一种移动灵活的巡逻机器人的制作方法
1.本发明属于巡逻机器人技术领域,具体为一种移动灵活的巡逻机器人。
背景技术:
2.如今的室内消防领域中,主要还是以人防为核心,大量资源投入到人力值班、人力巡逻、固定摄像头安置上。但是因摄像头难以实现整体全覆盖、安装成本高、并且其具体使用仍需依赖专门的人员进行24小时不间断监管,导致人力资源开销较大,安全性难以得到保证。各大酒店、商场陆续出现代替人工服务的机器人,该类机器人具有不怕危险,错误率低,安全性能好的优点,但是功能较为单一,体积较大,移动缓慢不够灵活。
3.现有技术中的巡逻机器人,在使用过程中,针对应用在商场酒店等场合的巡逻机器人,通常利用其托盘进行目标物品的装载和运送,然而目前的物件直接放置在托盘上方,对于部分重心较高的物件,在运送过程中,机器人在收到碰撞和震动时,容易使得托盘上放置的物件抖动倾倒,甚至出现掉落摔坏等情况,实际运送重心较高物件时缺乏较好的放置稳定性,实际运送效果不佳。
4.此外,现有技术中的巡逻机器人,在路面不平的场所进行移动运送物件时,由于实际实用环境复杂,尽管履带式的移动方式具有良好的运动效果,针对阶梯处移动运送时,仍然存在机器人侧翻的情况,虽然实际机器人侧翻情况较少,但少数侧翻时仍然会造成运送物品的碰撞甩出,造成运输物件的损坏,实际在出现侧翻时,针对运送物品缺乏有效的保护措施,实际运输时运输物件的安全性较差。
技术实现要素:
5.本发明的目的在于提供一种移动灵活的巡逻机器人,以解决上述背景技术中提出的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种移动灵活的巡逻机器人,包括安装座,所述安装座的侧面设有移动履带,所述安装座的顶面固定安装有固定座,所述固定座的顶面活动套接有机体,所述机体的侧面固定安装有机器臂,所述机器臂的端面固定连接有固定板,所述固定板的顶面固定安装有托盘,所述托盘的顶面开设有一号孔,所述固定板的顶面和内部分别开设有二号孔和内腔,所述固定板的底面设有抽吸机构,所述固定板的正面开设有安装孔,所述安装孔与二号孔相连通,所述安装孔的内部活动套接有安装管,所述安装管的外表面开设有侧孔,所述安装管的端面固定安装有固定套,所述固定套的内表面活动套接有螺纹杆,所述安装孔的内表面固定套接有螺纹套,所述螺纹套的内表面与螺纹杆螺纹套接。
7.第一实施例:如图1、图2、图3、图4、图5和图6所示,当进行物件运送时,将物件放置在托盘的内部,并盖住目标位置的一号孔,根据一号孔的对应位置旋转对应的螺纹杆,使得螺纹杆向外旋转移动并拉动安装管向外移动,使得安装管上的侧孔与二号孔、一号孔对齐,启动抽吸机构,随着抽吸机构从固定板中的内腔中抽吸空气,使得放置在托盘上的物件向
下吸附固定,进行运送即可。
8.首先,通过在固定板的正面开设安装孔,使得安装孔与二号孔连通,并在安装孔中套设安装管,使得安装管外表面开设侧孔,且侧孔与二号孔错位,使得内腔与二号孔保持密封,并在将需要运送物件放置在托盘内的一号孔上方时,根据实际密封住一号孔位置,进行安装管的调节,通过拉动安装管使得侧孔与二号孔连通,并配合抽吸机构从内腔中抽吸空气,使得内腔处于负压环境下,实现一号孔上方物件的吸附固定,提供实际运送过程中的稳定,避免重心加高的物件在运送过程中出现倾倒摔落,提高运送效果。
9.优选的,所述固定套的内部开设有环槽,所述环槽的内表面活动套接有卡环,所述卡环的内表面与螺纹杆固定套接,通过利用环槽与卡环的活动套接,使得螺纹杆旋转横移时,带动安装管横移。
10.优选的,所述安装管的前端固定连接有弹簧的一端,所述弹簧的另一端与螺纹套固定连接,通过利用弹簧弹性压缩安装管,使得安装管稳定,避免晃动,所述安装孔的内部固定连接有定位杆,所述定位杆与安装管活动套接,通过利用矩形的定位杆与安装管活动套接,保证密封的同时,使得安装管具有稳定的移动效果,避免旋转,使得侧孔横移后可以与二号孔连通。
11.优选的,所述抽吸机构包括安装框、抽吸泵和气管,所述安装框固定连接在固定板的底面上,所述抽吸泵固定安装在安装框的内部,所述气管固定连通在抽吸泵的侧面上,所述气管的上端与固定板固定连通,通过利用抽吸泵配合气管实现内腔中的空气抽吸,在负压情况下,使得托盘上的物件吸附固定。
