基于电动车门的智能随动系统、方法、车辆及存储介质与流程
1.本发明属于汽车智能控制技术领域,具体涉及一种基于电动车门的智能随动系统、方法、车辆及存储介质。
背景技术:
2.随着物联网、大数据、云计算、ai人工智能等新技术的快速发展,汽车智能化及网联化迎来前所未有的历史机遇及挑战,各大汽车厂商大力推进传统零部件全面向电智化转型升级,着力以人工智能及数字化为基础,围绕新汽车、新生态的使用场景,开展汽车关键零部件的通用化、模块化研究,打造知我、懂我的新汽车。
3.汽车车门系统作为整车重要功能执行端,为用户带来了更加直观的体验及服务,扮演着不可或缺的重要地位。目前,传统的车门开启或关闭过程主要依靠人为的动力作用来实现。例如,当用户从车内下车时,首先利用车门内饰板上内开门把手扳动实现车门解锁,紧接依靠外力作用将车门推开至一定角度后实现下车;又如当用户从车外上车时,首先也是需要通过双手实现车门解锁(遥控钥匙或车门外开门把手上peps按键),紧接用力将车门拉开至一定角度后再实现上车。整个车门开启或关闭的过程繁琐,全程需要用户手动参与,体验感极差。此外,对于部分特殊用车场景,如车辆停靠于斜坡或陡坡的路面时,用户在推开或关闭车门时,需要全程使用较大的力才能实现,且随着开启或关闭行程的增加,对应使用的力度会相应增大,用户常常苦不堪言。为了解决上述问题,部分车辆上搭载了基于电动车门的电吸/电开门系统及功能,其在一定程度上提升了车门的电智化,且解决了车门开启过程中的“第一段距离”的“拉拽”,及关闭过程中的“最后一段距离”的“加力关门”问题,但其仅仅针对开门“第一段”及关门“最后一段”,其余行程段仍无法摆脱用户手动操作的现实,且车辆停靠于斜坡或陡坡的路面仍需要用户一直加大力度打开或关闭车门,现状问题无法得到有效改善。
4.如专利文献cn201720292395.6公开的一种电动车门检测装置,包括为车门开关提供动力的电机,以及驱动电机转动的电机驱动电路,还包括:设于电机的主轴上,磁体分多个区域且各个区域磁体的南北极依次交替的永磁体;设于永磁体对应位置,检测磁力变化并转换输出对应电信号的第一霍尔传感器及第二霍尔传感器;第一霍尔传感器及第二霍尔传感器电连接,根据对应电信号计算出车门的运动方向及位置的处理器。本电动车门检测装置主要采用霍尔传感器检测电机主轴上永磁体转动方向及转动位置,记录相应的方波信号,并基于方波个数实现精确检测电动车门位置及运动方向,实施智能控制。然而基于霍尔传感器的原理及特性,系统需增设对应的磁环(磁环设置于驱动电机主轴上,用于检测磁体南北极依次交替产生的信号)、霍尔传感器、每个电动车门对应的处理控制器及连接线束等,但电动车门检测装置搭载成本相对较高。
5.因此,有必要开发一种新的基于电动车门的智能随动系统、方法、车辆及存储介质。
技术实现要素:
6.本发明的目的在于提供一种基于电动车门的智能随动系统、方法、车辆及存储介质,能实现“中间一段”的智能随动,以解决用户全程需手动推开/关闭车门时烦恼,同时能解决车辆停靠于斜坡或陡坡的路面时需要全程加大力度开启或关闭车门的痛苦。
7.第一方面,本发明所述的一种基于电动车门的随动系统,车门系统模块,用于实现车门的随动开启或关闭;车门移动距离检测模块,用于识别车门在开启或关闭过程中沿着运动轨迹移动的距离;速度检测模块,用于检测车门在开启或关闭过程中沿着运动轨迹移动的速度;控制器模块,用于接收车门在开启或关闭过程中沿着运动轨迹移动的速度及距离,以及响应于车门移动速度大于等于预设速度阈值且车门移动距离大于等于预设距离阈值时输出随动指令;电驱动器模块,其包括分别安装于各车门和车身之间的电驱动器,用于接收控制器模块输出随动指令信息,并基于随动指令信息驱动车门系统模块执行随动开启或关闭操作;所述车门移动距离检测模块、速度检测模块、电驱动器模块分别与控制器模块电连接,电驱动器模块与车门系统模块电连接。
8.可选地,所述车门移动距离检测模块包括:分别涂覆于各车门电机主轴上的感光涂层;以及分别与各感光涂层一一对应设置的光感传感器,用于识别感应与之对应的感光涂层;所述控制器模块接收车门在开启或关闭过程中沿着运动轨迹移动的速度信息及光感传感器发送的涂层感应的个数信息,并根据涂层感应的个数信息计算出车门移动距离,以及响应于车门移动速度大于等于预设速度阈值且车门移动距离大于等于预设距离阈值时输出随动指令;采用感光涂层和光感传感器相配合来检测车门的移动距离,具有成本低的优点。
