一种用于取酒醅的悬吊式冗余驱动机器人
1.本发明属于白酒酿制设备技术领域,具体涉及一种用于取酒醅的悬吊式冗余驱动机器人。
背景技术:
2.白酒的风味来源于其特有的固态发酵与固态蒸馏的工艺,其中清香型白酒以特有的“清蒸二次清”,地缸发酵闻名于世。发酵原料,即“酒醅”贮存在陶缸中发酵,待发酵周期结束后,需要从中取出转移至蒸馏工序。传统的取料方式往往是工人手持锨具铲出,这种方式很耗费人力且工作效率不高,酒缸布置的紧凑也给手推车运料带来诸多不便。为提升产能,以机器取料、卸料、上料,逐步替代人力成为主流趋势。
3.对于取酒醅装置的设计,cn201811255861.9公示了地面上万向轮车与挖斗升降、平移装置相结合的方案,万向轮车定位后一次取两口缸,再取其他缸时需要其移动往返数次,且需附带推车运料卸料,同时整体占据空间大,且对地下陶缸产生负载。cn202123128310.6公示了将agv车与六自由度机器人相结合的方案,但占地空间大,行车空间有限,对工作空间要求高。考虑到节省地面空间,酒企车间也使用天车抱斗抓取醅料,取酒效率高,但这种方式对每一次取料都需要重新指定抱斗位置,行车往返次数过多。
技术实现要素:
4.本发明针对上述问题提供了一种用于取酒醅的悬吊式冗余驱动机器人。
5.为达到上述目的本发明采用了以下技术方案:
6.一种用于取酒醅的悬吊式冗余驱动机器人,包括基座,所述基座通过固定底座转动安装在平面行车机构上,用于实现在平面内的水平移动,所述基座由顶板、后板和安装在顶板下表面的两个铰接耳组成,在两个所述铰接耳之间铰接有大臂,所述大臂的驱动端铰接有一号连杆和二号连杆,所述一号连杆的另一端与一号直线驱动机构中的滑块铰接,所述大臂的末端与小臂的中部铰接,所述二号连杆的另一端与二号直线驱动机构中的滑块铰接,所述一号直线驱动机构安装在基座的顶板上,所述二号直线驱动机构安装在基座的后板上,在两个铰接耳之间还铰接有摇杆,所述摇杆与大臂同轴铰接,所述摇杆的驱动端与四号连杆的一端铰接,所述四号连杆的另一端与三号直线驱动机构中的滑块铰接,所述摇杆的末端与三号连杆的一端铰接,所述三号连杆的另一端与小臂的驱动端铰接,所述三号连杆两端的铰接点与大臂中部和末端的铰接点之间的连线呈平行四边形,所述小臂的末端与末端连接座铰接,在其中一个所述铰接耳上还铰接有一号辅助连杆,所述一号辅助连杆的另一端与二号辅助连杆的一端铰接,所述一号辅助连杆两端的铰接点与大臂末端的铰接点以及大臂中部的铰接点之间的连线呈平行四边形,所述二号辅助连杆的中部与大臂的末端和小臂的中部同轴铰接,所述二号辅助连杆的末端与三号辅助连杆的一端铰接,所述二号辅助连杆呈v形,所述二号辅助连杆上的三个铰接点之间的连线呈三角形,所述三号辅助连杆的另一端与末端连接座铰接,所述三号辅助连杆两端的铰接点与小臂末端的铰接点以及
小臂中部的铰接点之间的连线呈平行四边形,在所述末端连接座上安装有取料器夹爪,在所述取料器夹爪上安装有工业相机和激光测距仪,分别用于采集酒缸的图像和获取取料器夹爪与地面之间的距离。
7.进一步,所述一号直线驱动机构、二号直线驱动机构和三号直线驱动机构均为丝杠滑块机构。
8.再进一步,所述铰接耳上两个铰接点之间的连线与水平线之间的夹角为α,所述末端连接座上两个铰接点之间的连线与水平线之间的夹角为β,所述二号辅助连杆的夹角为γ,γ=α+β。
9.更进一步,所述固定底座的上端与平面行车机构固定连接,在所述固定底座的下端固定连接有底座法兰,所述固定底座和底座法兰均与基座转动连接,所述底座法兰的下表面与rv减速机的输出盘固定连接,所述rv减速机的机身与输出外壳连接,所述输出外壳固定连接在基座的顶板上,在所述rv减速机的输入轴通过带传动的方式与根部驱动电机的输出轴连接,所述根部驱动电机固定安装在输出外壳上。
