一种隐藏式大范围机械限位结构及机器人旋转关节的制作方法
1.本发明属于机器人技术领域,涉及一种隐藏式大范围机械限位结构及机器人旋转关节。
背景技术:
2.机器人多数运动为关节旋转运动,在运行过程中出于安全考虑需设计机械限位装置,用于在软限位失效时对关节旋转的角度起限位作用,以控制机器人在有限的范围内运动并减少撞击冲击力,从而保护机器人线缆、减速机、臂体等结构和操作人员及周边设备安全。如图1所示,现有机器人关节旋转的机械限位装置903一般为暴露在臂体一901和臂体二902外部的突起装置;且控制的运动范围一般都小于
±
180
°
,既影响空间利用率也影响美观。当关节旋转需要的运动范围超过
±
180
°
无法满足需求。另外,突起装置是臂体一901的一部分,如果损坏需要整体更换臂体,维修成本高。
技术实现要素:
3.针对上述现有技术的不足,本发明所要解决的技术问题是:提供一种用于机器人旋转关节的隐藏式大范围机械限位的机器人旋转关节结构。
4.为达到上述目的,本发明提供如下技术方案:
5.一种用于机器人旋转关节的隐藏式大范围机械限位结构,包括环形的减速机安装板,所述减速机安装板上沿圆周方向设置有圆弧形的第一弧形通孔,所述第一弧形通孔中滑动设置有移动限位组件,所述移动限位组件的下部向下冒出第一弧形通孔的下孔口;所述减速机安装板的下方设置有固定限位块,所述固定限位块位于移动限位组件的下部的转动路径上。
6.进一步的,所述移动限位组件包括设置在第一弧形通孔的上方的上限位块、设置在第一弧形通孔下方的下限位块以及至少一个连接上限位块和下限位块的连接螺栓,所述连接螺栓穿设在第一弧形通孔中。
7.进一步的,所述减速机安装板上设置有第一限位调节组件和第二限位调节组件,所述第一限位调节组件和第二限位调节组件分别位于第一弧形通孔的两端。
8.进一步的,所述第一限位调节组件和第二限位调节组件的形状均为圆弧形,所述第一限位调节组件上开设有一圆弧形的第二弧形通孔;所述第一限位调节组件上设置有至少一个第一调节组件固定螺栓,所述第一调节组件固定螺栓的螺纹端穿过第二弧形通孔并螺接在减速机安装板上;所述第二限位调节组件上开设有一圆弧形的第三弧形通孔;所述第二限位调节组件上设置有至少一个第二调节组件固定螺栓,所述第二调节组件固定螺栓的螺纹端穿过第三弧形通孔并螺接在减速机安装板上。
9.进一步的,两个所述第二弧形通孔的圆弧半径与第一弧形通孔的圆弧半径相同。
10.进一步的,所述减速机安装板的中部设置有环形的第一凸台,所述第一限位调节组件和第二限位调节组件均位于第一凸台的外侧。
11.一种具有隐藏式大范围机械限位结构的机器人旋转关节,包括第一臂体、第二臂体、减速机以及用于机器人旋转关节的隐藏式大范围机械限位结构;所述减速机包括第一减速机旋转组件和转动设置在第一减速机旋转组件上的第二减速机旋转组件,所述第一减速机旋转组件与第一臂体固定连接,所述固定限位块螺接固定连接在第一减速机旋转组件上;所述第二减速机旋转组件与减速机安装板固定连接,所述减速机安装板与第二臂体固定连接。
12.进一步的,所述第一减速机旋转组件和第二减速机旋转组件均为中空的环形结构,所述第一减速机旋转组件的内侧设置有一圈环形的突起,外侧设置有环形的第二凸台,所述固定限位块螺接固定在第二凸台上;在所述第二凸台和环形的突起之间形成有环形槽,所述第二减速机旋转组件的第一端伸入环形槽中,所述第二减速机旋转组件的第二端冒出固定限位块的上端面,并与减速机安装板固定连接。
13.进一步的,所述第一臂体和第二臂体均呈筒状,所述第一臂体的内壁上设置有一圈环状的第一凸沿,所述第一减速机旋转组件伸入第一臂体中,所述第二凸台固定连接在第一凸沿上;所述第二臂体的内壁上设置有一圈环状的第二凸沿,所述第二凸沿与减速机安装板及第二减速机旋转组件固定连接。
14.进一步的,所述突起的上端向上依次穿过第二减速机旋转组件和减速机安装板,并冒出第二凸沿的上端面,所述突起、第一臂体和第二臂体围合后形成环形的空腔,所述第一减速机旋转组件、第二减速机旋转组件和隐藏式大范围机械限位结构均位于空腔中。
