末端执行器、机器人以及末端执行器的控制方法与流程
1.本发明涉及末端执行器、机器人以及末端执行器的控制方法。
背景技术:
2.例如,专利文献1所记载的机械手控制装置具有分别检测施加于机械手的x轴、y轴、z轴的力的力觉传感器、以及分别在三轴方向上驱动机械手的三个致动器,通过使用来自该力觉传感器的信号驱动和控制三个致动器,可以进行精细的力控制,并且可以容易地进行避撞、按压力的恒定控制。
3.专利文献1:日本特开平6-226671号公报
4.然而,在专利文献1所记载的机械手控制装置中,由于在作为末端执行器的机械手上搭载有力觉传感器,因此存在难以实现机械手的轻量化的问题。
技术实现要素:
5.一种末端执行器,其特征在于,具备:连接部,连接于机械臂;作业部,对对象物进行作业;致动器,位于所述连接部与所述作业部之间,使所述作业部在所述连接部和所述作业部排列的第一方向上移动;以及压电元件,驱动所述致动器。
6.一种机器人,其特征在于,具有上述记载的末端执行器。
7.一种末端执行器的控制方法,其特征在于,所述末端执行器具备:连接部,连接于机械臂;作业部,对对象物进行作业;致动器,位于所述连接部与所述作业部之间,使所述作业部在所述连接部和所述作业部排列的第一方向上移动;以及压电元件,驱动所述致动器,所述末端执行器的控制方法以使所述致动器的按压力恒定的方式控制所述压电元件的驱动电压。
附图说明
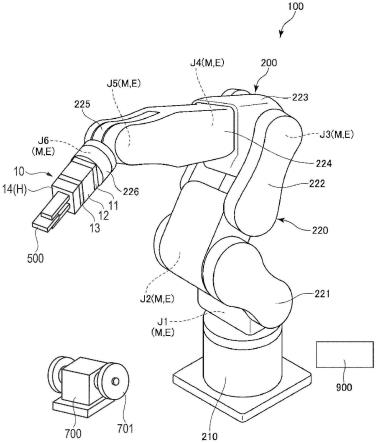
8.图1是表示具有第一实施方式所涉及的末端执行器的机器人系统的整体结构的立体图。
9.图2是表示第一实施方式所涉及的末端执行器的俯视图。
10.图3是表示第一实施方式所涉及的末端执行器的侧视图。
11.图4是图2中的a-a线剖视图。
12.图5是表示第一实施方式所涉及的末端执行器所具备的致动器的侧视图。
13.图6是表示末端执行器所具备的致动器的推力与速度相对于驱动电压的关系的图。
14.图7是表示末端执行器所具备的致动器在极低速时的驱动电压与推力的关系的图。
15.图8是表示第二实施方式所涉及的末端执行器的俯视图。
16.图9是图8中的b-b线剖视图。
17.图10是表示第三实施方式所涉及的末端执行器的俯视图。
18.图11是表示第三实施方式所涉及的末端执行器的侧视图。
19.附图标记说明
20.10、10a、10b
…
末端执行器;11
…
连接部;12
…
移动台;13
…
连结部;14
…
作业部;15
…
驱动部;16
…
夹持部;17
…
控制部;21
…
固定部;22
…
可动部;30
…
线性引导件;31
…
导轨;32
…
引导件;40
…
致动器;41
…
振动体;42
…
支承部;43
…
连接部;44
…
凸部;45、45a、45b、45c、45d、45e
…
压电元件;50
…
保护板;60
…
编码器;61
…
编码器芯片;62
…
编码器标尺;71
…
固定部;72
…
可动部;100
…
机器人系统;200
…
机器人;210
…
基座;220
…
机械臂;221、222、223、224、225、226
…
臂;500
…
对象物;700
…
加工装置;701
…
磨削磨具;900
…
机器人控制装置;e
…
编码器;h
…
手部;j1、j2、j3、j4、j5、j6
…
关节;m
…
电机。
具体实施方式
21.1.第一实施方式
22.首先,对于第一实施方式所涉及的末端执行器,以搭载于机器人系统的机器人的末端执行器为一例,参照图1至图5进行说明。
23.需要说明的是,为了便于说明,除图1、图6以及图7之外,在之后的各图中,图示了x轴、y轴以及z轴作为相互正交的三个轴。另外,将沿x轴的方向称为“x方向”,将沿y轴的方向称为“y方向”,将沿z轴的方向称为“z方向”。另外,各轴的箭头也侧称为“正侧”,与箭头相反的一侧也称为“负侧”。
24.图1所示的机器人系统100具有夹持对象物500的机器人200、控制机器人200的驱动的机器人控制装置900、以及例如对对象物500进行研磨加工的加工装置700。
25.机器人200是具有六个驱动轴的六轴机器人。机器人200具有固定于地面的基座210、连接于基座210的机械臂220、以及连接于机械臂220的末端执行器10。
