信息熵大的点为排爆机器人下一个要到达的目标点,通过利用全局路径规划算法为排爆机器人规划一条从当前位置到目标位置的全局路径,利用局部路径规划算法来进行实时避障;所述摄像头用于获取环境信息,并配合所述工控机利用目标识别算法来识别环境内是否存在未爆弹;若存在未爆弹,工控机则将未爆弹的环境信息以及位置信息返回到远程控制终端,工控机还通过机械臂将引爆装置放置到未爆弹的位置;所述远程控制终端还用于通过所述工控机远程控制引爆装置将未爆弹引爆。
8.进一步的技术方案,所述激光雷达包括有发射模块、接收模块以及信息处理模块,所述发射模块用于发射激光束探测目标的位置和速度特征;所述激光雷达采用8线、16线、32线或64线雷达。
9.进一步的技术方案,所述工控机还可拆卸电性连接有显示器和键盘,通过所述键盘用于输入指令给所述工控机,调试运行在所述工控机上的机器人操作系统,并通过所述显示器显示系统运行状况。
10.本发明的另一目的在于,一种未知环境下移动机器人自主排爆方法,包括以下步骤:
11.步骤1,根据排爆任务要求,确定危险区域,将排爆机器人放在危险区域边缘;
12.步骤2,启动排爆机器人的工控机,以及启动远程控制终端,并将排爆机器人和远程控制终端连接在同一局域网下;
13.步骤3,通过远程控制终端启动排爆机器人的搜索程序;
14.步骤4,在远程控制终端启动rviz程序实时监测排爆机器人通过激光雷达获取的地图信息,同时启动摄像头监测程序,通过摄像头实时获取环境信息;
15.步骤5,待排爆机器人搜索完未知区域,确定未爆弹位置及姿态信息;
16.步骤6、利用路径规划算法以及多目标点导航算法,每个未爆弹的位置都设置为目标点,以引导排爆机器人将引爆装置一一放到引爆位置,然后将排爆机器人退回到安全区域;
17.步骤7,通过远程控制终端远程控制引爆装置将未爆弹引爆,从而实现对未爆弹的排除。
18.进一步的技术方案,在步骤4中,排爆人员在远程控制终端能够实时的监控排爆机器人的动态以及获取到的环境与地图信息。
19.本发明提供的一种未知环境下移动机器人自主排爆系统及方法,在工作时,排爆机器人可以自主的在未知排弹区域进行搜索,以及自主获取未知环境的局部地图信息,实现边走边搜的目的;同时可以对局部环境内环境进行识别,获取未爆弹的位置以及姿态信息返回到远程控制终端;通过采用路径规划算法与全局路径规划算法相结合的方式,引导排爆机器人探索未搜索区域,并实现动态避障,保证排爆机器人自身的安全,实现无需排爆人员进入危险区域且能完成未爆弹的排除任务,从而确保了排爆人员的生命安全。
附图说明
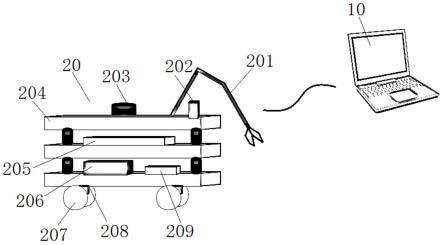
20.图1为本发明实施例提供的未知环境下移动机器人自主排爆系统的结构示意图;
21.图2为本发明实施例提供的排爆机器人进行排爆时的方法流程图。
22.图中:10-远程控制终端,20-排爆机器人,201-机械臂,202-摄像头,203-激光雷达,204-架体,205-工控机,206-电源,207-行走件,208-伺服电机,209-电机驱动器。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
24.以下结合具体实施例对本发明的具体实现进行详细描述。
25.如图1所示,为本发明一个实施例提供的一种未知环境下移动机器人自主排爆系统,包括远程控制终端10和排爆机器人20,所述远程控制终端10和排爆机器人20无线通信
连接,远程控制可采用现有公知技术实现,不作限定。
26.所述排爆机器人20包括有机械臂201、摄像头202、激光雷达203、架体204、工控机205、电源206、行走件207、伺服电机208和电机驱动器209,所述架体204的底部安装有行走件207以及用于对行走件207进行驱动转动的伺服电机208,所述架体204的顶部分别安装有机械臂201、摄像头202和激光雷达203,所述架体204的内侧分别安装有工控机205、电源206和电机驱动器209。
27.进一步的,所述架体204可以选用多层结构,架体204的规格大小以及材料可视情况确定,整个排爆机器人20外壳的材料也可视情况确定,在此不作限定。
28.进一步的,所述行走件207采用轮子或环形履带,即排爆机器人20的运动可视情况采用履带式或轮式,在此不作限定;采用轮子则应用于路况相对平滑的环境;采用环形履带则应用于路况较复杂,带有坑洼路况的环境。
29.进一步的,所述电源206和工控机205电性连接,电源206用于对机械臂201、摄像头202、激光雷达203、工控机205、伺服电机208和电机驱动器209进行供电;电源206的形状可以为立方体,优选安装在架体204的底盘上,作用是为排爆机器人20搭载的所有用电设备供电,保证排爆机器人20能够持续运行。
30.进一步的,所述电机驱动器209分别与工控机205和伺服电机208电性连接,电机驱动器209用于对所述伺服电机208进行工作控制,执行所述工控机205发送的运动指令,保证排爆机器人20按照规划的方式运动;所述伺服电机208是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置,一般需要四个相同规格的伺服电机208来带动轮子或者环形履带,实现四驱运动,具体安装驱动方式不作限定,采用现有公开技术即可。
