一种用于运动模特的仿真手臂的制作方法
1.本发明涉及用于运动模特的仿真手臂技术领域,尤其涉及一种用于运动模特的仿真手臂。
背景技术:
2.目前,中国专利申请号:cn202220392210.x公开了一种服装展示模特,包括包括头部壳体、颈部壳体、躯干壳体、肩部壳体、上臂壳体、肘部壳体、前臂壳体、手部及腕部壳体和支架,其用于模拟人体外形,作为上身衣物的承载体,和连接和保护内部的机械结构;电动舵机:十六自由度衣服模特机器人壳体内部共有16个电动舵机,由头部舵机3个、左、右肩臂舵机各6个,腰部舵机1个组成,所述左、右肩臂舵机的每条肩臂的舵机由以下舵机组成:肩部舵机2个、上臂舵机1个、肘部舵机1个、前臂舵机1个、腕部舵机1个,其用于控制机器人的各部分关节的转动,使衣服模特机器人形成并保持一定的姿态,或从某种姿态以一定的路径向另一种姿态运动,同时承载静止和运动过程中产生的扭矩,公开了现有仿真机械臂,但是虽然该机械臂具有高自由度的机械结构,但是手臂运动状态时,肘部壳体坚硬,不会随着肘部运动进行相应变化仿真人体肌肉,用于运动模特的仿真手臂仿真效果差。
技术实现要素:
3.因此,针对上述的问题,本发明提出一种用于运动模特的仿真手臂,其解决了手臂运动状态时,肘部壳体坚硬,不会随着肘部运动进行相应变化仿真人体肌肉,用于运动模特的仿真手臂仿真效果差的技术问题。
4.为实现上述目的,本发明采用了以下技术方案:一种用于运动模特的仿真手臂,包括连接块、可转动地设于连接块上的驱动安装块、用于驱动旋转关节x轴方向旋转的第一驱动装置、可转动地设于驱动安装块相对连接块一侧的第一上大臂外壳、与驱动安装块铰接的第二上大臂外壳、用于驱动第一上大臂外壳和第二上大臂外壳在驱动安装块y轴方向旋转的第二驱动装置、可转动地设于第一上大臂外壳和第二上大臂外壳底部的下大臂外壳、用于驱动下大臂外壳在第一上大臂外壳z轴方向旋转的第三驱动装置、可转动地设于下大臂外壳底部的上小臂外壳、用于驱动上小臂外壳在下大臂外壳x轴方向旋转的第四驱动装置、可转动地设于上小臂外壳底部的下小臂外壳、用于驱动下小臂外壳在上小臂外壳z轴方向旋转的第五驱动装置、活动设于下小臂外壳底部的手掌外壳以及设于下小臂外壳内的手掌驱动装置,所述第二上大臂外壳与第一上大臂外壳拆卸连接,所述第二驱动装置设于第一上大臂外壳和第二上大臂外壳内,所述第三驱动外壳设于下大臂外壳内,所述第四驱动装置可拆卸地设于上大臂外壳内,所述第五驱动装置设于上小臂外壳内;所述第一上大臂外壳、第二上大臂外壳以及下大臂外壳包围拼接形成手臂骨架,所述手臂骨架顶面形状为平面,所述手臂骨架靠近上小臂外壳一侧具有下凹弧形,所述手臂骨架底部具有向上凹的凹部,所述手臂骨架左右两侧到中部逐渐向下凸起,所述手臂骨架顶部位于平面处设有第一仿真肌肉充气硅胶。
5.进一步的,所述手掌驱动装置包括设于下小臂外壳内的第一电机、可转动地设于第一电机输出轴处的第一转盘、设于第一转盘远离圆心位置处的第一凸部、可转动地设于第一转盘凸部处的第一连杆、设于下小臂外壳内且位于第一电机下方的第二电机、设于第二电机上的第二转盘、设于第二转盘远离圆心位置处的第二凸部以及可转动地设于第二凸部上的第二连杆,所述手掌外壳设有分别与第一连杆和第二连杆活动连接的活动部,所述第一转盘和第二转盘不位于同一纵轴线上。