26.另外,机械臂220是多个臂221、222、223、224、225、226转动自如地连结而成的机械式臂,具备六个关节j1至j6。其中,关节j2、j3、j5是弯曲关节,关节j1、j4、j6是扭转关节。另外,在关节j1、j2、j3、j4、j5、j6上分别设置有作为驱动源的电机m以及检测电机m的旋转量或臂的转动角的编码器e。
27.末端执行器10连接于机械臂220,更具体而言,连接于臂226的前端部。如图2和图3所示,末端执行器10具有与臂226连接的连接部11、使作业部14移动的移动台12、连接移动台12和作业部14的连结部13、以及夹持对象物500的作业部14。
28.移动台12位于连接部11与作业部14之间,使作业部14在连接部11和作业部14排列的第一方向即x方向上移动。移动台12具有固定于连接部11的固定部21、经由线性引导件30搭载于固定部21,并经由连结部13固定于作业部14的可动部22、以及控制可动部22的移动的控制部17。
29.如图4所示,在固定部21的与可动部22相对的面上,移动台12安装有构成用于使可动部22在x方向上顺畅地移动的线性引导件30的导轨31以及使可动部22移动的致动器40。另外,在可动部22的与固定部21相对的面上,安装有构成线性引导件30的引导件32以及保护可动部22不与致动器40接触的氧化铝等保护板50。
30.致动器40位于连接部11与作业部14之间,使与可动部22连结的作业部14在连接部
11和作业部14排列的第一方向即x方向上移动。如图5所示,致动器40具有振动体41、支承振动体41的支承部42、连接振动体41与支承部42的连接部43、设置于振动体41,将振动体41的振动传递至可动部22的保护板50的凸部44、以及使振动体41振动的压电元件45。另外,在振动体41上配置有驱动致动器40的五个压电元件45a至45e。这五个压电元件45a至45e的驱动由电压控制,具体而言,由从控制部17输出的驱动电压控制,分别在振动体41的长度方向即z方向上伸缩。因此,通过使压电元件45a至45e分别在规定的时刻伸缩,振动体41弯曲振动为s形,该弯曲振动经由凸部44传递至可动部22的保护板50,由此,能够使可动部22向x方向的正侧或负侧移动。
31.控制部17以按压力恒定的方式控制驱动电压,并通过将所控制的驱动电压施加于压电元件45来驱动致动器40。
32.作业部14具有驱动夹持部16的驱动部15以及夹持对象物500的夹持部16。驱动部15通过使夹持部16在y方向上可动来夹持对象物500。因此,本实施方式的作业部14是手部h。
33.在此,参照图6和图7,对末端执行器10的控制方法进行说明。
34.根据施加于压电元件45的驱动电压,利用压电元件45的伸缩的致动器40的推力和速度如图6所示变化。需要说明的是,推力是致动器40在x方向上按压作业部14的力即按压力,速度是致动器40使作业部14在x方向上移动的移动速度。
35.另外,在速度为零的极低速时,致动器40的推力为最大,致动器40的驱动电压与推力的关系如图7所示。
36.因此,末端执行器10的控制方法以使致动器40的按压力恒定的方式控制压电元件45的驱动电压。也就是说,如果确定了使对象物500与旋转的磨削磨具701抵接并进行研磨时的按压力即推力,则能够根据图7所示的驱动电压与推力的关系,确定与该推力相当的驱动电压,通过控制施加于压电元件45的驱动电压,能够使致动器40的按压力恒定。因此,能够高精度地对对象物500进行研磨加工。
37.对推力与速度相对于作业前的驱动电压的关系的校准进行说明。通过在重力方向上设置夹持规定重量的重物的末端执行器10,检测与规定重量的推力相平衡的驱动电压,并与存储于控制部17的存储器中的驱动电压与推力的关系进行比较,来校准相对于驱动电压的推力。另外,通过将末端执行器10设为不受重力影响的姿势即水平,在无负载状态下检测每个驱动电压的最大速度,并与存储于控制部17的存储器中的驱动电压与速度的关系进行比较,来校准相对于驱动电压的速度。
38.机器人控制装置900控制关节j1至j6和末端执行器10的驱动,使机器人200进行规定的作业。机器人控制装置900例如由计算机构成,具有处理信息的处理器(cpu)、可通信地与处理器连接的存储器、以及外部接口。另外,在存储器中保存有能够由处理器执行的各种程序,处理器能够读取并执行存储于存储器中的各种程序等。