31.进一步的,所述激光雷达203与工控机205电性连接,激光雷达203用于获取未知区域的局部地图,所述激光雷达203包括有发射模块、接收模块以及信息处理模块三部分,是通过自身高速旋转,发射激光束探测目标的位置、速度等特征量的雷达部件,目的是用来实时获取地图、障碍物等环境信息;根据执行任务复杂程度,可以选取不同类型以及精密度的激光雷达203,如8线、16线、32线以及64线雷达。
32.进一步的,所述摄像头202与工控机205电性连接,摄像头202可采用usb数据线与工控机205电性连接,摄像头202用于获取环境信息,同时利用现有技术中公开的图像识别算法对环境信息进行图像识别,判断是否存在未爆弹;若存在,则将未爆弹的环境信息以及位置信息返回到远程控制终端10。另外,摄像头202的规格可根据需要任意选择,其目的是将获取的实景信息传输给工控机205,在工控机205内进行识别处理,判断是否存在未爆弹。
33.进一步的,所述工控机205还与机械臂201电性连接以及与所述远程控制终端10无线通信连接,工控机205用于对所述机械臂201、摄像头202、激光雷达203和电机驱动器209进行工作控制。另外,工控机205其外观为立方体的一台计算机,工控机205外部除了连接上述部件外,还可连接显示器、电脑键盘等,同时可以扩展其它传感器等;显示器为工控机205的输出设备,是用于调试运行在工控机205上的机器人操作系统(robot operating system,ros),显示系统运行状况;键盘为计算机输入设备,用来给工控机205输入指令。
34.所述工控机205采用slam(同时定位与建图)算法来获取环境的地图信息,通过对激光雷达203扫描的已知地图边界点计算其位置信息熵,确定位置信息熵大的点为排爆机器人20下一个要到达的目标点,通过利用全局路径规划算法为排爆机器人20规划一条从当
前位置到目标位置的全局路径,利用局部路径规划算法来进行实时避障;根据摄像头202获取的环境信息,所述工控机205利用目标识别算法来识别环境内是否存在未爆弹;若存在未爆弹,工控机205则将未爆弹的环境信息以及位置信息返回到远程控制终端10。
35.在本发明实施例中,将排爆机器人20放在排爆区域执行任务时,排爆机器人20通过自身携带的激光雷达203获取未知区域的局部地图,利用摄像头202获取环境信息,同时利用图像识别算法对环境信息进行图像识别,判断是否存在未爆弹;若存在未爆弹,工控机205则将未爆弹的环境信息以及位置信息返回到远程控制终端10。通过全局路径规划算法为机器人获取下一步要到达的位置,在排爆机器人20运动过程中通过局部路径规划算法进行实时避障。以此类推,排爆机器人20对整个未知区域进行搜索,确定未爆弹的位置及姿态,最后通过无人排爆技术对搜索到的未爆弹进行引爆处理,从而保证人员安全。
36.综上所述,该未知环境下移动机器人自主排爆系统,在工作时,排爆机器人20可以自主的在未知排弹区域进行搜索,以及自主获取未知环境的局部地图信息,实现边走边搜的目的;同时可以对局部环境内环境进行识别,获取未爆弹的位置以及姿态信息返回到远程控制终端10;通过采用路径规划算法与全局路径规划算法相结合的方式,引导排爆机器人20探索未搜索区域,并实现动态避障,保证排爆机器人20自身的安全,实现无需排爆人员进入危险区域且能完成未爆弹的排除任务。
37.如图1-2所示,本发明的一个实施例还提供了一种未知环境下移动机器人自主排爆方法,包括以下步骤:
38.步骤1,根据排爆任务要求,确定危险区域,将排爆机器人20放在危险区域边缘;
39.步骤2,启动排爆机器人20的工控机205,以及启动远程控制终端10,并将排爆机器人20和远程控制终端10连接在同一局域网下;
40.步骤3,通过远程控制终端10启动排爆机器人20的搜索程序;
41.步骤4,在远程控制终端10启动rviz程序实时监测排爆机器人20通过激光雷达203获取的地图信息,同时启动摄像头202监测程序,通过摄像头202实时获取环境信息;
42.步骤5,待排爆机器人20搜索完未知区域,确定未爆弹位置及姿态信息;
43.步骤6、利用路径规划算法以及多目标点导航算法,每个未爆弹的位置都设置为目标点,以引导排爆机器人20将引爆装置(可以为聚能弹)一一放到引爆位置,然后将排爆机器人20退回到安全区域;
44.步骤7,通过远程控制终端10远程控制引爆装置将未爆弹引爆,从而实现对未爆弹的排除。
45.进一步的,在步骤4中,排爆人员在远程控制终端10能够实时的监控排爆机器人20的动态以及获取到的环境与地图信息。
46.在本发明实施例中,将排爆机器人20应用于排爆领域,从启动排爆机器人20与远程控制终端10到引爆未爆弹,自始至终不需要排爆人员进入危险区域,从而确保了排爆人员的生命安全。除此之外,引爆未爆弹也不会对排爆机器人20造成任何损坏,排爆机器人20可以重复使用,节省资源。
47.此外,各部件的控制、型号及电路连接不作具体限定,在实际应用时可灵活设置。涉及到的电路、电子元器件和模块均为现有技术,本领域技术人员完全可以实现,无须赘言,本发明保护的内容也不涉及对于软件和方法的改进。
48.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
49.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1