15.本发明中,通过采用在减速机安装板上开设第一弧形通孔,并在第一弧形通孔中设置移动限位组件的方式,可以大幅增加机器人旋转关节的转动范围,实现大范围的机械限位;移动限位组件和固定限位块即采用螺接的方式固定,在损坏时可单独更换移动限位组件或固定限位块,无需整体更换臂体,维修成本低;通过设置第一限位调节组件和第二限位调节组件,还可以对机器人旋转关节的机械限位范围进行调节,结构简单,使用方便,成本低。
附图说明
16.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
17.图1为现有技术中一种常见的机器人旋转关节机械限位结构。
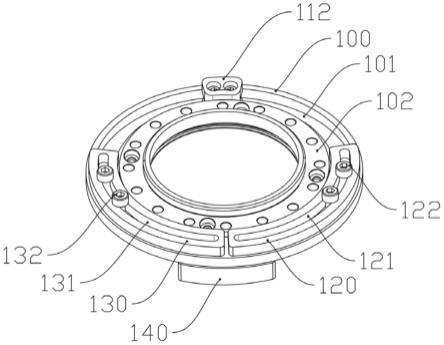
18.图2为本发明一种用于机器人旋转关节的隐藏式大范围机械限位结构的一个优选实施例的结构示意图。
19.图3为图2的爆炸图。
20.图4为本发明一种具有隐藏式大范围机械限位结构的机器人旋转关节的一个优选实施例的爆炸图。
21.图5为机器人旋转关节处于初始状态时的示意图。
22.图6为机器人旋转关节顺时针旋转230
°
时的示意图。
23.图7为机器人旋转关节逆时针旋转230
°
时的示意图。
24.附图中各标号的含义为:
25.减速机安装板-100;第一弧形通孔-101;第一凸台-102;安装板固定螺栓-103;
26.移动限位组件-110;连接螺栓-111;上限位块-112;下限位块-113;
27.第一限位调节组件-120;第二弧形通孔-121;第一调节组件固定螺栓-122;
28.第二限位调节组件-130;第三弧形通孔-131;第二调节组件固定螺栓-132;
29.固定限位块-140;限位块固定螺栓-141;
30.第一减速机旋转组件-210;突起-211;第二凸台-212;环形槽-213;
31.第二减速机旋转组件-220;
32.第一臂体-310;第一凸沿-311;第一臂体固定螺栓-312;
33.第二臂体-320;第二凸沿-321;第二臂体固定螺栓-322;
34.臂体一-901;臂体二-902;机械限位块-903。
具体实施方式
35.以下通过特定的具体实例说明本发明的实施方式,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
36.如图2和图3所示,本发明公开了一种用于机器人旋转关节的隐藏式大范围机械限位结构,本发明一种用于机器人旋转关节的隐藏式大范围机械限位结构的一个优选实施例包括环形的减速机安装板100,所述减速机安装板100上沿圆周方向设置有圆弧形的第一弧形通孔101,所述第一弧形通孔101的圆弧角度优选为120
°
,当然,第一弧形通孔101的圆弧角度也可以大于或小于120
°
,可根据机器人旋转关节所需的转动范围进行选择。
37.所述第一弧形通孔101中滑动设置有移动限位组件110,所述移动限位组件110的下部向下冒出第一弧形通孔101的下孔口。所述移动限位组件110包括设置在第一弧形通孔101的上方的上限位块112、设置在第一弧形通孔101下方的下限位块113以及至少一个连接上限位块112和下限位块113的连接螺栓,本实施例中,优选为上限位块112和下限位块113通过两个连接螺栓111连接,两个所述连接螺栓均穿设在第一弧形通孔101中。所述减速机安装板100的下方设置有固定限位块140,所述固定限位块140位于下限位块113的转动路径上,以便于对下限位块113进行抵接限位;所述固定限位块140的形状可以为圆弧形。由于移动限位组件110滑动设置在第一弧形通孔101中,因此可增大机器人旋转关节的转动范围。当第一弧形通孔101的圆弧角度为120
°
,固定限位块140的圆弧角度为20
°
,机器人旋转关节的转动范围可达到
±
230
°
,从而实现大范围的机械限位。
38.为便于对机器人旋转关节的转动范围进行调节,所述减速机安装板100上还可设置第一限位调节组件120和第二限位调节组件130,所述第一限位调节组件120和第二限位调节组件130分别位于第一弧形通孔101的两端。所述第一限位调节组件120和第二限位调节组件130的形状可以为圆弧形,所述第一限位调节组件120和第二限位调节组件130的圆弧角度可以为120
°
