机器手臂的虚拟工具点的视觉校正方法与流程
本发明涉及机器手臂,尤其涉及机器手臂的校正方法。
背景技术:
1、机器手臂的使用者可以依照实际需求,于法兰面上装设对应的工具,借此利用工具来实现抓取、加工或组装等作业。
2、一般来说,机器手臂具有机器手臂坐标系,法兰面具有法兰面坐标系,而虽然工具设置在法兰面上,但工具上的工具中心点(tool center point,tcp),例如爪尖,并不是在法兰面上。因此,在装设或更换了一个新的工具后,机器手臂的使用者需要对工具进行校正,以获得工具中心点相对于法兰面的姿态(orientation)及偏移量(offset)。在得知了所述姿态及偏移量后,机器手臂才能够对其上的工具进行精准的控制。
3、一般来说,各式的工具都会使用对应的治具来进行工具中心点的校正。例如,处理器可以控制机器手臂移动,并让工具中心点触碰治具上的特定位置,借此计算工具中心点相对于机器手臂坐标系的位置。
4、惟,部分的工具并不具有明确的工具中心点。例如,部分使用者会将相机作为工具设置在法兰面上,以利用相机结合机器手臂来实现光学检测程序。由于相机不具有实体的工具中心点,因此在相关技术的机器手臂中,将无法直接对相机进行有效的校正程序。
5、另一方面,若要于环境中增设额外的传感器来实现相机的校正程序,将会导致成本的增加,因而不受本领域技术人员的青睐。
技术实现思路
1、本发明的主要目的,在于提供一种机器手臂的虚拟工具点的视觉校正方法,可以不需要设置额外的传感器,而直接对设置在法兰面上的相机进行校正。
2、为了达成上述目的,所述机器手臂的虚拟工具点的视觉校正方法应用于具有一校正系统,该校正系统具有一机器手臂、一相机及一球体,其中该机器手臂的一端具有一法兰面并使用一机器手臂坐标系,并且该相机设置于该法兰面上并使用一相机坐标系。该视觉校正方法包括:
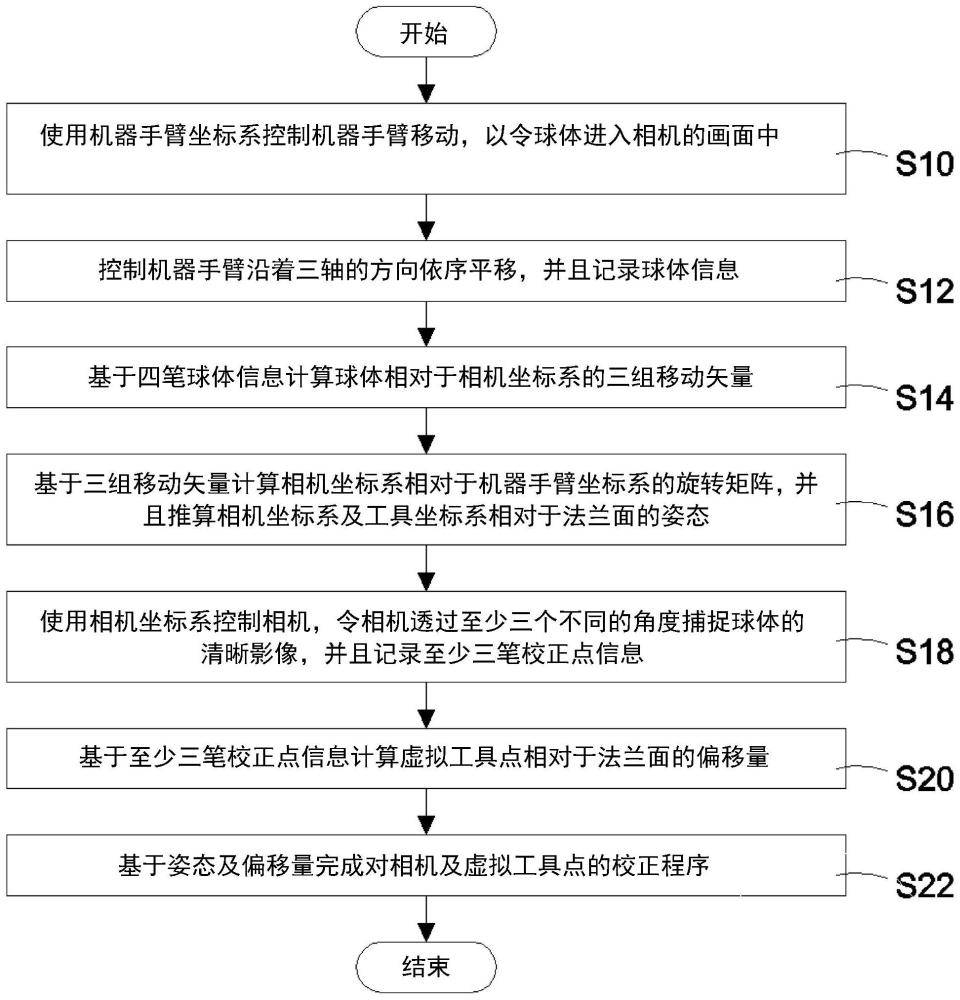
3、a)基于该机器手臂坐标系控制该机器手臂移动,以令该球体进入该相机的一画面中;
4、b)控制该机器手臂沿着三轴的方向依序进行平移,记录该球体的一球体信息,并基于该球体信息计算该球体相对于该相机坐标系的三组移动矢量;
5、c)基于该三组移动矢量计算该相机坐标系相对于该机器手臂坐标系的一旋转矩阵,并推算该相机坐标系相对于该法兰面的一姿态;
6、d)基于该机器手臂坐标系及该旋转矩阵来使用该相机坐标系,以控制该相机通过不同角度捕捉该球体的一清晰影像并且记录至少三笔校正点信息,其中该清晰影像是于该球体位于该相机前的一虚拟工具点上时被捕捉;
7、e)基于该至少三笔校正点信息计算该虚拟工具点相对于该法兰面的一偏移量;及
8、f)基于该姿态及该偏移量完成该相机的该虚拟工具点的一校正程序。
9、如上所述,其中该球体信息包括该球体于该相机坐标系上的一参考点位置,以及该球体于该画面中呈现的一直径。
10、如上所述,其中该步骤b)包括:
11、b1)控制该机器手臂移动以令该球体位于该画面中的一初始参考点,并记录该初始参考点于该相机坐标系上的一初始坐标以及该球体于该画面中的一初始直径;
12、b2)控制该机器手臂沿一x轴平移一第一指定矢量,以令该球体位于该画面中的一第一参考点,并记录该第一参考点于该相机坐标系上的一第一坐标以及该球体于该画面中的一第一直径;
13、b3)控制该机器手臂沿一y轴平移一第二指定矢量,以令该球体位于该画面中的一第二参考点,并记录该第二参考点于该相机坐标系上的一第二坐标以及该球体于该画面中的一第二直径;
14、b4)控制该机器手臂沿一z轴平移一第三指定矢量,以令该球体位于该画面中的一第三参考点,并记录该第三参考点于该相机坐标系上的一第三坐标以及该球体于该画面中的一第三直径;及