6.进一步的,所述手掌外壳横向一侧上可转动地设有大拇指,所述第二大拇指与手掌外壳轴方向进行铰接,所述大拇指与手掌外壳连接处设有铰接块,所述铰接块与手掌外壳进行铰接,所述铰接块外侧固设有拉线,所述手掌外侧内设有用于拉线卷绕的第一收线轮,所述第一收线轮与手掌外壳连接处设有扭力弹簧,所述手掌外壳位于大拇指下方设有第二收线轮,所述手掌外壳内设有用于驱动第二收线轮旋转的轮电机。
7.进一步的,所述第一仿真肌肉充气硅胶底面与平面贴合,所述第一仿真肌肉充气硅胶中部设有向上凸起的肱凸部,所述第一仿真肌肉充气硅胶左部具有与肱凸部平滑过渡的小肱部,所述小肱部内设有多个支撑薄片,所述支撑薄片为从左到右、从小到上倾斜,位于所述小肱部中部的支撑薄片高度大于横向两侧的支撑薄片,所述支撑薄片中部均设有第一通气孔,所述小肱部与肱凸部交接处设有间隔薄片,所述间隔薄片上设有第二通孔,所述小肱部右侧设有第一封闭薄片,所述第一仿真肌肉充气硅胶位于相邻支撑薄片处设有第一连通阀,所述第一仿真肌肉充气硅胶位于间隔薄片和封闭薄片之间设有第二连通阀,所述第一连通阀和第二连通阀均与第一仿真肌肉充气硅胶相连通。
8.通过采用前述技术方案,本发明的有益效果是:
9.本用于运动模特的仿真手臂,通过第一仿真肌肉充气硅胶的设置,其中仿真手臂的小臂在大臂上旋转时,第一仿真肌肉充气硅胶可充气碰撞,仿真手臂的小臂与大臂为平行状态时,第一仿真肌肉充气硅胶放气,可仿真人体肌肉运动状态,仿真效果好,解决了手臂运动状态时,肘部壳体坚硬,不会随着肘部运动进行相应变化仿真人体肌肉,用于运动模特的仿真手臂仿真效果差的问题。
附图说明
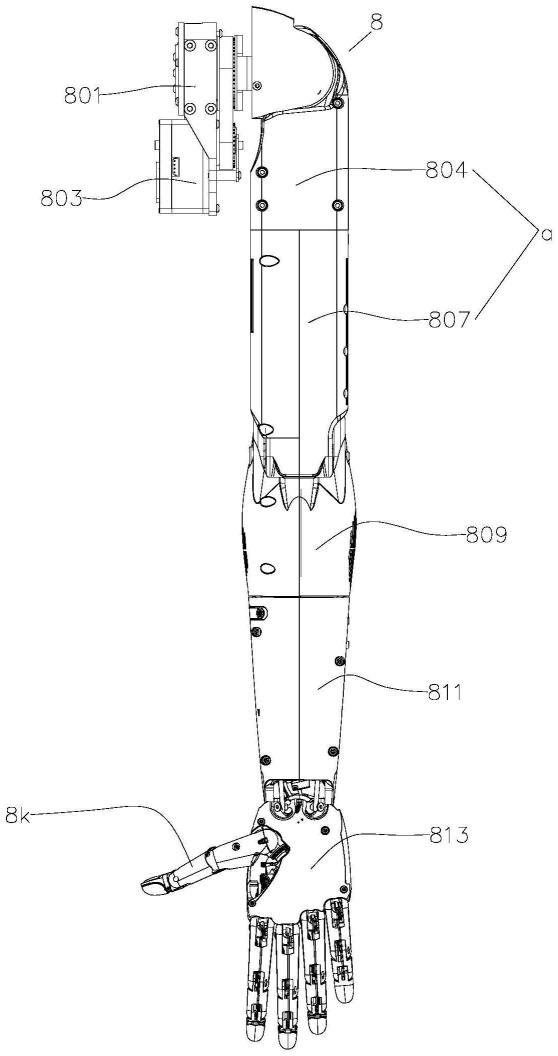
10.图1是本发明的仿真手臂结构正视示意图;
11.图2是本发明的仿真手臂爆炸状态结构示意图;
12.图3是本发明的仿真手臂局部结构示意图;
13.图4是本发明的仿真手臂局部结构正视示意图;
14.图5是本发明的仿真手臂结构正视示意图;
15.图6是本发明的仿真手臂结构剖面示意图;
16.图7是本发明的仿真手臂局部剖面结构示意图;
17.图8是本发明的仿真手臂运动前后状态对比结构示意图;
18.图9是本发明的仿真手臂与机器人使用状态结构正视示意图。
具体实施方式
19.现结合附图和具体实施方式对本发明进一步说明。
20.参考图1至图8,本实施例提供一种用于运动模特的仿真手臂,包括所述仿真手臂包括与连接环相连接的连接块801、可转动地设于连接块上的驱动安装块802、用于驱动旋转关节x轴方向旋转的第一驱动装置803、可转动地设于驱动安装块相对连接块一侧的第一上大臂外壳804、与驱动安装块铰接的第二上大臂外壳805、用于驱动第一上大臂外壳和第二上大臂外壳在驱动安装块y轴方向旋转的第二驱动装置806、可转动地设于第一上大臂外壳和第二上大臂外壳底部的下大臂外壳807、用于驱动下大臂外壳在第一上大臂外壳z轴方向旋转的第三驱动装置808、可转动地设于下大臂外壳底部的上小臂外壳809、用于驱动上小臂外壳在下大臂外壳x轴方向旋转的第四驱动装置810、可转动地设于上小臂外壳底部的下小臂外壳811、用于驱动下小臂外壳在上小臂外壳z轴方向旋转的第五驱动装置812、活动设于下小臂外壳底部的手掌外壳813以及设于下小臂外壳内的手掌驱动装置814,所述第二上大臂外壳与第一上大臂外壳拆卸连接,所述第二驱动装置806设于第一上大臂外壳和第二上大臂外壳内,所述第三驱动外壳设于下大臂外壳内,所述第四驱动装置可拆卸地设于上大臂外壳内,所述第五驱动装置设于上小臂外壳内。