,从而使第一限位调节组件120的第一端和第二限位调节组件130的第一端相互靠拢,使第一限位调节组件120的第二端和第二限位调节组件130的第二端分别与第一弧形通孔101的两端相接。所述第一限位调节组件120上开设有一圆弧形的第二弧形通孔121,所述第二弧形通孔121的圆弧半径可以与第一弧形通孔101的圆弧半径相同。所述第一限位调节组件120上设置有至少一个第一调节组件固定螺栓122,本实施例中,优选为在第一限位调节组件120上设置两个第一调节组件固定螺栓122;所述第一调节组件固定螺栓
122的螺纹端穿过第二弧形通孔121并螺接在减速机安装板100上。所述第二限位调节组件130上开设有一圆弧形的第三弧形通孔131,所述第三弧形通孔131的圆弧半径可以与第一弧形通孔101的圆弧半径相同。所述第二限位调节组件130上设置有至少一个第二调节组件固定螺栓132,本实施例中,优选为在第二限位调节组件130上设置两个第二调节组件固定螺栓132;所述第二调节组件固定螺栓132的螺纹端穿过第三弧形通孔131并螺接在减速机安装板100上。第一调节组件固定螺栓122和第二调节组件固定螺栓132在减速机安装板100的螺接位置可以靠近第一弧形通孔101,以增大调节范围。需要调节旋转关节的转动范围时,先拧松第一调节组件固定螺栓122和第二调节组件固定螺栓132,然后使第一限位调节组件120和第二限位调节组件130分别沿第二弧形通孔121和第三弧形通孔131的方向转动,可以使第一限位调节组件120和第二限位调节组件130部分或全部封闭第一弧形通孔101的上孔口,通过调节移动限位组件110在第一弧形通孔101中的移动范围,可以对机器人旋转关节的转动范围进行调节;调节完毕再拧紧第一调节组件固定螺栓122和第二调节组件固定螺栓132即可。所述减速机安装板100的中部设置有环形的第一凸台102,所述第一限位调节组件120和第二限位调节组件130均位于第一凸台102的外侧,并在调节旋转关节的转动范围时围绕第一凸台102转动。
39.本实施例中,通过采用在减速机安装板100上开设第一弧形通孔101,并在第一弧形通孔101中设置移动限位组件110的方式,可以大幅增加机器人旋转关节的转动范围,实现大范围的机械限位;通过设置第一限位调节组件120和第二限位调节组件130,还可以对机器人旋转关节的机械限位范围进行调节,结构简单,使用方便,成本低。
40.如图4所示,本发明还公开了一种具有隐藏式大范围机械限位结构的机器人旋转关节,本发明一种具有隐藏式大范围机械限位结构的机器人旋转关节的一个优选实施例包括第一臂体310、第二臂体320、减速机以及上述的一种用于机器人旋转关节的隐藏式大范围机械限位结构。所述减速机包括第一减速机旋转组件210和转动设置在第一减速机旋转组件210上的第二减速机旋转组件220,所述第一减速机旋转组件210和第二减速机旋转组件220均为中空的环形结构,所述第一减速机旋转组件210的内侧设置有一圈环形的突起211,外侧设置有环形的第二凸台212,所述固定限位块140通过两个限位块固定螺栓141螺接固定在第二凸台212上;在所述第二凸台212和环形的突起211之间形成有环形槽213,所述第二减速机旋转组件220的第一端伸入环形槽213中,所述环形槽213中可设置轴承(图中未示出),所述第二减速机旋转组件220的第一端通过轴承与第一减速机旋转组件210转动连接。所述第二减速机旋转组件220的第二端冒出固定限位块140的上端面,并通过多个安装板固定螺栓103与减速机安装板100固定连接,且所述第一弧形通孔101的弧形的圆弧圆心位于减速机安装板100的转动轴线上。
41.所述第一臂体310和第二臂体320均呈筒状,所述第一臂体310的内壁上设置有一圈环状的第一凸沿311,所述第一减速机旋转组件210伸入第一臂体310中,所述第二凸台212通过多个第一臂体固定螺栓312固定连接在第一凸沿311上,两个限位块固定螺栓141也穿过第二凸台212螺接固定在第一凸沿311上,从而使第一减速机旋转组件210和第一臂体310固定连接。所述第二臂体320的内壁上设置有一圈环状的第二凸沿321,所述第二凸沿321通过多个第一臂体固定螺栓312与减速机安装板100及第二减速机旋转组件220固定连接。所述突起211的上端向上依次穿过第二减速机旋转组件220和减速机安装板100,并冒出
