一种机械臂控制器设计方法
1.本发明属于机械臂控制领域,具体涉及一种机械臂控制器设计方法。
背景技术:
2.机械臂控制是机器人领域关键技术之一。机械臂的控制性能直接关系到机器人的控制精度,机器人作业水平。在一些薄、脆零件加工、抓取领域,对机械臂控制提出了更高要求。不仅要求机械臂力、位控制稳、快、准,更对响应过程的平稳性(抖振)提出了要求。
3.而机械臂是一个具有非线性、未建模、交叉耦合的复杂系统。虽然滑模控制方法广泛应用于非线性控制领域,但由于控制过程中频繁切换控制结构,控制器输出具有较大抖振现象。抖振会使电机处于频繁切换状态,加剧电机损耗;抖振会降低机械系统平稳性、舒适性、加剧机械部分磨损,同时也容易导致控制失稳,甚至控制系统崩溃,加剧机械部分磨损。
4.综合比例、积分、微分反馈的pid控制能够满足控制系统稳、快、准要求。当误差发生变化时,由于微分环节的作用,这一变化能得到迅速放大,加快系统反应。但是加快反应的同时,也加快了系统振动。同时,任何系统不可避免受到各种干扰。当输入受到干扰时,微分环节也能够放大干扰。可见,pid控制虽然能满足系统稳、快、准要求,但对于机械臂运动平稳性(减少抖振)尚有不足。
技术实现要素:
5.发明目的:为了克服上述不足,本发明提出一种机械臂控制器设计方法,满足机械臂稳、快、准以及运动平稳性要求,当系统输入受到干扰时,能够对干扰进行平滑,降低干扰对系统的影响。
6.技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种机械臂控制器设计方法,具体包括:
7.根据工件特征,建立机械手末端位置以及作用力关系;利用全身位置姿态控制得到各机械臂动力学模型;
8.设置机械臂采样间隔时间,根据全身姿态方程求解各采样时刻期望的关节角度;根据期望的角度,建立电机力矩变化方程;
9.根据动力学模型和电机力矩变化方程得到一步驱动力矩增量与期望的关节角度的关系表达式,根据该关系设计比例反馈、分数阶微分反馈的综合控制器;
10.将分数阶控制器离散化,并截取固定长度作为反馈控制器,实现机械臂控制,更新关节角度信息。
11.进一步的,设计比例反馈、分数阶微分反馈的综合控制器,具体如下:
12.首先,构建各机械臂动力学模型:
[0013][0014]
其中,t表示时间,q(t)表示t时刻的关节角度,和分别表示q(t)的一阶导
和二阶导,m(q(t))为正定惯性矩阵,为科里奥利、离心力矩阵,g(q(t))为重力力矩矩阵,τ(t),τd(t)分别为驱动力矩和干扰力矩;
[0015]
其次,建立电机力矩变化方程:
[0016]
δτ(t+dt)=τ(t+dt)-τ(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0017][0018]
其中dt为采样间隔时间,δτ(t+dt)为一步驱动力矩增量,q(t+dt)为t+dt时刻期望的关节角度;由相应的雅克比矩阵得到:
[0019]
m(q(t+dt))≈m(q(t))+m’(q(t))dt.
