一种多位置电路板加工的机械臂控制方法与流程
1.本发明涉及智能控制技术领域,具体是一种多位置电路板加工的机械臂控制方法。
背景技术:
2.随着电子设备的快速发展及电子设备制作工艺的不断改善,电子设备向着小型化方向发展,随之而来的是,电子设备的零部件尺寸也越来越小,进而使得在电子设备内有限的空间中布置的零部件数量较多。很显然,这也使得电子设备内部的零部件装配也越来越难,零部件的装配失效风险逐渐增加,而且不利于后续零部件的拆卸和返工,为了提高电子设备零部件的加工的精准性,越来越多的用户会选择机械臂帮助电路板进行加工,但是现有的机械臂的使用不够灵活,降低加工效率,因此需要一种多位置电路板加工的机械臂控制方法。
3.中国专利公开了一种机械臂的控制方法及装置(授权公告号cn110293555a),该专利技术便于通过获取动作原子的目标动作,调用目标动作对应的执行函数,再获取所述动作原子参数的参数值,根据执行函数以及动作原子参数的参数值生成至少一个控制参数,最后根据控制参数控制机械臂完成动作,从而允许用户根据动作原子实现对机械臂的控制,操作灵活,易于普通用户使用,但是其对加工物料的追踪效果较弱,导致定位不够准确,容易机械臂的力度过大对物料造成损伤,并且机械臂运行的角度和空间运动位姿不够精准,降低加工效果。
技术实现要素:
4.本发明的目的在于提供一种多位置电路板加工的机械臂控制方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种多位置电路板加工的机械臂控制方法,步骤如下:
7.s1:利用识别机构获取电路板的位置信息,通过位置信息描述当前时刻的电路板位置相对于上一时刻的电路板位置的变化;
8.s2:再利用位置信息计算机械臂的目标位置,接着,利用驱动机构获取机械臂的目标驱动动作,其中,目标驱动动作包括机械臂运行轨迹信息和预设运行速度信息;
9.s3:接着,利用执行机构执行s2步骤中的目标驱动动作,其中,执行机构内部包括控制器,通过控制器使得机械臂以预设速度完成移动路径;
10.s4、利用控制器对机械臂夹爪内的压力传感器内的最高压力值和最低压力值进行预设,这时便可以通过机械臂对电路板执行拿取动作;
11.s5、通过执行机构带动机械臂沿着移动路径运动,通过控制器发出指令,执行机构给定旋转范围,完成机械臂的旋转周期,实现多位置加工。
12.作为本发明再进一步的方案:所述s1步骤中的位置信息利用pst光学定位进行检
测标记,其识别方法如下:先通过红外(ir)照明对电路板进行补光;再使用反光标记点或 irled标记点对电路板进行标记;再通过pst光学定位利用这些标记点来识别目标并重建其姿态。
13.作为本发明再进一步的方案:所述s1中的识别机构包括:视觉传感器和红外传感器,所述视觉传感器用于扫描电路板当前的位置区域,所述红外传感器用于识别机械臂和电路板之间的距离。
14.作为本发明再进一步的方案:所述s2中目标位置下的中心点相对于上一时刻的原中心电的相对位置相同,其中,目标位置的中心点即机械臂运行加工的中心点和电路板中心点之间的相对位置。
15.作为本发明再进一步的方案:所述机械臂由三个关节组成时,分别用x、y、z表示,其中,s2中机械臂运行轨迹信息,即机械臂的起始端到末端的各个关节的运动轨迹,并用坐标系表示,并用坐标系之间的关系来描述机械手臂的运动角度。
16.作为本发明再进一步的方案:所述坐标系可运用d-h法建立机械臂运动的坐标系,从机械臂的末端运动坐标系到基础坐标系建立矩阵;在机械臂的坐标系中,通过三个运动关节矩阵a、b、c表示,机械臂转动与移动角度用公式表示为:
[0017][0018]
其中,e为机械臂从关节一端到另一端的移动距离;f为机械臂旋转的角度;g为机械臂纵向移动的距离;h为机械臂纵向移动的角度;
[0019]
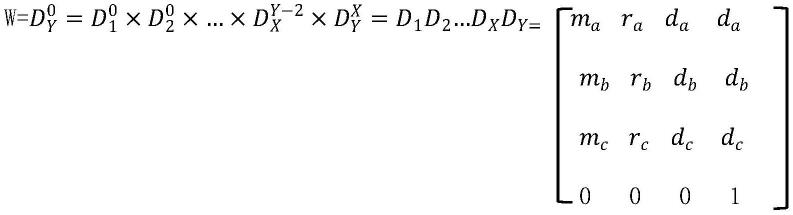
其中,机械臂的运动位姿用w表示,机械臂的起始端序号从0开始,用r表示坐标中心点,m表示关节连接杆的熟料,运动位姿用公式表示为:
[0020][0021]
结合机械臂某一时间点旋转角度变量为z,计算得出机械手臂末端的运动空间位姿,整个机械臂控制完成。
[0022]
作为本发明再进一步的方案:所述s2中通过机械臂运行轨迹信息和预设运行速度信息确定出目标移动控制参数信息,其中,目标移动控制参数信息用于指示机械臂进行运行速度的控制。
[0023]
作为本发明再进一步的方案:所述s4中压力传感器能够对机械臂的力度随时进行检测,当机械臂执行力度高于或者低于预设压力时,控制系统停止对机械臂的控制。
