一种腱线驱动的手功能康复外骨骼
1.本发明属于康复医疗器械技术领域,具体指一种腱线驱动的手功能康复外骨骼。
背景技术:
2.目前,随着人口老龄化的不断加剧,如何提高老年人生活质量,成为了诸多国家亟待解决的社会问题。中风与脑卒中都是在老年人群中高发的疾病,因其引起的手部功能障碍严重影响老年人日常生活,手功能康复外骨骼可以抑制手指的痉挛,增加手指关节活动度、锻炼手指屈伸肌群、改善血液循环、恢复手指肌力,有效促进了患者手部功能的康复。
3.通过刚性连杆机构进行手部康复训练时,患者佩戴不舒适、易产生二次伤害,气动手部外骨骼由于控制精度低,并且在充气弯曲时,安装在手指关节处的气动外骨骼易磨损漏气。通过电机带动腱线驱动的手部外骨骼,是基于正常人体手指结构与运动仿生学原理进行设计的,可以更好的适应手指的自然运动,也具有控制精确、噪音小、成本低等优点,但腱线驱动的手部外骨骼还普遍存在一些不足,比如:1)驱动装置与安装手部的执行机构有一定距离,导致装置便携性较差;2)驱动每个手指需要单独的电机,导致功率损耗大、也增加了装置的整体重量;3)缺乏对手指各关节单独屈伸的训练;4)缺乏对手指外展内收功能的训练;5)未对腱线进行穿线布置,易发生腱线缠绕杂乱。
技术实现要素:
4.为解决现有技术上的不足,本发明提供了一种腱线驱动的手功能康复外骨骼,通过小型减速电机驱动腱线,利用运动仿生学原理,使用腱线代替控制手指屈伸的屈肌与伸肌,对手指进行牵引,从而实现对手指的屈伸动作训练,以及关节的独立屈伸动作训练,并且可利用腱线驱动患者手指做展收动作训练。
5.为达到上述目的,本发明提供以下技术方案:一种腱线驱动的手功能康复外骨骼,主要包括指骨壳机构、驱动机构与固定机构,所述指骨壳机构包括四指指骨壳机构、拇指指骨壳机构、伸肌腱线、屈肌腱线、展收腱线与指骨滑块;所述驱动机构包括四指伸展驱动机构、四指屈曲驱动机构、拇指伸展驱动机构、拇指屈曲驱动机构与指骨展收驱动机构;所述固定机构包括手背板、手掌板、第一固定带、第二固定带,患者佩戴时通过第一固定带和第二固定带将手背板和手掌板贴合在患者手掌两侧。
6.作为优选,所述四指指骨壳机构的单个手指均包括远节指骨壳、中节指骨壳、近节指骨壳;拇指指骨壳机构包括拇指远节指骨壳、拇指近节指骨壳,在每个指骨壳横截面开设四个腱线孔,用于穿入伸肌腱线与屈肌腱线。
7.作为优选,所述四指指骨壳机构中的远节指骨壳、中节指骨壳、近节指骨壳依次铰接;拇指指骨壳机构中的拇指远节指骨壳与拇指近节指骨壳铰接,四指的近节指骨壳与手背四指掌骨部分通过球面副铰接,拇指近节指骨壳与手背拇指掌骨部分通过球面副铰接。
8.作为优选,所述四指指骨壳机构中的远节指骨壳与中节指骨壳、拇指指骨壳机构
中的拇指远节指骨壳与拇指近节指骨壳的侧面均开设t型滑槽,t型滑槽中装有指骨滑块;拇指近节指骨壳和食指、无名指、小指的近节指骨壳上分别固接有拇指展收驱动件、食指展收驱动件、无名指展收驱动件、小指展收驱动件。
9.作为优选,所述远节指骨壳与中节指骨壳的t型滑槽内开设滑块凹槽,在指骨滑块滑至滑块凹槽位置时,向内按压使得指骨滑块嵌入滑块凹槽形成对远节指骨壳与中节指骨壳的锁紧,在伸肌腱线与屈肌腱线牵拉指骨壳机构做屈伸运动时,远端指间关节固定不受训练,此时仅对掌指关节与近端指间关节做屈伸训练。
10.作为优选,所述四指伸展驱动机构包括第一伸肌腱线缠绕件、第一轴承、第一小型减速电机、第一伸展从动齿轮、第一伸展主动齿轮、伸肌腱线,其中第一小型减速电机与第一伸展主动齿轮同轴线连接,第一伸展从动齿轮与第一伸肌腱线缠绕件同轴线连接,伸肌腱线缠绕在第一伸肌腱线缠绕件上。
