一种空间机械臂关节运动范围设计方法与流程
1.本发明涉及空间机器人技术领域,特别涉及一种空间机械臂关节运动范围设计方法。
背景技术:
2.随着空间技术的飞速发展,空间机械臂作为空间机器人在轨支持、服务的一项关键性技术已经进入太空。随着空间机器人的能力越来越强,机械臂承担了跟踪抓捕、维护维修、接管、辅助对接等多任务,对机械臂提出了更高的要求。面对多任务需求和机械臂关节运动范围有限的问题,需在设计阶段开展任务仿真,确定机械臂关节运动范围,作为机械臂设计和加工的输入,确保机械臂的可达性和任务的可行性。
技术实现要素:
3.本发明的目的在于提供一种空间机械臂关节运动范围设计方法,通过机械臂任务仿真,分析关节运动轨迹,设计关节运动范围,从而降低了机械臂不可达的风险
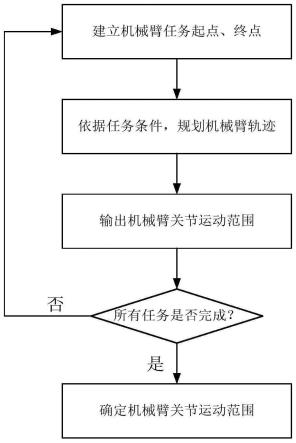
4.为了达到上述技术效果,本发明的技术方案是:提供一种空间机械臂关节运动范围设计方法,包括如下步骤:
5.s1、建立空间机器人的机械臂的任务起点和终点;
6.s2、依据任务条件,规划机械臂轨迹,输出机械臂关节运动范围;
7.s3、完成所有任务轨迹规划,确定机械臂关节运动范围;
8.其中,空间机器人由基座和机械臂组成;所述基座为多面体,机械臂安装在所述基座的侧面或顶面;所述机械臂由一系列刚体通过转动关节连接起来;同时定义机械臂的零位状态,各关节转动范围不超过θ,因此关节相对零位运动范围为[-θ
1 θ-θ1],其中θ表示机械臂关节可转动的运动范围,θ1代表相对零位沿关节转轴负方向允许转动的角度。
[0009]
进一步的,所述机械臂不超过7个自由度。
[0010]
进一步的,所述步骤s1中,所述机械臂的运动空间为基座的顶面、侧面和底面;
[0011]
所述任务起点位于基座的顶面、顶面、底面、侧面及附近;
[0012]
所述任务终点位于基座的顶面、底面、侧面及附近。
[0013]
进一步的,所述步骤s2中,所述任务条件为机械臂不与基座及其附件发生干涉、运动轨迹沿平面运动、直线运动中的一条或多条;其中:
[0014]
所述机械臂不与基座发生干涉适用于所有任务;
[0015]
所述运动轨迹沿平面运动为空间机器人与其他目标配合时的要求;
[0016]
所述直线运动用于1m内范围内的移动任务。
[0017]
进一步的,所述步骤s2中,假设机械臂各关节转动范围θ=360
°
,运动范围[-180
°ꢀ
180
°
],开展运动轨迹设计;为确保运动轨迹连续,不干涉,各关节运动范围按需调整为[-θ
1 360-θ1]。
[0018]
进一步的,所述步骤s3中,任务包括机械臂收拢在基座上、从基座上装卸载荷、抓
捕漂浮载荷、检视基座状态和将其他载荷停靠到基座上中的一项或多项。
[0019]
进一步的,所述步骤s3中,完成所有任务轨迹,在机械臂的零位基础上,确保轨迹连续,运动可达;选取关节运动范围交集,依据机械臂实际转动范围θr,调整关节运动范围到[-θ
st θ
et
],其中,θ
st
表示关节沿零位负方向可转动的角度,不大于360
°
;θ
et
表示关节沿零位正方向可转动的角度,不大于360
°
;满足θ
st
+θ
et
=θr,以此确定机械臂的关节运动范围。
[0020]
本发明提供的空间机械臂关节运动范围设计方法取得的有益效果是:
[0021]
本发明解决了多任务下机械臂关节运动范围的设计问题,提出了一种空间机械臂关节运动范围设计方法,降低了机械臂不可达的风险,保证空间机器人多任务可行性。本方法具有成本低,快捷方便,模拟效果逼真,使用范围广的特点,可广泛应用于空间机器人机械臂的任务仿真和设计。
附图说明
[0022]
下面结合附图对发明作进一步说明:
[0023]
图1是本发明实施例中所述的空间机器人示意图。