21.优选地,第一上大臂外壳和第二上大臂外壳与下大臂外壳之间的第三驱动装置为锥齿轮驱动机构,上小臂外壳和下小臂之间的第五驱动装置也为锥齿轮驱动机构,锥齿轮驱动机构内置锥齿轮位于第一上大臂外壳和第二上大臂外壳之间,驱动锥齿轮的电机位于锥齿轮中部,下小臂外壳上也有一个锥齿轮,驱动锤齿轮旋转的电机位于为齿轮中部,该结构位于仿真手臂中部,仿真手臂摆动过程中配重更均匀,集中在仿真手臂中线位置上,方便仿真手臂摆动,并且都集中在中线上,相比位于横向一侧的驱动机构,不会显得很突兀,尤其是应用于展示模特使用时,对美观性要求高,同时该活动轴更多,更灵活,该结构相比第一驱动装置传动机构占用空间更小,在小臂和大臂之间过渡曲线更自然。
22.仿真手臂的设置,在初始状态下,手掌外壳贴合在盆体外壳横向一侧,将各个驱动装置与外部控制中心相连接后,第一驱动装置带动驱动安装块向上旋转90度,完成后第四驱动装置下大臂外壳在上小臂外壳位置向上旋转90度,第二驱动装置再驱动第一上手臂外壳和第二上手臂外壳向横向一侧旋转45度~60度,第五驱动装置将下小臂外壳旋转,直至下手臂外壳顶部的手掌外壳与外部展示橱窗玻璃到水平位置停下,然后第三驱动装置带动下大臂外壳在第一上手臂外壳向前旋转至倾斜角度,然后手掌驱动装置再驱动手掌外壳前后调整,将手掌外壳与地面保持垂直位置,然后第四驱动装置将驱动下大臂外壳在上小臂外壳位置之间往复旋转10~35度之间,仿真手臂将呈现真实的招手姿势,仿真手臂自由度高,相比传统三轴或四轴机械手自由度更高,展示模特使用时,招手弧度和曲线与人体手臂招手曲线更一致,仿真性好。
23.所述手掌驱动装置包括设于下小臂外壳内的第一电机8a、可转动地设于第一电机输出轴处的第一转盘8b、设于第一转盘远离圆心位置处的第一凸部8c、可转动地设于第一转盘凸部处的第一连杆8d、设于下小臂外壳内且位于第一电机下方的第二电机8e、设于第二电机上的第二转盘8f、设于第二转盘远离圆心位置处的第二凸部8g以及可转动地设于第二凸部上的第二连杆8h,所述手掌外壳设有分别与第一连杆和第二连杆活动连接的活动部8i;优选地下小臂与手掌外壳通过万向节进行铰接,所述第一转盘和第二转盘不位于同一纵轴线上。
24.由于第一转盘上的第一凸部位于横向一侧,第二转盘上的第二凸部位于横向另一
侧,第一凸部和第二凸部到圆心位置直线呈水平状态设置,第一电机带动第一转盘顺时针旋转45度,第一转盘通过第一凸部带动第一连杆对手掌外壳向左上方回拉,第二电机也带动第二转盘顺时针旋转45度,第二转盘通过第二凸部带动第二连杆对手掌外壳向左上方推动,使手掌向横向一侧摆动,第一电机再带动第一转盘逆向旋转45度,第二电机也带动第二转盘逆向旋转45度后,将带动手掌外壳横向右侧摆动,第一电机和第二电机往复运动可带动手掌外壳左右灵活摆动,完成两个循环后,手掌位于下手臂外壳中部位置,第一凸部和第二凸部到圆心位置直线呈水平状态设置,然后第一电机带动第一转盘逆时针旋转,第二电机带动第二转盘顺时针旋转,将推动手掌外壳向前摆动,第一转盘和第二转盘上的第一凸部和第二凸部从底部旋转到顶部位置时,第一连杆和第二连杆将向下推动手掌外壳,手掌外壳将向前摆动,第一电机和第二电机旋转方向不同,可持续控制手掌前后招手,驱动手掌的驱动结构隐藏在下小臂外壳内,更美观,可快速完成左右招手和前后招手,使用灵活。