12.优选的,所述安装座的顶面开设有顶部腔,所述固定座的底面开设有底部槽,所述顶部腔和底部槽相连通,所述顶部腔的底部分别固定安装有一号伸缩杆和固定管,所述一号伸缩杆的顶面与机体固定连接,所述机体的底面固定连接有活动杆,所述活动杆与固定管活动套接,通过利用一号伸缩杆带动机体下移,从而实现活动杆挤压固定管中的空气,将空气输送到一号管中。
13.优选的,所述固定板的顶面固定安装有二号伸缩杆,所述二号伸缩杆的顶面固定连接有顶部板,所述顶部板的数量为两个,两个所述顶部板之间固定套接有气囊,所述顶部板的端面开设有套接槽,所述套接槽的内表面与气囊固定套接,通过利用套接槽实现气囊的部分固定,保证气囊具有稳定的变形空间,且二号伸缩杆可根据实际托盘中的物件高度,进行气囊的调节,保证适应不同高度的物件进行保护。
14.优选的,所述顶部板的内部开设有曲孔,所述曲孔的一端与气囊相连通,所述顶部板的背面固定连接有二号管,所述二号管与曲孔的另一端相连通,通过利用曲孔将挤压的空气输送到气囊中。
15.优选的,所述机器臂的顶面和侧面分别开设有一号通孔和二号通孔,所述一号通孔与二号管相连通,所述机器臂侧面固定连接有一号管,所述一号管的上端与二号通孔相连通,所述一号管的下端与固定管固定连通,通过利用一号管和二号管,实现压缩空气的引导,将压缩空气挤压至气囊中,实现气囊的充气鼓起。
16.优选的,所述安装座的正面设有智能感应识别装置,所述安装座的侧面固定连接有存储盘,所述存储盘位于一号管的下方,通过利用智能感应识别装置及时发现路面情况,判断路面障碍,配合机器人芯片,处理越障指令,存储盘用于承接柔性的一号管,保证机体
下降过程中,多余的一号管承接在存储盘上,避免拖拽。
17.优选的,所述机体的正面开设有显示屏,所述机体的正面固定安装有位于显示屏上方的摄像头,通过显示屏方便展示信息,且摄像头用于检测环境。
18.第二实施例:如图1、图2、图7、图、8、图9和10所示,当需要进行复杂环境运送时,智能感应识别装置检测到需要越过阶梯位置,使得一号伸缩杆下降,从而使得机体沿着固定座的内部向下移动,从而使得机体底面上的活动杆向下沿着固定管下滑,将固定管中的空气挤压至一号管中,随着机体下移,机器人重心下降,且一号管将挤压的空气通过机器臂上的一号通孔和二号通孔输送到二号管中,并通过曲孔输送到气囊中,使得气囊充气膨胀并逐渐盖住托盘的上方,使得托盘内的物件受到向下的压力并保护在气囊的底部,随着机器人移动并在较大震动下越过阶梯。
19.首先,在进行阶梯越过时,通过降低机体,进而使得机体底部的活动杆向下挤压固定管中的空气,从而将固定管中的空气通过一号管和二号管挤压输送到气囊中,通过使得气囊充气鼓起,使得鼓起的气囊压住托盘上的运输物,实现对运输物的固定和保护,在越过阶梯等震动明显的障碍时,保证机器人可以实现运输物件的保护效果,提高了复杂环境下的运送质量。
20.此外,通过使得机体套接在固定座的内部,并利用一号伸缩杆与机体移动,配合智能感应识别装置判断路面环境,针对影响较大的障碍时,通过控制机体下移,降低机器人整体重心,并在进行越障时,大大提高了实际移动稳定性,配合移动履带,提高了机器人越障的稳定性,移动可靠且巡逻效果好。
21.本发明的有益效果如下:
22.1、本发明通过在固定板的正面开设安装孔,使得安装孔与二号孔连通,并在安装孔中套设安装管,使得安装管外表面开设侧孔,且侧孔与二号孔错位,使得内腔与二号孔保持密封,并在将需要运送物件放置在托盘内的一号孔上方时,根据实际密封住一号孔位置,进行安装管的调节,通过拉动安装管使得侧孔与二号孔连通,并配合抽吸机构从内腔中抽吸空气,使得内腔处于负压环境下,实现一号孔上方物件的吸附固定,提供实际运送过程中的稳定,避免重心加高的物件在运送过程中出现倾倒摔落,提高运送效果。
23.2、本发明通过在进行阶梯越过时,通过降低机体,进而使得机体底部的活动杆向下挤压固定管中的空气,从而将固定管中的空气通过一号管和二号管挤压输送到气囊中,通过使得气囊充气鼓起,使得鼓起的气囊压住托盘上的运输物,实现对运输物的固定和保护,在越过阶梯等震动明显的障碍时,保证机器人可以实现运输物件的保护效果,提高了复杂环境下的运送质量。
