机器人的控制方法、装置、设备及存储介质与流程
所属的技术人员能够理解,本发明的各个方面可以实现为系统、方法或程序产品。因此,本发明的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“平台”。此外,本技术实施例还提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,当用户设备的至少一个处理器执行该计算机执行指令时,用户设备执行上述各种可能的方法。其中,计算机可读介质包括计算机存储介质和通信介质,其中通信介质包括便于从一个地方向另一个地方传送计算机程序的任何介质。存储介质可以是通用或专用计算机能够存取的任何可用介质。一种示例性的存储介质耦合至处理器,从而使处理器能够从该存储介质读取信息,且可向该存储介质写入信息。当然,存储介质也可以是处理器的组成部分。处理器和存储介质可以位于asic中。另外,该asic可以位于用户设备中。当然,处理器和存储介质也可以作为分立组件存在于通信设备中。本技术还提供一种程序产品,程序产品包括计算机程序,计算机程序存储在可读存储介质中,服务器的至少一个处理器可以从可读存储介质读取计算机程序,至少一个处理器执行计算机程序使得服务器实施上述本发明实施例任一的方法。本领域普通技术人员可以理解:实现上述方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成,前述的程序可以存储于一计算机可读取存储介质中,该程序在执行时,执行包括上述方法实施例的步骤;而前述的存储介质包括:只读内存(read-onlymemory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。图13是本发明实施例中的计算机可读存储介质的结构示意图。参考图13所示,描述了根据本发明的实施方式的用于实现上述方法的程序产品1300,其可以采用便携式紧凑盘只读存储器(cd-rom)并包括程序代码,并可以在终端设备,例如个人电脑上运行。然而,本发明的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读信号介质或者可读存储介质。可读存储介质例如可以为但不限于电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。计算机可读存储介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了可读程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。可读存储介质还可以是可读存储介质以外的任何可读介质,该可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。可读存储介质上包含的程序代码可以用任何适当的介质传输,包括但不限于无线、有线、光缆、rf等等,或者上述的任意合适的组合。可以以一种或多种程序设计语言的任意组合来编写用于执行本发明操作的程序代码,程序设计语言包括面向对象的程序设计语言—诸如java、c++等,还包括常规的过程式程序设计语言—诸如“c”语言或类似的程序设计语言。程序代码可以完全地在用户计算设备上执行、部分地在用户设备上执行、作为一个独立的软件包执行、部分在用户计算设备上部分在远程计算设备上执行、或者完全在远程计算设备或服务器上执行。在涉及远程计算设备的情形中,远程计算设备可以通过任意种类的网络,包括局域网(lan)或广域网(wan),连接到用户计算设备,或者,可以连接到外部计算设备(例如利用因特网服务提供商来通过因特网连接)。本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