25.所述手掌外壳横向一侧上可转动地设有大拇指8k,所述第二大拇指与手掌外壳x轴方向进行铰接,所述大拇指与手掌外壳连接处设有铰接块8l,所述铰接块与手掌外壳进行铰接,所述铰接块外侧固设有拉线8m,所述手掌外侧内设有用于拉线卷绕的第一收线轮8n,所述第一收线轮与手掌外壳连接处设有扭力弹簧8o,所述手掌外壳位于大拇指下方设有第二收线轮8p,所述手掌外壳内设有用于驱动第二收线轮旋转的轮电机8q。
26.通过大拇指的设置,其中大拇指需要朝向手指面方向时,轮电机带动第二收线轮旋转,第二收线轮对拉线拉紧,第二拉线将带动铰接块旋转,铰接块带动大拇指在手掌外壳上向掌心位置处旋转,直至大拇指直面朝向手指指面,大拇指和手指弯曲时,可以呈抓握状态,可以使模特手里抓握物品,例如羽毛球拍、哑铃等,随着仿真手臂和手掌外壳摆动,更方便抓握运动器材展示。
27.所述第一上大臂外壳、第二上大臂外壳以及下大臂外壳包围拼接形成手臂骨架a,所述手臂骨架顶面形状为平面a1,所述手臂骨架靠近上小臂外壳一侧具有下凹弧形a2,所述手臂骨架底部具有向上凹的凹部a3,所述手臂骨架左右两侧到中部逐渐向下凸起,所述手臂骨架顶部位于平面处设有第一仿真肌肉充气硅胶a4,所述第一仿真肌肉充气硅胶底面与平面贴合,所述第一仿真肌肉充气硅胶中部设有向上凸起的肱凸部a41,所述第一仿真肌肉充气硅胶左部具有与肱凸部平滑过渡的小肱部a42,所述小肱部内设有多个支撑薄片a43,所述支撑薄片为从左到右、从小到上倾斜,位于所述小肱部中部的支撑薄片高度大于横向两侧的支撑薄片,所述支撑薄片中部均设有第一通气孔a4a,所述小肱部与肱凸部交接处设有间隔薄片a44,所述间隔薄片上设有第二通孔a45,所述小肱部右侧设有第一封闭薄片a46,所述第一仿真肌肉充气硅胶位于相邻支撑薄片处设有第一连通阀a47,所述第一仿真肌肉充气硅胶位于间隔薄片和封闭薄片之间设有第二连通阀a48,所述第一连通阀和第二连通阀均与第一仿真肌肉充气硅胶相连通。
28.通过第一仿真肌肉充气硅胶的设置,其中使用前将各个连通阀通过外部气动控制系统连通,当用于运动模特的仿真手臂穿紧身衣服时,由于第一仿真肌肉充气硅胶的小肱部具有支撑薄片,在非运动状态下,支撑薄片将对小肱部处从右向左形成小的凸起,间隔薄片高度小于支撑薄片高度,小肱部中间到肱凸部中间将形成从右下下降,然后在间隔薄片处逐渐向上的曲线,该形状与人体肌肉曲线更相近,可避免在充气状态第一仿真肌肉充气硅胶小肱部和肱凸部之间被空气填充隆起的缺点;
29.在第一连通阀通气时,由于第一仿真肌肉充气硅胶位于小肱部有支撑薄片支撑,可限制充气状态下第一仿真肌肉充气硅胶的小肱部膨胀过大,避免如果没有支撑薄片和间隔薄片,小肱部和肱凸部将形成一个中部向上凸起的凸部,使第一仿真肌肉充气硅胶线条曲线与人体手臂仿真性好;优选地,上小臂外壳顶部也具有凹陷部a9,所述凹陷部设有硅胶套a10,所述硅胶套内设有膨胀填充物a11,硅胶套表面具有多个细小透气孔,当仿真手臂处于运动状态,需要紧身衣物、展示哑铃、弹性带或其它手部运动状态的器材时,第四驱动装置驱动上小臂外壳旋转到下大臂外壳右上方,上小臂外壳移动到手臂骨架的下凹弧形处,膨胀填充物受到挤压变扁,硅胶套将空气从细小透气孔排出,同时对小肱部的下凹弧形挤压贴合,第一仿真肌肉充气硅胶的小肱部位置将被压扁,膨胀填充物柔软,与第一仿真肌肉充气硅胶位于小肱部位置接触时,可