24.3、本发明通过使得机体套接在固定座的内部,并利用一号伸缩杆与机体移动,配合智能感应识别装置判断路面环境,针对影响较大的障碍时,通过控制机体下移,降低机器人整体重心,并在进行越障时,大大提高了实际移动稳定性,配合移动履带,提高了机器人越障的稳定性,移动可靠且巡逻效果好。
附图说明
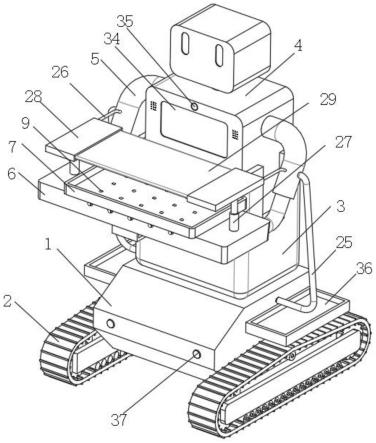
25.图1为本发明的结构示意图;
26.图2为本发明的剖视示意图;
27.图3为本发明固定板和托盘的爆炸示意图;
28.图4为本发明固定板的剖视示意图;
29.图5为图4中a处的结构放大示意图;
30.图6为图4中b处的结构放大示意图;
31.图7为本发明顶部板气囊之间的爆炸示意图;
32.图8为本发明顶部板的顶面剖视示意图;
33.图9为本发明机器臂的结构示意图;
34.图10为本发明固定管和一号管之间的连接示意图。
35.图中:1、安装座;2、移动履带;3、固定座;4、机体;5、机器臂;6、固定板;7、托盘;8、抽吸机构;81、安装框;82、抽吸泵;83、气管;9、一号孔;10、二号孔;11、内腔;12、安装孔;13、安装管;14、侧孔;15、固定套;16、环槽;17、卡环;18、螺纹杆;19、螺纹套;20、底部槽;21、顶部腔;22、一号伸缩杆;23、固定管;24、活动杆;25、一号管;26、二号管;27、二号伸缩杆;28、顶部板;29、气囊;30、套接槽;31、曲孔;32、一号通孔;33、二号通孔;34、显示屏;35、摄像头;36、存储盘;37、智能感应识别装置;38、弹簧;39、定位杆。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.如图1至图10所示,本发明实施例提供了一种移动灵活的巡逻机器人,包括安装座1,安装座1的侧面设有移动履带2,安装座1的顶面固定安装有固定座3,固定座3的顶面活动套接有机体4,机体4的侧面固定安装有机器臂5,机器臂5的端面固定连接有固定板6,固定板6的顶面固定安装有托盘7,托盘7的顶面开设有一号孔9,固定板6的顶面和内部分别开设有二号孔10和内腔11,固定板6的底面设有抽吸机构8,固定板6的正面开设有安装孔12,安装孔12与二号孔10相连通,安装孔12的内部活动套接有安装管13,安装管13的外表面开设有侧孔14,安装管13的端面固定安装有固定套15,固定套15的内表面活动套接有螺纹杆18,安装孔12的内表面固定套接有螺纹套19,螺纹套19的内表面与螺纹杆18螺纹套接。
38.第一实施例:如图1、图2、图3、图4、图5和图6所示,当进行物件运送时,将物件放置在托盘7的内部,并盖住目标位置的一号孔9,根据一号孔9的对应位置旋转对应的螺纹杆18,使得螺纹杆18向外旋转移动并拉动安装管13向外移动,使得安装管13上的侧孔14与二号孔10、一号孔9对齐,启动抽吸机构8,随着抽吸机构8从固定板6中的内腔11中抽吸空气,使得放置在托盘7上的物件向下吸附固定,进行运送即可。
39.首先,通过在固定板6的正面开设安装孔12,使得安装孔12与二号孔10连通,并在安装孔12中套设安装管13,使得安装管13外表面开设侧孔14,且侧孔14与二号孔10错位,使得内腔11与二号孔保持密封,并在将需要运送物件放置在托盘7内的一号孔9上方时,根据实际密封住一号孔9位置,进行安装管13的调节,通过拉动安装管13使得侧孔14与二号孔10连通,并配合抽吸机构8从内腔11中抽吸空气,使得内腔11处于负压环境下,实现一号孔9上方物件的吸附固定,提供实际运送过程中的稳定,避免重心加高的物件在运送过程中出现
倾倒摔落,提高运送效果。
40.其中,固定套15的内部开设有环槽16,环槽16的内表面活动套接有卡环17,卡环17的内表面与螺纹杆18固定套接,通过利用环槽16与卡环17的活动套接,使得螺纹杆18旋转横移时,带动安装管13横移。
41.其中,安装管13的前端固定连接有弹簧38的一端,弹簧38的另一端与螺纹套19固定连接,通过利用弹簧38弹性压缩安装管13,使得安装管13稳定,避免晃动,安装孔12的内部固定连接有定位杆39,定位杆39与安装管13活动套接,通过利用矩形的定位杆39与安装管13活动套接,保证密封的同时,使得安装管13具有稳定的移动效果,避免旋转,使得侧孔14横移后可以与二号孔10连通。