[0024]
图2是本发明实施例所述的一种空间机械臂关节运动范围设计方法流程图。
[0025]
图3是本发明实施例采用的修正denavit-hartenber法定义的7自由度机械臂。
[0026]
图4是本发明实施例中所述的机械臂末端沿平面运动要求末端轨迹示意图。
[0027]
图5是本发明实施例中所述的机械臂末端沿平面运动要求的关节轨迹。
[0028]
图6是本发明实施例中所述的机械臂末端沿平面运动要求的调整后关节轨迹。
[0029]
图7是本发明实施例中所述的机械臂典型任务的关节运动范围。
具体实施方式
[0030]
以下结合附图和具体实施例对本发明提出的空间机械臂关节运动范围设计方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0031]
本发明针对机械臂多任务需求和关节运动范围有限的问题,提供一种空间机械臂关节运动范围设计方法,通过机械臂任务仿真,分析关节运动轨迹,设计关节运动范围,从而降低了机械臂不可达的风险。
[0032]
实施例1
[0033]
本实施例中,参照图1,空间机器人由基座和一套7自由度机械臂组成,机械臂完成末端从基座顶面(+x)平面运动到基座底面(-x)任务。
[0034]
参照图2,一种空间机械臂关节运动范围设计方法,包括以下步骤:
[0035]
步骤1,建立空间机器人的机械臂任务起点和终点;
[0036]
步骤2,依据任务条件,规划机械臂轨迹,输出机械臂关节运动范围;
[0037]
步骤3,完成所有任务轨迹规划,确定机械臂关节运动范围;
[0038]
步骤1中,参照图1,空间机器人由基座、机械臂组成;所述基座一为四棱柱,机械臂安装在四棱柱侧面(-z方向);所述机械臂有7个自由度,用修正denavit-hartenber法描述,同时定义了机械臂的零位状态,参照图3,各关节转动范围不超过360
°
。在此基础上确定机
械臂的关节运动范围。
[0039]
步骤1中,机械臂执行从基座顶面(+x)平面运动到基座底面(-x)任务,起点为基座顶面(+x面),终点为基座底面(-x面);
[0040]
步骤2中,所述运动轨迹沿平面运动,即机械臂执行从基座顶面(+x)平面运动到基座底面(-x)任务,机械臂末端运动轨迹参照图4;在零位的基础上,基于机械臂7个关节转动范围θ=360
°
,运动范围[-180
°ꢀ
180
°
]的假设,开展设计11个轨迹点,各关节角度参照图5。考虑运动过程关节7转动方向唯一,将关节7的运动范围调整到[-300
°ꢀ
60
°
],其它关节运动范围不变,调整后关节轨迹参照图6.
[0041]
步骤3中,所述任务包括,机械臂收拢在基座上、从基座上装卸载荷、抓捕漂浮载荷、检视基座状态和将其他载荷停靠到基座上。所有的任务均按步骤2中的假设开展设计,确保轨迹连续,运动可达,关节运动范围参照图7。
[0042]
依据机械臂实际转动范围θr=350
°
:
[0043]
关节1运动范围调整到[-140
°ꢀ
210
°
];
[0044]
关节2运动范围调整到[-175
°ꢀ
175
°
];
[0045]
关节3运动范围调整到[-175
°ꢀ
175
°
];
[0046]
关节4运动范围调整到[-210
°ꢀ
140
°
];
[0047]
关节5运动范围调整到[-175
°ꢀ
175
°
];
[0048]
关节6运动范围调整到[-140
°ꢀ
210
°
];
[0049]
关节7运动范围调整到[-300
°ꢀ
50
°
]。
[0050]
通过任务仿真,确定机械臂关节运动范围,降低了机械臂不可达的风险,保证空间机器人多任务可行性。
[0051]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1