11.作为优选,所述四指屈曲驱动机构包括第一屈肌腱线缠绕件、第二轴承、第二小型减速电机、第一屈曲从动齿轮、第一屈曲主动齿轮、屈肌腱线,其中第二小型减速电机与第一屈曲主动齿轮同轴线连接,第一屈曲从动齿轮与第一屈肌腱线缠绕件同轴线连接,屈肌腱线缠绕在第一屈肌腱线缠绕件上。
12.作为优选,所述第一伸肌腱线缠绕件为阶梯形圆柱结构,结构中设有第一上肋板、第一隔板层、第一下肋板,一共开设了八个腱线孔用于穿入穿出四根腱线,其中第一上肋板开设四个腱线孔、第一下肋板开设四个腱线孔,第一隔板层置于第一上肋板与第一下肋板之间,防止第一上肋板的腱线孔与第一下肋板的腱线孔穿入穿出的腱线缠绕杂乱,第一上肋板、第一下肋板边缘开设第一腱线凹槽便于缠绕件运动时所带动的腱线缠绕,第一伸肌腱线缠绕件的第一连接轴与第一轴承过盈配合,所述第一屈肌腱线缠绕件与所述第一伸肌腱线缠绕件结构相同。
13.作为优选,食指指骨壳机构的伸肌腱线从远节指骨壳开始穿入,依次穿入中节指骨壳、近节指骨壳、手背板、第一伸肌腱线缠绕件,随即从第一伸肌腱线缠绕件开始穿出,依次穿出手背板、近节指骨壳、中节指骨壳、远节指骨壳,最后与远节指骨壳处的伸肌腱线穿入段相连接形成闭环。
14.作为优选,食指指骨壳机构的屈肌腱线从远节指骨壳开始穿入,依次穿入中节指骨壳、近节指骨壳、手掌板、第一屈肌腱线缠绕件,随即从第一屈肌腱线缠绕件开始穿出,依次穿出手掌板、近节指骨壳、中节指骨壳、远节指骨壳,最后与远节指骨壳处的屈肌腱线穿入段相连接形成闭环,四指指骨壳机构中的无名指指骨壳机构、中指指骨壳机构和小指指骨壳机构的穿线方式与食指指骨壳机构的穿线方式相同。
15.作为优选,所述拇指伸展驱动机构包括第二伸肌腱线缠绕件、第三轴承、第三小型减速电机、第二伸展从动齿轮、第二伸展主动齿轮、伸肌腱线,其中第三小型减速电机与第二伸展主动齿轮同轴线连接,第二伸展从动齿轮与第二伸肌腱线缠绕件同轴线连接,伸肌腱线缠绕在第二伸肌腱线缠绕件上。
16.作为优选,所述拇指屈曲驱动机构包括第二屈肌腱线缠绕件、第四轴承、第四小型减速电机、第二屈曲从动齿轮、第二屈曲主动齿轮、屈肌腱线,其中第四小型减速电机与第二屈曲主动齿轮同轴线连接,第二屈曲从动齿轮与第二屈肌腱线缠绕件同轴线连接,屈肌腱线缠绕在第二屈肌腱线缠绕件上。
17.作为优选,所述第二伸肌腱线缠绕件为阶梯圆柱结构,结构中设有中间肋板,中间肋板一侧开设一对腱线孔用于穿入穿出伸肌腱线,另一侧设有第二腱线凹槽便于缠绕件运动时所带动的腱线缠绕,第二伸肌腱线缠绕件的第二连接轴与第三轴承过盈配合,所述的第二屈肌腱线缠绕件与所述的第二伸肌腱线缠绕件结构相同。
18.作为优选,所述拇指指骨壳机构的伸肌腱线从拇指远节指骨壳开始穿入,依次穿入拇指近节指骨壳、第二伸肌腱线缠绕件,随即从第二伸肌腱线缠绕件开始穿出,依次穿过拇指近节指骨壳、拇指远节指骨壳,最后与拇指远节指骨壳处的伸肌腱线穿入段相连接形成闭环。
19.作为优选,所述拇指指骨壳机构的屈肌腱线从拇指远节指骨壳开始穿入,依次穿入拇指近节指骨壳、第二屈肌腱线缠绕件,随即从第二屈肌腱线缠绕件开始穿出,依次穿过拇指近节指骨壳、拇指远节指骨壳,最后与拇指远节指骨壳处的屈肌腱线穿入段相连接形成闭环。