9.可选地,所述速度检测模块包括分别布置于各车门门锁内的速度传感器,各速度传感器分别与控制器模块连接。
10.可选地,还包括:障碍物感应模块,包括分别安装于各车门上的障碍物感应单元,所述障碍物感应单元用于在车门为打开状态时感应对应车门的运动轨迹内的障碍物,并基于感应到的障碍物信息生成第一随动停止信号并发送给控制器模块,所述控制器模块基于第一随动停止信号关闭对应的电驱动器模块,各车内障碍物感应单元与控制器模块电连接。在车门随动开启或关闭过程中,本发明通过障碍物感应模块感应车门运动轨迹内的障碍物,在感应到障碍物后经过控制器模块关闭电驱动器模块,从而避免车门与障碍物发生碰撞。
11.可选地,还包括:过载电流检测模块,包括分别安装于各电驱动器模块中的过载电流检测单元,所述过载电流检测单元用于实时监测对应电驱动器模块的过载电流,并在监测到所述过载电流后生成第二随动停止信号并发送给控制器模块,所述控制器模块基于第二随动停止信号
关闭对应的电驱动器模块,各过载电流检测单元分别与控制器模块电连接;本发明通过过载电流检测单元实时监测对应电驱动器的过载电流,在监测到对应的电驱动器产生过载电流,即代表车门受到车门开启或关闭因外力受阻,关闭电驱动器模块以形成智能防夹防撞功能。
12.可选地,所述速度检测模块、车门移动距离检测模块、控制器模块分别通过整车can总线进行通信连接。本发明由整车can网络统一传输,节省了相关的线束成本。
13.可选地,所述控制器模块采用车身域控制器;减少了至少3个控制器的成本,大大地节约了搭载成本。
14.第二方面,本发明所述的一种基于电动车门的随动方法,采用如本发明所述的基于电动车门的随动系统,其方法包括以下步骤:在车门沿着运动轨迹打开或关闭过程中,实时获取车门的移动速度和移动距离;响应于检测到车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,输出随动指令;响应于车门处于开启过程中,则基于随动指令驱动车门系统模块执行随动开启车门操作;或响应于车门处于关闭过程中,则基于随动指令驱动车门系统模块执行随动关闭车门操作。
15.第三方面,本发明所述的一种基于电动车门的随动方法,采用如本发明所述的基于电动车门的随动系统,其方法包括以下步骤:在车门沿着运动轨迹打开或关闭过程中,实时获取车门的移动速度和移动距离;响应于检测到车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,输出随动指令;响应于车门处于开启过程中,则基于随动指令驱动车门系统模块执行随动开启车门操作;或响应于车门处于关闭过程中,则基于随动指令驱动车门系统模块执行随动关闭车门操作;在执行随动开启车门操作或随动关闭车门操作过程中,响应于感应到车门的运动轨迹内有障碍物时,基于感应到的障碍物信息发出第一随动停止信号;响应于电驱动器模块接收到第一随动停止信号时,关闭车门随动功能。
16.可选地,还包括:在执行随动开启车门操作或随动关闭车门操作过程中,实时检测电驱动器模块的电流;响应于检测到电驱动器模块发生过载电流时发出第二随动停止信号;响应于电驱动器模块接收到第二随动停止信号时,关闭车门随动功能。
17.第四方面,本发明所述的一种车辆,采用如本发明所述的基于电动车门的随动系统。
18.第五方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本发明所述的基于电动车门的随动方法的步骤。
19.本发明具有以下优点:
(1)从整体/宏观角度来看:解决了车门系统沿着弧形轨迹开启或关闭过程中全程需手动推开或关闭车门时烦恼,一旦随动系统开启,用户不再需要手动一直操作。对于一些如斜坡或陡坡的路面停车场景,解决了用户需要一直使用较大的力度实现车门的开启或关闭的情况,本发明仅于开始阶段需要使用一定力度,一旦随动系统开启,车门将自动实现开启或关闭本发明能够与当前部分电动车门的自吸锁功能相结合,打造出完整的智能车门开启或关闭的高体验感,提升车辆的综合品质,并与传统零部件电智化转型升级的趋势保持一致。