39.加工装置700通过使对象物500抵接于旋转的磨削磨具701来对对象物500进行研磨加工。
40.需要说明的是,在本实施方式中,进行了将对象物500夹持于末端执行器10,并进行研磨加工的作业,但并不限于此,也可以是在末端执行器10安装旋转的磨削磨具701,并对对象物500进行研磨加工的作业。另外,作业并不限定于研磨加工,也可以是嵌合作业。
41.如上所述,本实施方式的末端执行器10通过控制驱动压电元件45的驱动电压而使致动器40的按压力恒定,因此与搭载有力觉传感器的末端执行器相比,能够实现轻量化。特别是,如果由压电元件45驱动的致动器40的重量与搭载有电磁电机的致动器的重量相同,则可以产生数倍的推力,因此可以实现大幅度的轻量化。
42.2.第二实施方式
43.接着,参照图8和图9,对第二实施方式所涉及的末端执行器10a进行说明。
44.本实施方式的末端执行器10a与第一实施方式的末端执行器10相比,除了移动台12a的结构不同以外,与第一实施方式的末端执行器10相同。需要说明的是,以与上述第一实施方式的不同点为中心进行说明,对相同的事项标注相同的附图标记并省略其说明。
45.如图8所示,末端执行器10a具有与臂226连接的连接部11、使作业部14移动的移动台12a、连接移动台12a和作业部14的连结部13、以及夹持对象物500的作业部14。
46.如图9所示,在固定部21的与可动部22相对的面上,移动台12a安装有构成用于使可动部22在x方向上顺畅地移动的线性引导件30的导轨31、使可动部22移动的致动器40、以及构成用于检测可动部22的位置、移动速度的编码器60的编码器芯片61。另外,在可动部22的与固定部21相对的面上,安装有构成线性引导件30的引导件32、保护可动部22不与致动器40接触的氧化铝等保护板50、以及构成编码器60的编码器标尺62。
47.控制部17根据来自编码器60的信号控制驱动电压,通过向压电元件45施加所控制的驱动电压来驱动致动器40。
48.末端执行器10a的控制方法根据来自编码器60的信号,以使致动器40的按压力恒定的方式控制压电元件45的驱动电压。
49.在使由作业部14夹持的对象物500与加工装置700的旋转的磨削磨具701抵接并进行研磨时,利用搭载于移动台12a的编码器60检测由作业部14夹持的对象物500的移动速度,并基于图6所示的关系,控制施加于压电元件45的驱动电压,以使推力由该速度限定,由此,能够使致动器40的按压力恒定。
50.通过这样的结构,即使磨削磨具701的旋转轴发生偏心、加工装置700发生振动,由于按压力恒定,因此也能够进一步提高对象物500的研磨加工精度。
51.3.第三实施方式
52.接着,参照图10和图11,对第三实施方式所涉及的末端执行器10b进行说明。
53.本实施方式的末端执行器10b与第一实施方式的末端执行器10相比,除了追加了移动台70以外,与第一实施方式的末端执行器10相同。需要说明的是,以与上述第一实施方式的不同点为中心进行说明,对相同的事项标注相同的附图标记并省略其说明。
54.如图10和图11所示,末端执行器10b具有与臂226连接的连接部11、使作业部14在第一方向即x方向上移动的移动台12、使作业部14在与第一方向正交的第二方向即z方向上移动的移动台70、连接移动台70和作业部14的连结部13、以及夹持对象物500的作业部14。移动台70位于连接部11与作业部14之间,在固定部71的与可动部72相对的面上,安装有使可动部72移动的致动器40。
55.移动台12和移动台70配置于连接部11与作业部14之间,移动台70的固定部71固定于移动台12的可动部22上。
56.控制部17控制移动台12的可动部22在x方向上移动。另外,控制部73控制移动台70
的可动部72在z方向上移动。
57.通过这样的结构,不仅能够在垂直于加工装置700的磨削磨具701的方向上按压对象物500,还能够利用双轴控制在倾斜方向上按压的力,并且能够进行倒角那样的角部的研磨。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1