15、b5)依据该初始坐标、该第一坐标、该第二坐标、该第三坐标、该初始直径、该第一直径、该第二直径及该第三直径计算该三组移动矢量。
16、如上所述,其中于该步骤b5)包括依据该第一坐标及该初始坐标计算一第一移动矢量的一第一x轴分量及一第一y轴分量、依据该第二坐标及该初始坐标计算一第二移动矢量的一第二x轴分量及一第二y轴分量,并且依据该第三坐标及该初始坐标计算一第三移动矢量的一第三x轴分量及一第三y轴分量。
17、如上所述,其中该步骤b5)还包括透过一第一方程式、一第二方程式及一第三方程序计算该第一移动矢量的一第一z轴分量、该第二移动矢量的一第二z轴分量及该第三移动矢量的一第三z轴分量:
18、该第一方程式:c1c2=–a1a2–b1b2;
19、该第二方程式:c2c3=–a2a3–b2b3;
20、该第三方程序:c1c3=–a1a3–b1b3;
21、其中,a1为该第一x轴分量、a2为该第二x轴分量、a3为该第三x轴分量、b1为该第一y轴分量、b2为该第二y轴分量、b3为该第三y轴分量、c1为该第一z轴分量、c2为该第二z轴分量、c3为该第三z轴分量。
22、如上所述,其中该第一方程式、该第二方程式及该第三方程序共同获得两组该第一z轴分量、两组该第二z轴分量以及两组该第三z轴分量,该步骤b5)还包括透过该第一直径及该初始直径确定正确的该第一z轴分量、透过该第二直径及该初始直径确定正确的该第二z轴分量以及透过该第三直径及该初始直径确定正确的该第三z轴分量,其中该第一移动矢量由该第一x轴分量、该第一y轴分量及正确的该第一z轴分量组成,该第二移动矢量由该第二x轴分量、该第二y轴分量及正确的该第二z轴分量组成,该第三移动矢量由该第三x轴分量、该第三y轴分量及正确的该第三z轴分量组成。
23、如上所述,其中该步骤c)包括对该第一移动矢量、该第二移动矢量及该第三移动矢量进行正规化处理以将该第一移动矢量、该第二移动矢量及该第三移动矢量转成单位长度并产生该旋转矩阵。
24、如上所述,其中该步骤c)包括基于旋转矩阵以及该机器手臂坐标系至该法兰面的一机器人运动学(robot kinematics)关系推算该相机坐标系相对于该法兰面的该姿态。
25、如上所述,其中该步骤b3)是先控制该机器手臂移动以令该球体回到该初始参考点后,再控制该机器手臂沿该y轴平移该第二指定矢量的距离,并且该步骤b4)先控制该机器手臂移动以令该球体回到该初始参考点后,再控制该机器手臂沿该z轴平移该第三指定矢量的距离。
26、如上所述,其中该步骤d)包括:
27、d1)基于该相机坐标系控制该相机移动,以令该球体位于该画面上的一任意参考点;
28、d2)调整该相机相对于该球体间的距离,以令该球体清晰成像并于该画面中呈现该清晰影像;
29、d3)记录该球体的该校正点信息,其中该校正点信息包括该机器手臂的一当前姿态、该球体于该画面中的一坐标以及该球体于该画面中的一直径;
30、d4)于尚未取得至少三笔该校正点信息前,控制该机器手臂旋转或移动以令该相机以不同角度正对该球体,并且再次执行该步骤d1)至该步骤d3);及
31、d5)于取得至少三笔该校正点信息后,基于该至少三笔校正点信息计算该虚拟工具点相对于该法兰面的该偏移量。
32、本发明将相机安装至机器手臂上的任意位置以做为机器手臂的工具,并透过视觉方式来直接对相机进行校正。相较于相关技术,本发明在安装程序上不需要使用特定的安装治具,也不需要限制相机的安装位置及角度,提高了使用弹性及便利性。在校正程序上,本发明不需要使用额外的传感器来对相机进行校正,从而降低了校正成本。
33、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
- 还没有人留言评论。精彩留言会获得点赞!