20.(2)从微观角度来看:本发明从搭载成本上具有较大的优势,相对于现有技术中采用的霍尔传感器工作原理及特性来看,需于在电机主轴上配置4个感应磁环,同时需每个车门搭配对应的处理控制器及线束,而本发明所采用的是于电机主轴上涂覆感应涂层(几乎无成本),同时四个车门的光感传感器信号指令由整车can网络统一传输(节省了相关的线束成本),并且信号处理控制器集成至整车车身域控制器bcm中(减少了至少3个控制器的成本),大大的节约了搭载成本。本发明通过车门沿着运动轨迹开启或关闭过程中车门板移动的速度及移动距离两项必要条件来综合判定,随动功能开启条件的精确性得到大大提高,误触发性大大降低。
21.综上所述,本发明减少了用户在对车门开启或关闭过程中,实现“中间一段”的智能随动,解决了用户全程需手动推开/关闭车门时烦恼,同时解决了车辆停靠于斜坡或陡坡的路面时需要全程加大力度开启或关闭车门的痛苦,并结合车门电吸/电开功能,打造完整的车门开启或关闭智能化全新体验,提升了电动车门的感知品质,让用户真实感受到科技给我们带来的便利。
附图说明
22.图1为本实施例一的原理框图;图2为本实施例一的流程图;图3为本实施例二的原理框图;图4为本实施例三的原理框图。
具体实施方式
23.以下将结合附图对本发明进行详细的说明。
24.实施例一如图1所示,本实施例中,一种基于电动车门的随动系统,包括车门系统模块、车门移动距离检测模块、速度检测模块、控制器模块和电驱动器模块。其中,车门系统模块用于实现车门的随动开启或关闭。车门移动距离检测模块用于识别车门在开启或关闭过程中沿着运动轨迹移动的距离。速度检测模块用于检测车门在开启或关闭过程中沿着运动轨迹移动的速度。控制器模块用于接收车门在开启或关闭过程中沿着运动轨迹移动的速度及距离,以及响应于车门移动速度大于等于预设速度阈值且车门移动距离大于等于预设距离阈值时输出随动指令。电驱动器模块包括分别安装于各车门和车身之间的电驱动器,用于接收控制器模块输出随动指令信息,并基于随动指令信息驱动车门系统模块执行随动开启或关闭操作。所述车门移动距离检测模块、速度检测模块、电驱动器模块分别与控制器模块电
连接,电驱动器模块与车门系统模块电连接。其中,电驱动器模块的各电驱动器分别与控制器模块连接,各电驱动器与各车门系统模块一一对应连接。
25.本实施例中,所述车门移动距离检测模块包括:分别涂覆于各车门电机主轴上的感光涂层,用于实现电机转动圈数可识别感应;以及分别与各感光涂层一一对应设置的光感传感器,用于识别感应与之对应的感光涂层。
26.本实施例中,控制器模块接收车门在开启或关闭过程中沿着运动轨迹移动的速度信息及光感传感器发送的涂层感应的个数信息,并根据涂层感应的个数信息计算出车门移动距离,以及响应于车门移动速度大于等于预设速度阈值且车门移动距离大于等于预设距离阈值时输出随动指令。
27.本实施例中,采用感光涂层和光感传感器相配合来检测电机转动圈数,从而计算出车门移动距离。与现有采用霍尔传感器来检测电机的转速(需在电机主轴上配置4个感应磁环,同时需每个车门搭配对应的处理控制器及线束,其成本较高)方案相比,采用感光涂层和光感传感器相配合的方式的成本较低,可忽略不计。
28.本实施例中,对于带有陀螺仪的车门,可通过陀螺仪检测的加速度来计算出车门移动的速度。对于不具有陀螺仪的车门,通过增设速度检测模块来检测车门的移动速度。所述速度检测模块包括分别布置于各车门门锁内的速度传感器,各速度传感器分别与控制器模块连接。
29.本实施例中,所述速度检测模块、车门移动距离检测模块和控制器模块分别通过整车can总线进行通信连接。由整车can网络统一传输,节省了相关的线束成本。
30.本实施例中,所述控制器模块采用车身域控制器;相对于现有技术,能够减少至少3个控制器的成本,大大节约了本系统的搭载成本。
31.本实施例中,当整车包含左前、右前、左后、右后四扇车门时,每个车门均有电驱动器,每个车门的电机主轴上均需要设置感光涂层。每个感光涂层需要对应设置一个光感传感器。
32.本实施例中,一种基于电动车门的随动方法,采用如本实施例一中所述的基于电动车门的随动系统,其方法包括以下步骤:在车门沿着运动轨迹打开或关闭过程中,实时获取车门的移动速度和移动距离;响应于检测到车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,输出随动指令;响应于车门处于开启过程中,则基于随动指令驱动车门系统模块执行随动开启车门操作;或响应于车门处于关闭过程中,则基于随动指令驱动车门系统模块执行随动关闭车门操作。