10.更进一步,所述平面行车机构包括对称设置的两个支撑架,在两个支撑架之间架设有两个移动横梁,且所述移动横梁可通过驱动装置的驱动在支撑架上进行滑动,在两个所述移动横梁上共同设置有鞍座,所述鞍座可通过驱动装置的驱动在移动横梁上进行滑动。
11.与现有技术相比本发明具有以下优点:
12.本发明基座可相对于平面行车机构进行旋转,同时配合大臂、小臂的摆动,至少可以对邻近区域的3
×
3个酒缸进行取酒醅动作,大大的提升了工作效率,配合实际需求布置输送机,可实现邻近取料放料;
13.本发明固定底座悬吊安装在平面行车机构上,可通过平面行车机构带动大臂和小臂等进行整体的横向和纵向移动,可满足大型酒企工作空间的要求,适应较大规模的酒缸取料作业,配合大臂和小臂自身的较大工作范围,降低了行车取料卸料的往返次数,同时通过悬吊安装的形式,更容易实现在抓取料深度方向上的升降,更避免了对地面下的酒缸直接负载;
14.本发明通过平行四边形连杆的设计以及α、β和γ之间的配合限定,可以保证取料器夹爪不会产生倾斜,保证其竖直状态不变。
附图说明
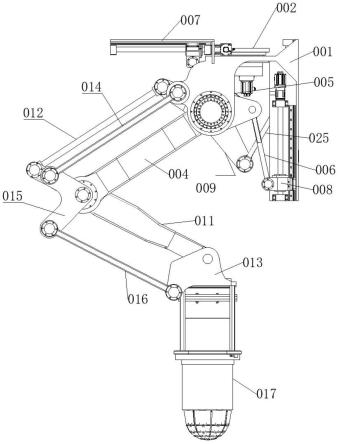
15.图1为本发明无平面行车机构的主视图;
16.图2为本发明无平面行车机构的轴测图;
17.图3为本发明无平面行车机构的左视图;
18.图4为本发明图3中圈a的局部放大图;
19.图5为本发明固定底座、底座法兰、rv减速机和根部驱动电机的安装示意图;
20.图6为本发明取料器夹爪的结构示意图;
21.图7为本发明的结构示意图;
22.图8为本发明图7中圈c的局部放大图;
23.图9为本发明取料器夹爪的俯视图;
24.图10为本发明图9中a-a截面的剖视图;
25.图11为本发明图10中框a的局部放大图;
26.图12为本发明图10中圈b的局部放大图;
27.图13为本发明图9中b-b截面的剖视图;
28.图14为本发明取料器夹爪中转动盘与丝杠螺母的连接示意图;
29.图15为本发明取料器夹爪中内桶、活动铲以及板式滑轨之间的安装示意图;
30.图16为本发明取料器夹爪中活动铲的结构示意图;
31.图17为本发明取料器夹爪中限位导轨与导轨安装板的连接示意图;
32.图18为本发取料器夹爪中明行星齿轮组的结构示意图;
33.图19为本发明取料器夹爪中推料机构的结构示意图;
34.图20为本发明取料器夹爪中限位挡圈的结构示意图;
35.图21为本发明取料器夹爪中内桶的结构示意图;
36.图22为本发明取料器夹爪中旋转壳体下部的结构示意图;
37.图23为本发明取料器夹爪中壳体三的结构示意图;
38.图中,基座—001、固定底座—002、平面行车机构—003、大臂—004、一号连杆—005、二号连杆—006、一号直线驱动机构—007、二号直线驱动机构—008、摇杆—009、三号直线驱动机构—010、小臂—011、三号连杆—012、末端连接座—013、一号辅助连杆—014、二号辅助连杆—015、三号辅助连杆—016、取料器夹爪—017、工业相机—018、激光测距仪—019、底座法兰—020、rv减速机—021、输出外壳—022、根部驱动电机—024、四号连杆—025、顶板—0011、后板—0012、铰接耳—0013、支撑架—0031、移动横梁—0032、鞍座—0033、行走齿轮—0034、行走齿条—0035、行走电机—0036、导轨—0037、行走减速器—0038、定位块—0039、输出盘—0211、机身—0212、输入轴—0213、固定壳体—1、旋转壳体—2、空心丝杠机构—3、随动机构—4、内桶—5、行星齿轮组—6、轴承挡圈—7、推料机构—8、滑座—9、安装板—10、滑动槽—11、滑动导轨—12、辊子安装块—13