[0024]
作为本发明再进一步的方案:所述s5中执行机构给机械臂设定旋转范围为360
°
,机械臂的底部垂直水平面状态定义为原点,机械臂以原点为基点,正向旋转360
°
再反向旋转360
°
为一个运动周期。
[0025]
与现有技术相比,本发明的有益效果是:
[0026]
1、本发明通过利用pst光学定位进行检测标记,可以减少外部环境的可见光源的干扰,使用反光标记点,可以将任何物体变为追踪目标,提高对电路板的追踪效果,使得机
械臂能够快速准确的对电路板进行定位,提高机械臂加工的精确性,通过对机械臂转动与移动角度的计算,与运动空间位姿的计算,能够精准的对机械臂的运行进行控制,使用更加便捷,实现机械臂使用的智能化,大大提高了机械臂的加工效率,并且利用压力传感器,将压力传感器内的最高压力值和最低压力值进行预设,能够对机械臂的力度随时进行检测,当机械臂执行力度高于或者低于预设压力时,控制系统停止对机械臂的控制,避免压力过大对电路板造成伤害,提高电路板的加工质量。
具体实施方式
[0027]
本发明实施例中,一种多位置电路板加工的机械臂控制方法,步骤如下:
[0028]
s1:利用识别机构获取电路板的位置信息,通过位置信息描述当前时刻的电路板位置相对于上一时刻的电路板位置的变化;
[0029]
s2:再利用位置信息计算机械臂的目标位置,接着,利用驱动机构获取机械臂的目标驱动动作,其中,目标驱动动作包括机械臂运行轨迹信息和预设运行速度信息;
[0030]
s3:接着,利用执行机构执行s2步骤中的目标驱动动作,其中,执行机构内部包括控制器,通过控制器使得机械臂以预设速度完成移动路径;
[0031]
s4、利用控制器对机械臂夹爪内的压力传感器内的最高压力值和最低压力值进行预设,这时便可以通过机械臂对电路板执行拿取动作,通过设定最高压力值和最低压力值,可以保证电路板在拿取过程中不受损坏;
[0032]
s5、通过执行机构带动机械臂沿着移动路径运动,通过控制器发出指令,执行机构给定旋转范围,完成机械臂的旋转周期,实现多位置加工。
[0033]
优选的:s1步骤中的位置信息利用pst光学定位进行检测标记,其识别方法如下:先通过红外(ir)照明对电路板进行补光;再使用反光标记点或irled标记点对电路板进行标记;再通过pst光学定位利用这些标记点来识别目标并重建其姿态;通过红外(ir) 照明可以减少来自环境的可见光源的干扰,通过使用反光标记点可以将任何物体变为追踪目标。
[0034]
优选的:s1中的识别机构包括:视觉传感器和红外传感器,视觉传感器用于扫描电路板当前的位置区域,红外传感器用于识别机械臂和电路板之间的距离。
[0035]
优选的:s2中目标位置下的中心点相对于上一时刻的原中心电的相对位置相同,其中,目标位置的中心点即机械臂运行加工的中心点和电路板中心点之间的相对位置。
[0036]
优选的:机械臂由三个关节组成时,分别用x、y、z表示,其中,s2中机械臂运行轨迹信息,即机械臂的起始端到末端的各个关节的运动轨迹,并用坐标系表示,并用坐标系之间的关系来描述机械手臂的运动角度。
[0037]
优选的:坐标系可运用d-h法建立机械臂运动的坐标系,从机械臂的末端运动坐标系到基础坐标系建立矩阵;在机械臂的坐标系中,通过三个运动关节矩阵a、b、c表示,机械臂转动与移动角度用公式表示为:
[0038][0039]
其中,e为机械臂从关节一端到另一端的移动距离;f为机械臂旋转的角度;g为机械臂纵向移动的距离;h为机械臂纵向移动的角度;
[0040]
其中,机械臂的运动位姿用w表示,机械臂的起始端序号从0开始,用r表示坐标中
心点,m表示关节连接杆的熟料,运动位姿用公式表示为:
[0041][0042]
结合机械臂某一时间点旋转角度变量为z,计算得出机械手臂末端的运动空间位姿,整个机械臂控制完成。
[0043]
优选的:s2中通过机械臂运行轨迹信息和预设运行速度信息确定出目标移动控制参数信息,其中,目标移动控制参数信息用于指示机械臂进行运行速度的控制。
[0044]
优选的:s4中压力传感器能够对机械臂的力度随时进行检测,当机械臂执行力度高于或者低于预设压力时,控制系统停止对机械臂的控制。
[0045]
优选的:s5中执行机构给机械臂设定旋转范围为360
°
,机械臂的底部垂直水平面状态定义为原点,机械臂以原点为基点,正向旋转360
°
再反向旋转360
°
为一个运动周期。
[0046]
以上的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1