背景技术:
1、随着互联网技术的发展,电子商务也迎来井喷式的扩张,物流仓储、机场行李系统、医药药房以及现代化工厂等等都在越来越多地使用自动化的管理和分拣系统。例如采用智能设备来完成物品的拣选、搬运、分发等等。
2、目前,自动导引运输车(automated guided vehicle,agv)等的移动机器人已经被广泛应用于电商和物流业。此外,移动机器人在智能工厂内也逐步代替人工在车间内搬运物料。
3、但是,现有移动机器人的机械臂作业范围有限,不能适用于高度较高,物料量较大的拆码垛场景。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种机器人的控制方法、装置、设备及存储介质。
2、第一方面,本技术实施例提供一种机器人的控制方法,应用于移动机器人中,所述移动机器人包括至少一个升降机构,所述移动机器人的机械臂的底部与所述升降机构的顶部紧固连接,且所述移动机器人的机械臂上安装有视觉系统,所述方法包括:
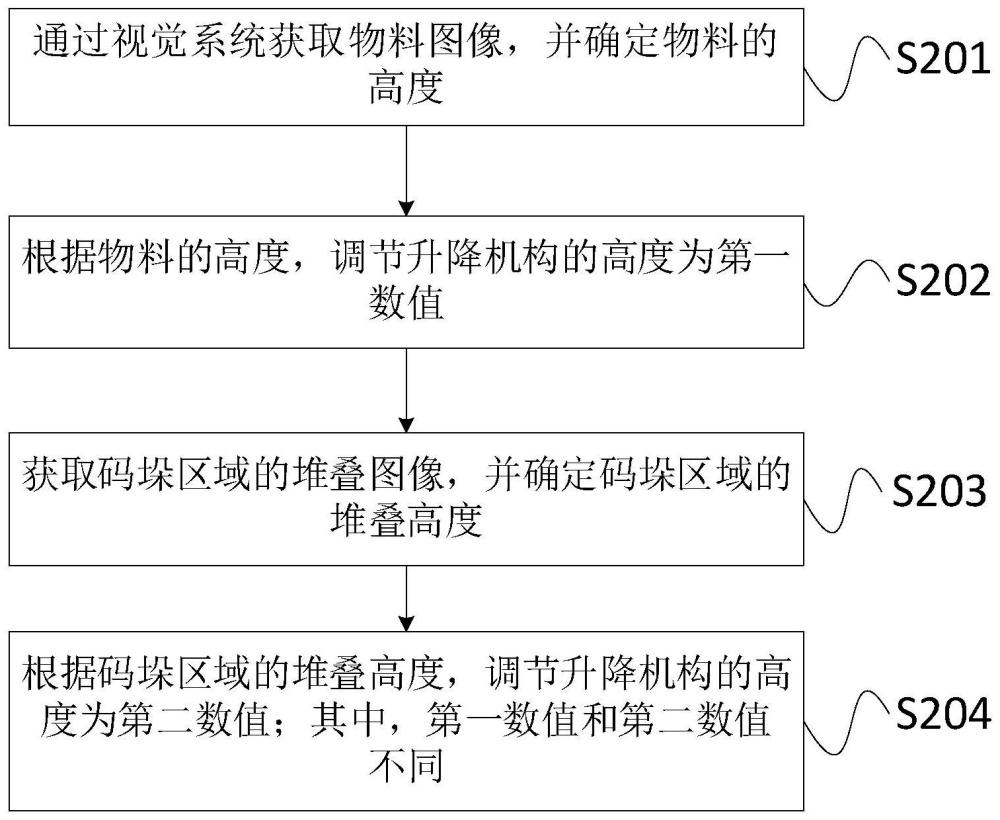
3、通过视觉系统获取物料图像,并确定物料的高度;
4、根据物料的高度,调节升降机构的高度为第一数值;
5、获取码垛区域的堆叠图像,并确定码垛区域的堆叠高度;
6、根据码垛区域的堆叠高度,调节升降机构的高度为第二数值;其中,所述第一数值和所述第二数值不同。
7、可选地,所述通过视觉系统获取物料图像,并确定物料的高度,包括:
8、所述移动机器人的机械臂在执行物料的放置任务时,调节所述视觉系统的驱动电机,以使得所述视觉系统朝向取料口,或者传送带;
9、获取取料口,或者传送带上物料的物料图像;
10、从所述物料图像中确定物料相对于参照平面的高度。
11、可选地,所述获取码垛区域的堆叠图像,并确定码垛区域的堆叠高度,包括:
12、所述移动机器人的机械臂在执行物料的抓取任务时,调节所述视觉系统的驱动电机,以使得所述视觉系统朝向码垛区域;
13、获取码垛区域的堆叠图像;
14、从所述码垛区域的堆叠图像中,确定堆叠区域顶部位置相对于参照平面的高度。
15、可选地,在根据物料的高度,调节升降机构的高度为第一数值之后,所述方法还包括:
16、获取物料的位置信息;
17、根据所述物料的位置信息,生成针对机械臂上各个关节的第一驱动指令;
18、根据所述第一驱动指令调整各个关节的旋转角度后,执行物料的抓取任务。
19、可选地,在根据码垛区域的堆叠高度,调节升降机构的高度为第二数值之后,所述方法还包括:
20、从码垛区域确定物料的至少一个放置位置;
21、根据所述放置位置,生成针对机械臂上各个关节的第二驱动指令;
22、根据所述第二驱动指令调整各个关节的旋转角度后,执行物料的放置任务。
23、可选地,所述方法还包括:
24、根据远程端发送的位置信息,和/或本地端中定位系统生成的位置信息,移动至预设区域,所述预设区域包括:取料口、货架、载物台、传送带。
25、可选地,所述方法还包括:
26、根据物料的高度,或者码垛区域的堆叠高度,调整视觉系统的拍摄角度。
27、第二方面,本技术实施例提供一种机器人的控制装置,应用于移动机器人中,所述移动机器人包括至少一个升降机构,所述移动机器人的机械臂的底部与所述升降机构的顶部紧固连接,且所述移动机器人的机械臂上安装有视觉系统,所述装置包括:
28、第一确定模块,用于通过视觉系统获取物料图像,并确定物料的高度;