33.本方法通过车门沿着运动轨迹开启或关闭过程中,根据车门的移动速度及移动距离这两项必要条件来综合判定是否开启随动功能,即在车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,才会开启车门随动功能。相对于仅采用速度来判定是否开启随动功能(此种方式具有误触发率较高的问题),本方法大大提高了随动功能开启条件的精确性,从而降低了误触发率。
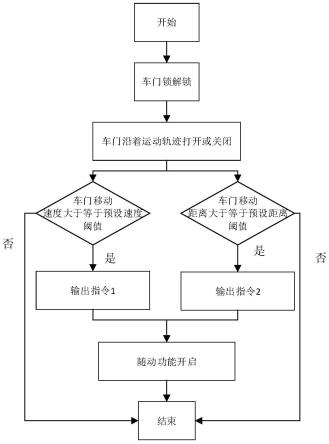
34.如图2所示,一种基于电动车门的随动方法,具体执行步骤如下:
步骤1,自车门解锁始,车门沿着运动轨迹实现开启或关闭;步骤2,感光涂层随着电机主轴一起转动;步骤3,光感传感器实时检测与之对应的感光涂层,并将检测到的信号发送至整车can网络;步骤4,速度传感器实时检测车门开启或关闭的移动速度,并将检测到信号发送至整车can网络;步骤5,当车门的移动速度大于等于预设速度阈值,即输出指令1,当车门的移动距离大于等于预设距离阈值时,输出指令2;步骤6,当控制器模块接收到指令1和指令2时,车门随动功能开启,否者不开启车门随动功能,流程结束。
35.本实施例中,通过光感传感器识别的信号个数达到预设信号个数,即表示移动距离大于等于预设距离阈值,则对应存储条件指令1,此时表明车门沿着运动轨迹移动的距离达到随动功能开启的条件之一。若车门沿着运动轨迹移动速度的指令信息达到预设速度阈值,则对应存储条件指令2,则表明车门沿着运动轨迹移动的速度达到随动功能开启的条件之二。当控制器模块同时获取随动功能开启的指令1和指令2时,系统将自动向对应的电驱动器输出随动功能开启的指令信息。
36.本实施例中,一种车辆,采用如本实施例一中所述的基于电动车门的随动系统。
37.本实施例中,一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本实施例一中所述的基于电动车门的随动方法的步骤。
38.实施例二如图3所示,本实施例中,一种基于电动车门的随动系统,还包括障碍物感应模块,其包括分别安装于各车门上的障碍物感应单元,所述障碍物感应单元用于在车门为打开状态时感应对应车门的运动轨迹内的障碍物,并基于感应到的障碍物信息生成第一随动停止信号并发送给控制器模块,所述控制器模块基于第一随动停止信号关闭对应的电驱动器模块,各车内障碍物感应单元与控制器模块电连接。
39.本实施例中,障碍物感应单元的数量跟车门的数量一致,在车门随动开启或关闭过程中,通过障碍物感应模块感应车门运动轨迹内的障碍物,在感应到障碍物后经过控制器模块关闭电驱动器模块,从而避免车门与障碍物发生碰撞。
40.本实施例中,障碍物感应模块采用超声波测距传感器。
41.本实施例中,一种基于电动车门的随动方法,采用如本实施例二中所述的基于电动车门的随动系统,其方法包括以下步骤:在车门沿着运动轨迹打开或关闭过程中,实时获取车门的移动速度和移动距离;响应于检测到车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,输出随动指令;响应于车门处于开启过程中,则基于随动指令驱动车门系统模块执行随动开启车门操作;或响应于车门处于关闭过程中,则基于随动指令驱动车门系统模块执行随动关闭车门操作;在执行随动开启车门操作或随动关闭车门操作过程中,响应于感应到车门的运动
轨迹内有障碍物时,基于感应到的障碍物信息发出第一随动停止信号;响应于电驱动器模块接收到第一随动停止信号时,关闭车门随动功能。
42.本实施例中,一种车辆,采用如本实施例二中所述的基于电动车门的随动系统。
43.本实施例中,一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本实施例二中所述的基于电动车门的随动方法的步骤。
44.其余部分与实施例一相同。
45.实施例三如图4所示,本实施例中,一种基于电动车门的随动系统,还包括过载电流检测模块,其包括分别安装于各电驱动器模块中的过载电流检测单元,所述过载电流检测单元用于实时监测对应电驱动器模块的过载电流,并在监测到所述过载电流后生成第二随动停止信号并发送给控制器模块,所述控制器模块基于第二随动停止信号关闭对应的电驱动器模块,各过载电流检测单元分别与控制器模块电连接。