[0020][0021]
其中m’(q(t))表示m(q(t)的导数,表示的导数;
[0022]
最后,设计比例反馈、分数阶微分反馈的综合控制器u(t):
[0023][0024]
其中β表示分数阶微分阶次,表示q(t)的分数阶微分,其定义表达式为:
[0025][0026]
其中ξ为自变量。
[0027]
进一步的,建立离散分数阶微分表达式如下:
[0028][0029]
其中表示对圆整,表示离散分数阶微分;
[0030]
对公式(6)截取有限长度l∈n
+
,得到:
[0031][0032]
根据卷积运算性质,得到:
[0033][0034]
根据公式(8)计算权系数w(1)=1-β
,w(2)=2-β
,w(3)=3-β
,
…
,w(l)=l-β
,得到:
[0035][0036]
将式(9)代入控制器式(4),实现控制算法,实现机械臂控制,更新关节参数即关节
角度信息。
[0037]
有益效果:与现有技术相比,本发明的技术方案具有以下有益的技术效果:
[0038]
1、本发明提供了一种新的机械臂控制方法,同滑模控制相比,没有滑模控制的切换,减少了抖振。
[0039]
2、同pid控制相比,该方法可以使噪声得到平滑,能满足机械臂运动稳定性、快速性、准确性要求,同时也能满足机械臂运动平稳性要求。
[0040]
3、同分数阶pid控制相比,该方法采用固定长度的分数阶微分,计算复杂性不会随时间增加,不会增加计算机开销以及计算时延。
[0041]
4、该方法简单、有效,易于计算机实现。
附图说明
[0042]
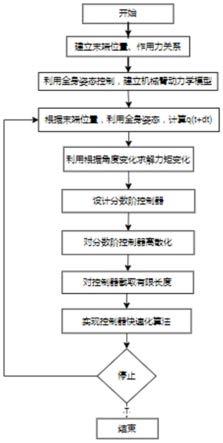
图1为本发明一种机械臂控制器设计方法流程图;
[0043]
图2为q1期望角度与输出角度误差随时间演化图;
[0044]
图3为q2期望角度与输出角度误差随时间演化图;
[0045]
图4为机械臂1角度q1随时间演化图;
[0046]
图5为机械臂2角度q1随时间演化图;
[0047]
图6为机械臂1控制器输入u1(t)随时间演化图;
[0048]
图7为机械臂2控制器输入u2(t)随时间演化图。
具体实施方式
[0049]
下面结合附图和实施例对本发明的技术方案作进一步的说明。
[0050]
本发明所述的一种机械臂控制器设计方法,流程如图1,包括以下步骤:
[0051]
步骤1:根据工件特征,建立机械手末端位置以及作用力关系。
[0052]
步骤2:利用全身位置姿态控制得到各机械臂动力学模型:
[0053][0054]
其中,t表示时间,q(t)表示t时刻的关节角度,和分别表示q(t)的一阶导和二阶导,m(q(t))为正定惯性矩阵,为科里奥利、离心力矩阵,g(q(t))为重力力矩矩阵,τ(t),τd(t)分别为驱动力矩和干扰力矩。
[0055]
步骤3:设机械臂采样间隔时间为dt,根据全身姿态方程,求解得到t+dt时刻期望的关节角度q(t+dt)。
[0056]
步骤4:根据期望的角度,建立电机力矩变化方程:
[0057]
δτ(t+dt)=τ(t+dt)-τ(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0058]
得到:
[0059][0060]
其中δτ(t+dt)为一步驱动力矩增量,可由相应的雅克比矩阵近似得到:
[0061]
m(q(t+dt))≈m(q(t))+m’(q(t))dt.
[0062][0063]
其中m’(q(t))表示m(q(t)的导数,表示的导数.
[0064]
步骤5:将公式整理,得到一步驱动力矩增量δτ(t+dt)与q(t+dt)的关系。根据该关系设计比例反馈、分数阶微分反馈的综合控制器:
[0065][0066]
其中β表示分数阶微分阶次,表示q(t)的分数阶微分,其定义表达式为:
[0067][0068]
其中ξ为自变量。
[0069]
步骤6:建立离散分数阶微分表达式:
[0070][0071]
其中表示对圆整,表示离散分数阶微分。
[0072]
步骤7:从公式(6)可以看出,随着时间增加,计算长度增加,且计算量随着时间增加呈几何级数增加。计算量增加必将增大计算机开销,增大计算延时。另一方面,随着时间推移,距离当前时间越久远的信息对于分数阶微分影响越小。因此,对公式(6)截取有限长度l∈n
+
:
[0073][0074]
步骤8:实现快速算法。根据卷积运算性质,
[0075][0076]
根据公式(8)计算权系数w(1)=1-β
,w(2)=2-β
,w(3)=3-β
,
…
,w(l)=l-β
,得到:
[0077][0078]
步骤9:将上式(9)代入控制器(4),实现控制算法,实现机械臂控制,更新关节参数即关节角度信息。
[0079]
本发明方法提供了一种机械臂分数阶控制器设计方法,将分数阶控制器离散化,并截取固定长度作为反馈控制器,并给出了快速实现方法。既能确保控制性能要求又能确保机械臂运动平稳性。快速算法能有效降低计算机开销,降低计算时延。
[0080]
在本实例中,对给出的控制算法进行了验证。期望的关键角轨迹为q1(t)=sin(3t-π),q2(t)=1.2sin(2t+π),机械臂1和机械臂2的长度均为1.2米,质量均为2千克,根据方程(1)为机械臂1和机械臂2建立力学方程。根据方程(4)设计控制器取β=0.6,k=300,在
方程(7)中取dt=0.001,l=1000并进行仿真。仿真结果如图2~图7所示。仿真结果表明:机械臂转角与期望角度误差收敛、机械臂角度变化平稳,控制器输入无频繁切换现象。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1