29、第一调节模块,用于根据物料的高度,调节升降机构的高度为第一数值;
30、第二确定模块,用于获取码垛区域的堆叠图像,并确定码垛区域的堆叠高度;
31、第二调节模块,用于根据码垛区域的堆叠高度,调节升降机构的高度为第二数值;其中,所述第一数值和所述第二数值不同。
32、可选地,所述第一确定模块,具体用于:
33、所述移动机器人的机械臂在执行物料的放置任务时,调节所述视觉系统的驱动电机,以使得所述视觉系统朝向取料口,或者传送带;
34、获取取料口,或者传送带上物料的物料图像;
35、从所述物料图像中确定物料相对于参照平面的高度。
36、可选地,所述第二确定模块,具体用于:
37、所述移动机器人的机械臂在执行物料的抓取任务时,调节所述视觉系统的驱动电机,以使得所述视觉系统朝向码垛区域;
38、获取码垛区域的堆叠图像;
39、从所述码垛区域的堆叠图像中,确定堆叠区域顶部位置相对于参照平面的高度。
40、可选地,所述装置还包括:
41、定位模块,用于在根据物料的高度,调节升降机构的高度为第一数值之后,获取物料的位置信息;
42、处理模块,用于根据所述物料的位置信息,生成针对机械臂上各个关节的第一驱动指令;
43、执行模块,用于根据所述第一驱动指令调整各个关节的旋转角度后,执行物料的抓取任务。
44、可选地,定位模块,还用于在根据码垛区域的堆叠高度,调节升降机构的高度为第二数值之后,从码垛区域确定物料的至少一个放置位置;
45、处理模块,还用于根据所述放置位置,生成针对机械臂上各个关节的第二驱动指令;
46、执行模块,还用于根据所述第二驱动指令调整各个关节的旋转角度后,执行物料的放置任务。
47、可选地,所述装置还包括:驱动模块,用于根据远程端发送的位置信息,和/或本地端中定位系统生成的位置信息,移动至预设区域,所述预设区域包括:取料口、货架、载物台、传送带。
48、可选地,所述装置还包括:调整模块,用于根据物料的高度,或者码垛区域的堆叠高度,调整视觉系统的拍摄角度。
49、第三方面,本技术实施例提供一种机器人的控制设备,包括:处理器和存储器,所述存储器中存储有可执行的程序指令,所述处理器调用所述存储器中的程序指令时,所述处理器用于:
50、执行如第一方面中任一项所述的机器人的控制方法的步骤。
51、第四方面,本技术实施例提供一种机器人,包括:机器人本体、驱动系统、机械臂,所述机器人本体中设置有处理器和存储器,所述存储器中存储有可执行的程序指令,所述处理器调用所述存储器中的程序指令时,所述处理器用于控制所述驱动系统驱动所述机械臂实现如第一方面中任一项所述的机器人的控制方法的步骤。
52、第五方面,本技术实施例提供一种计算机可读存储介质,用于存储程序,所述程序被执行时实现如第一方面中任一项所述的机器人的控制方法的步骤。
53、第六方面,本技术实施例提供一种程序产品,所述程序产品包括计算机程序,所述计算机程序存储在可读存储介质中,机器人的至少一个处理器可以从所述可读存储介质读取所述计算机程序,所述至少一个处理器执行所述计算机程序使得机器人实施如第一方面机器人的控制方法。
54、与现有技术相比,本发明具有如下的有益效果:
55、本技术中通过视觉系统获取物料图像,并确定物料的高度;根据物料的高度,调节升降机构的高度为第一数值;获取码垛区域的堆叠图像,并确定码垛区域的堆叠高度;根据码垛区域的堆叠高度,调节升降机构的高度为第二数值;其中,所述第一数值和所述第二数值不同。从而能够根据实际作业场景的需求,自动调节机器人机械臂的适配高度,增加了机械臂的作业范围,提高了搬运效率。
- 还没有人留言评论。精彩留言会获得点赞!