、支撑辊子—14、壳体一—101、壳体二—102、壳体三—103、豁口—104、丝杠螺母—301、一号电机—302、一号主动齿轮—303、一号从动齿轮—304、丝杠法兰—305、空心丝杠—306、螺母挡片—307、滑槽—308、限位导轨—309、导轨安装板—310、转动盘—401、转动盘挡片—402、板式滑轨—403、活动铲—404、活动片—414、扭簧—424、限位凸起—434、销轴—444、二号电机—601、二号主动齿轮—602、行星架—603、二号从动齿轮—604、行星齿轮—606、内齿圈—607、推板—801、推杆—802、限位挡圈—803、延伸桶—804、推料螺母—805、推料丝杠—806、三号从动齿轮—807、三号主动齿轮—808、三号电机—809、限位槽—810、限位块—811。
具体实施方式
39.为了进一步阐述本发明的技术方案,下面通过实施例对本发明进行进一步说明。
40.如图1至图7所示,一种用于取酒醅的悬吊式冗余驱动机器人,包括基座001,所述基座001通过固定底座002转动安装在平面行车机构003上,用于实现在平面内的水平移动,所述固定底座002的上端与平面行车机构003中的鞍座0033固定连接,在所述固定底座002的下端固定连接有底座法兰020,所述固定底座002和底座法兰020均与基座001转动连接,所述底座法兰020的下表面与rv减速机021的输出盘0211固定连接,所述rv减速机021的机
身0212与输出外壳022连接,所述输出外壳022固定连接在基座001的顶板0011上,在所述rv减速机021的输入轴0213通过带传动的方式与根部驱动电机024的输出轴连接,所述根部驱动电机024固定安装在输出外壳022上所述基座001由顶板0011、后板0012和安装在顶板0011下表面的两个铰接耳0013组成,在两个所述铰接耳0013之间铰接有大臂004,所述大臂004的驱动端铰接有一号连杆005和二号连杆006,所述一号连杆005的另一端与一号直线驱动机构007中的滑块铰接,所述大臂004的末端与小臂011的中部铰接,所述二号连杆006的另一端与二号直线驱动机构008中的滑块铰接,所述一号直线驱动机构007安装在基座001的顶板0011上,所述二号直线驱动机构008安装在基座001的后板0012上,在两个铰接耳0013之间还铰接有摇杆009,所述摇杆009与大臂004同轴铰接,所述摇杆009的驱动端与四号连杆025的一端铰接,所述四号连杆025的另一端与三号直线驱动机构010中的滑块铰接,所述摇杆009的末端与三号连杆012的一端铰接,所述三号连杆012的另一端与小臂011的驱动端铰接,所述三号连杆012两端的铰接点与大臂004中部和末端的铰接点之间的连线呈平行四边形,所述小臂011的末端与末端连接座013铰接,在其中一个所述铰接耳0013上还铰接有一号辅助连杆014,所述铰接耳0013上两个铰接点之间的连线与水平线之间的夹角为α,所述一号辅助连杆014的另一端与二号辅助连杆015的一端铰接,所述一号辅助连杆014两端的铰接点与大臂004末端的铰接点以及大臂004中部的铰接点之间的连线呈平行四边形,所述二号辅助连杆015的中部与大臂004的末端和小臂011的中部同轴铰接,所述二号辅助连杆015的末端与三号辅助连杆016的一端铰接,所述二号辅助连杆015呈v形,所述二号辅助连杆015的夹角为γ,所述二号辅助连杆015上的三个铰接点之间的连线呈三角形,所述三号辅助连杆016的另一端与末端连接座013铰接,所述末端连接座013上两个铰接点之间的连线与水平线之间的夹角为β,满足γ=α+β,所述三号辅助连杆016两端的铰接点与小臂011末端的铰接点以及小臂011中部的铰接点之间的连线呈平