对其进行保护,并且间隔薄片形状为倾斜状态,小肱部受到挤压时,上小臂外壳运动阻力更小,支撑薄片倾斜受压后贴合在底部时,相比直角的支撑薄片更容易摆动,从右向下方向下压也更不易损坏,与上小臂外壳配合使用时,小肱部压扁收缩后的体积更小,小肱部内的空气通过支撑薄片上的第一通气孔,然后再通过间隔薄片的第二通气孔进入第一仿真肌肉充气硅胶肱凸部位置,第一仿真肌肉充气硅胶肱凸部将受到充气膨胀,该结构可模仿人体肱二头运动状态,尤其在健身器材店哑铃或者其它器材做展示时,对手臂仿真状态好;下凹弧形的和凹陷部的设置,是上小臂外壳和下大臂外壳旋转角度更大,并且可容纳收缩后的膨胀填充物和小肱部,对上小臂外壳和下大臂外壳旋转角度影响小。
30.所述手臂骨架位于凹部处贴合设有第二仿真肌肉充气硅胶a5,所述第二仿真肌肉充气硅胶中部设有两个间隔设置的第二封闭薄片a51,所述第二封闭薄片与第二仿真肌肉充气硅胶横向两侧处设有第三连通阀a52,所述第二封闭薄片中部设有第四连通阀a53。
31.通过第二仿真肌肉充气硅胶的设置,其中由于手臂骨架底部具有向上凹的凹部,手臂骨架左右两侧到中部逐渐向下凸起,第二仿真肌肉充气硅胶通过第三连通阀和第四连通阀与手臂骨架安装,第二仿真肌肉充气硅胶中下部将呈向下曲线,与人体曲率更贴合;第二封闭薄片和第三封闭薄片的设置,可将第二仿真肌肉充气硅胶分割成3个独立的分区,第二仿真肌肉充气硅胶第二封闭薄片和第三封闭薄片之间封闭空间横向宽度大于第二仿真肌肉充气硅胶横向两侧封闭空间宽度,可以形成三个独立控制区域,方便使用时不同封闭空间大小。
32.所述手臂骨架位于横向两侧设有第三仿真肌肉充气硅胶a6,所述第三仿真肌肉充气硅胶靠近支撑骨架一端设有第五连通阀a61,所述第一连通阀、第二连通阀、第三连通阀、第四连通阀以及第五连通阀均穿过手臂骨架,所述第二连通阀孔内径尺寸大于第四连通阀孔内径尺寸大于第一连通阀和第三连通阀孔内径尺寸,所述第一连通阀和第三连通阀孔内径尺寸为3mm~5mm,所述第四连通阀孔内径尺寸为6~7mm,所述第二连通阀孔内径尺寸为7~12mm,所述第五连通阀内径尺寸与第一连通阀尺寸相同。
33.由于第一连通阀、第二连通阀、第三连通阀、第四连通阀以及第五连通阀均穿过手臂骨架,可将各连通阀远离仿真肌肉充气硅胶一端通过螺母固定在手臂骨架内,方便对各仿真肌肉充气硅胶进行固定,并且通过连接阀安装在手臂骨架上美观性好,外部气路系统可以直接从手臂骨架内布设管道,与各个连通阀相连通,可避免气路管道布设时,从仿真肌肉充气硅胶表面布设,影响使用效果的缺点;需要将各仿真肌肉充气硅胶调整至壮硕体态
时,各连通阀同时通气,由于第二连通阀孔内径尺寸大于第四连通阀孔内径尺寸大于第一连通阀和第三连通阀孔内径尺寸,由于第二连通阀孔内径尺寸大,相同的通气时间肱凸部鼓起体积更大,小肱部、第三仿真肌肉充气硅胶以及第二仿真肌肉充气硅胶相同的通气时间只鼓起部分,第二仿真肌肉充气硅胶中间位置相同的通气时间比横向两侧位置鼓的更凸起,但小于肱凸部,同时充气可快速调整仿真手臂至壮硕状态,并且由于各个连通阀孔内径不同,可对仿真肌肉充气硅胶等比例扩大,各个仿真肌肉充气硅胶鼓起也能保持仿真形态,部分健身产品,为了迎合增肌人群展示,可将各仿真肌肉充气硅胶膨胀变大,视觉上更有力量感,可更佳凸显模特手臂力量感,穿紧身衣或者束带展示时,尺寸不适配时,也可以通过各连通阀充气放弃进行调整,并且不影响仿真肌肉充气硅胶仿真效果。