42.其中,抽吸机构8包括安装框81、抽吸泵82和气管83,安装框81固定连接在固定板6的底面上,抽吸泵82固定安装在安装框81的内部,气管83固定连通在抽吸泵82的侧面上,气管83的上端与固定板6固定连通,通过利用抽吸泵82配合气管83实现内腔11中的空气抽吸,在负压情况下,使得托盘7上的物件吸附固定。
43.其中,安装座1的顶面开设有顶部腔21,固定座3的底面开设有底部槽20,顶部腔21和底部槽20相连通,顶部腔21的底部分别固定安装有一号伸缩杆22和固定管23,一号伸缩杆22的顶面与机体4固定连接,机体4的底面固定连接有活动杆24,活动杆24与固定管23活动套接,通过利用一号伸缩杆22带动机体4下移,从而实现活动杆24挤压固定管23中的空气,将空气输送到一号管25中。
44.其中,固定板6的顶面固定安装有二号伸缩杆27,二号伸缩杆27的顶面固定连接有顶部板28,顶部板28的数量为两个,两个顶部板28之间固定套接有气囊29,顶部板28的端面开设有套接槽30,套接槽30的内表面与气囊29固定套接,通过利用套接槽30实现气囊29的部分固定,保证气囊29具有稳定的变形空间,且二号伸缩杆27可根据实际托盘7中的物件高度,进行气囊29的调节,保证适应不同高度的物件进行保护。
45.其中,顶部板28的内部开设有曲孔31,曲孔31的一端与气囊29相连通,顶部板28的背面固定连接有二号管26,二号管26与曲孔31的另一端相连通,通过利用曲孔31将挤压的空气输送到气囊29中。
46.其中,机器臂5的顶面和侧面分别开设有一号通孔32和二号通孔33,一号通孔32与二号管26相连通,机器臂5侧面固定连接有一号管25,一号管25的上端与二号通孔33相连通,一号管25的下端与固定管23固定连通,通过利用一号管25和二号管26,实现压缩空气的引导,将压缩空气挤压至气囊29中,实现气囊29的充气鼓起。
47.其中,安装座1的正面设有智能感应识别装置37,安装座1的侧面固定连接有存储盘36,存储盘36位于一号管25的下方,通过利用智能感应识别装置37及时发现路面情况,判断路面障碍,配合机器人芯片,处理越障指令,存储盘36用于承接柔性的一号管25,保证机体4下降过程中,多余的一号管25承接在存储盘36上,避免拖拽。
48.其中,机体4的正面开设有显示屏34,机体4的正面固定安装有位于显示屏34上方的摄像头35,通过显示屏34方便展示信息,且摄像头35用于检测环境。
49.第二实施例:如图1、图2、图7、图、8、图9和10所示,当需要进行复杂环境运送时,智能感应识别装置37检测到需要越过阶梯位置,使得一号伸缩杆22下降,从而使得机体4沿着固定座3的内部向下移动,从而使得机体4底面上的活动杆24向下沿着固定管23下滑,将固
定管23中的空气挤压至一号管25中,随着机体4下移,机器人重心下降,且一号管25将挤压的空气通过机器臂5上的一号通孔32和二号通孔33输送到二号管26中,并通过曲孔31输送到气囊29中,使得气囊29充气膨胀并逐渐盖住托盘7的上方,使得托盘7内的物件受到向下的压力并保护在气囊29的底部,随着机器人移动并在较大震动下越过阶梯。
50.首先,在进行阶梯越过时,通过降低机体4,进而使得机体4底部的活动杆24向下挤压固定管23中的空气,从而将固定管23中的空气通过一号管25和二号管26挤压输送到气囊29中,通过使得气囊29充气鼓起,使得鼓起的气囊29压住托盘7上的运输物,实现对运输物的固定和保护,在越过阶梯等震动明显的障碍时,保证机器人可以实现运输物件的保护效果,提高了复杂环境下的运送质量。
51.此外,通过使得机体4套接在固定座3的内部,并利用一号伸缩杆22与机体4移动,配合智能感应识别装置37判断路面环境,针对影响较大的障碍时,通过控制机体4下移,降低机器人整体重心,并在进行越障时,大大提高了实际移动稳定性,配合移动履带2,提高了机器人越障的稳定性,移动可靠且巡逻效果好。
52.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
53.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1