行四边形,在所述末端连接座013上安装有取料器夹爪017,在所述取料器夹爪017上安装有工业相机018和激光测距仪019,分别用于采集酒缸的图像和获取取料器夹爪017与地面之间的距离,在取料器夹爪017移动至缸口附近后,工业相机018拍摄多张图像,提取缸的轮廓特征,通过图像采集卡回传给计算机,计算缸口圆心位置与取料器夹爪017位置的偏差,而后控制大臂004和小臂011摆动进行纠偏,在锁定缸口位置后,控制取料器夹爪017下放,激光测距仪19获取取料器夹爪017与地面的距离,以确定挖取深度,当距离小于预先设定好的阈值,停止酒醅挖料动作,执行后续工序。
41.所述平面行车机构003包括对称设置的两个支撑架0031,在两个支撑架0031之间架设有两个移动横梁0032,且所述移动横梁0032可通过驱动装置的驱动在支撑架0031上进行滑动,在两个所述移动横梁0032上共同设置有鞍座0033,所述鞍座0033可通过驱动装置的驱动在移动横梁0032上进行滑动,具体为:在所述移动横梁0032上固定有行走齿条0035和导轨0037,在所述鞍座0033上安装有行走电机0036和行走减速器0038,所述行走电机0036的输出轴与行走减速器0038的输入轴连接,所述行走减速器0038的两个输出上均安装有与行走齿条0035啮合的行走齿轮0034,在所述鞍座0033上还安装有与导轨0037对应的定位块0039,用于实现鞍座0033移动的导向。
42.所述一号直线驱动机构007、二号直线驱动机构008和三号直线驱动机构010均为丝杠滑块机构。
43.所述取料器夹爪017包括固定壳体1、旋转壳体2和推料机构8,所述旋转壳体2通过轴承与固定壳体1转动连接,所述旋转壳体2通过行星齿轮组6带动其转动,所述推料机构8用于在提料完成后将内桶5内的酒醅颗粒推出;
44.所述固定壳体1包括壳体一101、壳体二102和壳体三103,所述壳体二102与壳体一101固定连接,所述壳体三103固定连接在壳体二102上,所述旋转壳体2的上部套设在壳体一101和壳体二102上,在所述旋转壳体2与壳体一101之间以及旋转壳体2与壳体二102之间均设置有轴承,所述旋转壳体2与壳体一101之间的轴承通过其旋转壳体2与壳体一101自身的轴肩结构实现限位,所述旋转壳体2与壳体二102之间的轴承通过轴承挡圈7和旋转壳体2内部的轴肩实现限位,所述轴承挡圈7通过螺钉固定安装在壳体二102的下端面上,在所述壳体三103上安装有空心丝杠机构3,在所述空心丝杠机构3的丝杠螺母301上转动连接有随动机构4,用于带动随动机构4升降,在所述旋转壳体2内腔的下部固定连接有内桶5,所述内桶5为正多边形结构,所述随动机构4的下部滑动设置在内桶5与旋转壳体2的夹层之间;
45.所述随动机构4包括转动盘401,所述转动盘401与丝杠螺母301转动连接,在所述转动盘401上固定连接有转动盘挡片402,用于对转动盘401与丝杠螺母301之间的轴承进行限位,在所述转动盘401的侧表面均匀分布设置有多个板式滑轨403,在所述旋转壳体2的内表面设置有与板式滑轨403一一对应的滑座9,在所述旋转壳体2内固定内桶5的安装板10上设置有与板式滑轨403一一对应的滑动槽11,在所述板式滑轨403的下端固定连接有活动铲404,所述活动铲404由多个活动片414组成,相邻活动片414之间通过销轴444铰接,在所述销轴444上设置有扭簧424,以便于相邻活动片414之间实现自动相对旋转,在除最上方之外的活动片414的上部均设置有限位凸起434,以限制相邻活动片414之间的最大旋转角度,在每个所述活动铲404的左右两侧均设置有滑动导轨12,所述滑动导轨12固定安装在内桶5的外表面,所述活动铲404最上方的活动板与滑动导轨12滑动连接,在所述内桶5的下端面固定设置多个与限位导轨309一一对应的辊子安装块13,在相邻的辊子安装块13之间转动安装有支撑辊子14,用于辅助活动铲404滑动。