34.所述第一仿真肌肉充气硅胶、第二仿真肌肉充气硅胶以及第三仿真肌肉充气硅胶外侧包覆设有人造仿皮a7,所述第一仿真肌肉充气硅胶表面设有多个的细管a8,所述细管与第一仿真肌肉充气硅胶进行黏贴,所述细管位于间隔薄片和第一封闭薄片处设有延伸管a81,所述延伸管与第一仿真肌肉充气硅胶相连通。
35.第一仿真肌肉充气硅胶的设置,其中细管体积小,约为3mm~6mm直径尺寸,在手臂硅胶覆盖状态下,可仿真人体血管,并且第四驱动装置驱动上小臂外壳旋转到下大臂外壳右上方,上小臂外壳移动到手臂骨架的下凹弧形处,第一仿真肌肉充气硅胶的小肱部位置将被压扁,小肱部内的空气通过支撑薄片上的第一通气孔,然后再通过间隔薄片的第二通气孔进入第一仿真肌肉充气硅胶肱凸部位置,由于细管通过延伸管与第一仿真肌肉充气硅胶相连通,第一仿真肌肉充气硅胶肱凸部将收到充气膨胀,第一仿真肌肉充气硅胶肱凸部气压上升,细管也将膨胀增大,第四驱动装置驱动上小臂外壳旋转到下大臂外壳右上方时,第一仿真肌肉充气硅胶上细管增大可仿真人体将肱二头发力暴起的血管,提升对血管的仿真效果,并且无需额外气路控制系统,使用时零件更少,仿真手臂使用前调整好各个仿真肌肉充气硅胶大小后,外部压缩机无需再运行,使用噪音无,直接上小臂外壳和下大臂外壳运动过程中,即可对肱凸部和细管状态进行变化。
36.可以参考图9,可参考与机器人使用状态,具体包括盆体外壳1、间隔设于盆体外壳上方的胸脯外壳2、铰接设于盆体外壳和胸脯外壳之间的第一气弹簧3、间隔设于胸脯外壳上方的头外壳4、铰接设于头外壳和胸脯外壳之间的第二气弹簧5、设于胸脯外壳顶部横向两侧的连接环6、铰接设于连接环与胸脯外壳之间的第三气弹簧7、设于连接环内侧的仿真手臂8、设于盆体外壳底部的仿真腿9以及连接柱10,所述连接柱底部穿过头外壳和胸脯外壳,所述连接柱底部与胸脯外壳相连接,所述胸脯外壳从底部到顶部面积逐渐减小;所述头外壳上设有用于覆盖连接柱的假发10a,假发可以做造型,不仅更美观,可以隐藏顶部的连接柱子。
37.需要调整用于运动模特的仿真手臂姿势时,例如头部位置时,两个人同时按住头外壳前后两个第一气弹簧内置按钮,在摆动头外壳可任意调整头外壳姿势,可根据展示柜展示物的不同,来调整用于运动模特的仿真手臂的姿势,该结构调整姿势后造型可保持稳定,避免仿真手动活动过程中,用于运动模特的仿真手臂姿势受力容易产生变化,第一气弹簧、第二气弹簧、第三气弹簧以及仿真腿均为现有常规技术,在此不予赘述;连接柱可与外部头顶支撑架相连,防止用于运动模特的仿真手臂容易摔倒的问题。
38.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性
或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
39.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
40.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
41.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
42.尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1