第二凸沿321的上端面,所述突起211、第一臂体310和第二臂体320围合后形成环形的空腔,所述第一减速机旋转组件210、第二减速机旋转组件220和隐藏式大范围机械限位结构均位于空腔中。
42.本实施例的工作原理如下:
43.如图5所示,当机器人旋转关节处于初始状态时,所述移动限位组件110位于第一弧形通孔101的中部,和所述固定限位块140位于第一限位调节组件120第一端和第二限位调节组件130第一端的下方,从而使移动限位组件110和固定限位块140相差180
°
。假设第一弧形通孔101的圆弧角度为120
°
,则移动限位组件110在第一弧形通孔101中沿顺时针方向和逆时针方向均可滑动60
°
;假设固定限位块140的圆弧角度为20
°
,则固定限位块140会使移动限位组件110在顺时针方向和逆时针方向均少转动10
°
。
44.如图6所示,当机器人旋转关节从初始状态开始顺时针转动时,减速机安装板100带动移动限位组件110沿顺时针方向转动,当转动角度达到+170
°
(即180
°‑
10
°
)时,移动限位组件110的下限位块113与固定限位块140抵接,阻止移动限位组件110继续转动,此时,由于第一弧形通孔101具有让位的作用,移动限位组件110可在第一弧形通孔101中滑动,减速机安装板100仍然能够沿顺时针方向继续转动60
°
。当减速机安装板100的转动角度达到+230
°
(即170
°
+60
°
)时,移动限位组件110滑动至第一弧形通孔101与第一限位调节组件120相接的一端,使移动限位组件110的上限位块112与第一限位调节组件120抵接,阻止减速机安装板100继续转动,从而对机器人旋转关节的顺时针转动角度进行机械限位,当未安装第一限位调节组件120时,移动限位组件110的连接螺栓与第一弧形通孔101端部的侧壁抵接,也能阻止减速机安装板100继续转动。
45.如图7所示,当机器人旋转关节从初始状态开始逆时针转动时,减速机安装板100带动移动限位组件110沿逆时针方向转动,当转动角度达到-170
°
时,移动限位组件110的下限位块113与固定限位块140抵接,阻止移动限位组件110继续转动,此时,由于第一弧形通孔101具有让位的作用,移动限位组件110可在第一弧形通孔101中滑动,减速机安装板100仍然能够沿逆时针方向继续转动-60
°
。当减速机安装板100的转动角度达到-230
°
时,移动限位组件110滑动至第一弧形通孔101与第二限位调节组件130相接的一端,使移动限位组件110的上限位块112与第二限位调节组件130抵接,阻止减速机安装板100继续转动,从而对机器人旋转关节的逆时针转动角度进行机械限位。
46.当需要缩小机器人旋转关节的顺时针转动范围时,可以拧松第一调节组件固定螺栓122,然后使第一限位调节组件120沿第二弧形通孔121的方向转动,可以使第一限位调节组件120部分封闭第一弧形通孔101的上孔口,从而减小移动限位组件110在第一弧形通孔101中的移动范围,可以对机器人旋转关节的最大顺时针转动角度进行调节;调节完毕再拧紧第一调节组件固定螺栓122即可。当需要缩小机器人旋转关节的逆时针转动范围时,可以拧松第二调节组件固定螺栓132,然后使第二限位调节组件130沿第三弧形通孔131的方向转动,并部分封闭第一弧形通孔101的上孔口,从而对机器人旋转关节的最大逆时针转动角度进行调节;调节完毕再拧紧第二调节组件固定螺栓132。当需要同时缩小机器人旋转关节的顺时针转动范围和逆时针转动范围时,按上述方法分别对第一限位调节组件120和第二限位调节组件130进行即可。
47.本实施例中,通过采用在减速机安装板100上开设第一弧形通孔101,并在第一弧
形通孔101中设置移动限位组件110的方式,可以大幅增加机器人旋转关节的转动范围,实现大范围的机械限位;移动限位组件110和固定限位块140即采用螺接的方式固定,在损坏时可单独更换移动限位组件110或固定限位块140,无需整体更换臂体,维修成本低。另外,本实施例将机械限位结构与减速机部件进行了集成,使得机械限位结构占用的空间大大缩小;且机械限位结构可完全隐藏于臂体之中无额外的突起,有利于机器人的美观。
48.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1