46.所述空心丝杠机构3包括一号电机302,所述一号电机302固定安装在壳体一101的上表面,所述一号电机302的输出轴向下穿过壳体一101安装有一号主动齿轮303,所述一号主动齿轮303啮合连接有一号从动齿轮304,所述一号从动齿轮304固定安装在丝杠法兰305上,所述丝杠法兰305通过轴承转动安装在壳体三103内部,在所述壳体三103上设置有用于供一号主动齿轮303和一号从动齿轮304啮合连接的豁口104,所述丝杠法兰305的下端面与空心丝杠306固定连接,在所述空心丝杠306上螺纹连接有丝杠螺母301,在所述丝杠螺母301上固定设置有螺母挡片307,用于对转动盘401与丝杠螺母301之间的轴承进行限位,在所述丝杠螺母301上对称设置有两个滑槽308,在所述滑槽308内设置有限位导轨309,在两个所述限位导轨309的两端均共同连接有导轨安装板310,其中一个所述导轨安装板310固定连接在壳体三103上。
47.所述行星齿轮组6包括二号电机601、二号主动齿轮602、行星架603、二号从动齿轮604、行星齿轮606和内齿圈607,所述二号电机601固定安装在壳体一101的上表面,所述二号主动齿轮602安装在二号电机601的输出轴上,且位于壳体一101的内部,所述行星架603固定安装在壳体一101内腔的中部,所述二号从动齿轮604安装在行星架603上,所述二号从动齿轮604为双排齿轮,所述二号从动齿轮604的上部与二号主动齿轮602啮合连接,所述行
星齿轮606有三个,均匀分布安装在二号从动齿轮604与内齿圈607之间,所述行星齿轮606与二号从动齿轮604的下部以及内齿圈607啮合连接,所述内齿圈607固定安装在旋转壳体2的内圆周面上。
48.所述推料机构8包括推板801、推杆802、限位挡圈803、延伸桶804、推料螺母805、推料丝杠806、三号从动齿轮807、三号主动齿轮808和三号电机809,所述推板801设置在内桶5的内部,所述推杆802的下端与推板801的上表面中心固定连接,所述推杆802为中空结构,在所述推杆802的外圆周面上设置有限位槽810,在所述限位挡圈803上设置有与限位槽810对应的限位块811,所述限位挡圈803固定安装在延伸桶804内腔的下端,所述延伸桶804的上端与壳体三103固定连接,所述推料螺母805固定在所述推杆802的上端,并与推料丝杠806螺纹连接,所述推料丝杠806转动安装在壳体三103上,所述推料丝杠806的上端穿过壳体三103与三号从动齿轮807固定连接,所述三号主动齿轮808安装在三号电机809的输出轴上并与三号从动齿轮807啮合连接,所述三号电机809固定安装在壳体一101的上表面。
49.取料器夹爪017提取时,将取料器夹爪017伸入陶缸内一定位置,然后通过二号电机601带动旋转壳体2旋转,且取料器夹爪017在大臂004和小臂011的作用下持续下降至一定高度,完成内桶5的取料,随后一号电机302工作,带动板式滑轨403伸出,活动铲404在扭簧424的作用下,自动卷曲,完成对酒醅颗粒的包裹,随后大臂004和小臂011带动取料器夹爪017从缸内移动至指定位置,然后三号电机809带动推板801伸出,将内桶5内的酒醅颗粒推出,实现酒醅颗粒的取出。
50.以上显示和描述了本发明的主要特征和优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
51.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1