46.本实施例中,过载电流检测单元与电驱动器的数量一致,通过过载电流检测单元实时监测对应的电驱动器的过载电流,在监测到电驱动器产生过载电流,即代表车门受到车门开启或关闭因外力受阻,关闭电驱动器模块以形成智能防夹防撞功能。
47.本实施例中,电驱动器包括驱动控制部分和驱动电机。
48.本实施例中,过载电流检测模块包括电流采集单元、单片机和发送单元。电流采集单元安装于驱动电机上,用于检测驱动机构的实时电流,当实时电流超过预设恒定电流时,单片机产生第二车门停止信号关闭,发送单元将第二车门停止信号关闭对外发送。电流采集单元可以是电流变送器,亦可是电流检测模块。
49.本实施例中,一种基于电动车门的随动方法,采用如本实施例三中所述的基于电动车门的随动系统,其方法包括以下步骤:在车门沿着运动轨迹打开或关闭过程中,实时获取车门的移动速度和移动距离;响应于检测到车门的移动速度大于等于预设速度阈值,且移动距离大于等于预设距离阈值时,输出随动指令;响应于车门处于开启过程中,则基于随动指令驱动车门系统模块执行随动开启车门操作;或响应于车门处于关闭过程中,则基于随动指令驱动车门系统模块执行随动关闭车门操作;在执行随动开启车门操作或随动关闭车门操作过程中,响应于感应到车门的运动轨迹内有障碍物时,基于感应到的障碍物信息发出第一随动停止信号;响应于电驱动器模块接收到第一随动停止信号时,关闭车门随动功能。
50.在执行随动开启车门操作或随动关闭车门操作过程中,实时检测电驱动器模块的电流;响应于检测到电驱动器模块发生过载电流时发出第二随动停止信号;响应于电驱动器模块接收到第二随动停止信号时,关闭车门随动功能。
51.本实施例中,一种车辆,采用如本实施例三中所述的基于电动车门的随动系统。
52.本实施例中,一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时能执行如本实施例三中所述的基于电动车门的随动方法的步骤。
53.其余部分与实施例二相同。
54.需要说明的是,本实施例一至实施例三所示的存储介质可以是计算机可读信号介质或者计算机可读存储介质或者是上述两者的任意组合。计算机可读存储介质例如可以是电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子可以包括但不限于:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机访问存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(erasable programmable read only memory,eprom)、闪存、光纤、便携式紧凑磁盘只读存储器(compact disc read-only memory,cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本实施例中,计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的计算机程序。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。计算机可读介质上包含的计算机程序可以用任何适当的介质传输,包括但不限于:无线、有线等等,或者上述的任意合适的组合。
55.附图中的流程图和框图,图示了按照本技术各种实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。其中,流程图或框图中的每个方框可以代表一个模块、程序段、或代码的一部分,上述模块、程序段、或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图或流程图中的每个方框、以及框图或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
56.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1