20.作为优选,所述指骨展收驱动机构包括:第一指骨展收驱动件、第二指骨展收驱动件、拇指展收驱动件、食指展收驱动件、无名指展收驱动件、小指展收驱动件、第五小型减速电机、第一展收从动齿轮、第二展收从动齿轮、展收主动齿轮、惰轮轴、第五轴承、第六轴承、展收腱线,第五小型减速电机与展收主动齿轮同轴线连接,第一展收从动齿轮与第一指骨展收驱动件同轴线连接、第二展收从动齿轮与第二指骨展收驱动件同轴线连接,展收腱线依次穿过第一指骨展收驱动件、第二指骨展收驱动件与拇指展收驱动件、食指展收驱动件、无名指展收驱动件、小指展收驱动件。
21.作为优选,所述第一指骨展收驱动件整体为阶梯圆柱结构,结构中设置第二隔板层,第二隔板层上方为第二上肋板、下方为第二下肋板,共开设八个腱线孔,其中第二上肋板左右各一对腱线孔、第二下肋板左右各一对腱线孔,用于穿入穿出展收腱线,下方设置第三连接轴与第五轴承过盈配合;所述食指展收驱动件整体为阶梯圆柱结构、结构中开设两对腱线孔、左右各一对;所述的第二指骨展收驱动件与所述的第一指骨展收驱动件结构相同,所述的拇指展收驱动件、无名指展收驱动件、小指展收驱动件与所述的食指展收驱动件结构相同。
22.作为优选,所述用于驱动手指展收的展收腱线成对使用,拇指展收驱动件、食指展收驱动件均由第一指骨展收驱动件驱动,无名指展收驱动件、小指展收驱动件均由第二指骨展收驱动件驱动,其穿线方式相同,以食指为例:一条展收腱线从食指指骨壳机构上的食指展收驱动件开始穿入、通过第一指骨展收驱动件,从第一指骨展收驱动件开始穿出、通过食指展收驱动件,与食指展收驱动件腱线孔处的腱线穿入段相连接,形成闭环;另一条展收腱线从食指展收驱动件开始穿入、通过第一指骨展收驱动件,从第一指骨展收驱动件开始穿出、通过食指展收驱动件,与食指展收驱动件腱线孔处的腱线穿入段相连接,形成闭环。
23.作为优选,展收主动齿轮与惰轮啮合、惰轮与第一展收从动齿轮啮合、展收主动齿轮同时与第二展收从动齿轮啮合,当第五小型减速电机带动展收主动齿轮顺时针运转时,与其啮合的惰轮和第二展收从动齿轮逆时针运转,与惰轮啮合的第一展收从动齿轮顺时针运转,第一展收从动齿轮带动第一指骨展收驱动件顺时针运转、第二展收从动齿轮带动第二指骨展收驱动件逆时针旋转,进而:第一指骨展收驱动件带动拇指展收驱动件、食指展收驱动件顺时针旋转,第二指骨展收驱动件带动无名指展收驱动件、小指展收驱动件逆时针
旋转,此时驱动手指做外展动作;同理,当第五小型减速电机逆时针运转时,驱动手指做内收动作。
24.作为优选,所述手背板整体分为手背四指掌骨部分、手背拇指掌骨部分,其中手背拇指掌骨部分与手背四指掌骨部分成15
°
倾斜,为适应手背弧度,手背板与手背接触面做弧形处理,手背板上固定有手背腱线导向板,手背腱线导向板上的腱线孔分别与食指、中指、无名指、小指指骨壳机构的伸肌腱线穿出穿入的腱线孔相对应,手背腱线导向板上的腱线孔与第一伸肌腱线缠绕件上开设的腱线孔一一对齐,便于伸肌腱线的穿入穿出,防止腱线缠绕杂乱。
25.作为优选,所述手掌板整体分为手掌四指掌骨部分、手掌拇指掌骨部分,其中手掌拇指掌骨部分与手掌四指掌骨部分成15
°
倾斜,为适应手掌弧度,手掌板与手掌接触面做弧形处理,手掌板上固定有手掌腱线导向板,手掌腱线导向板上的腱线孔分别与食指、中指、无名指、小指指骨壳机构的屈肌腱线穿入穿出的腱线孔相对应,手掌腱线导向板上的腱线孔与第一屈肌腱线缠绕件上开设的腱线孔一一对齐,便于屈肌腱线的穿入穿出,防止腱线缠绕杂乱。
26.与现有技术相比,本发明具有如下的优点和有益效果:1)本发明的结构紧凑、集成度高、便于携带、轻巧高效;2)本发明使用两个电机单独控制拇指的屈伸动作训练,使其对拇指的训练更具针对性,使用两个电机同时控制食指、中指、无名指、小指四个手指的屈伸动作训练,使用一个电机同时控制拇指、食指、无名指、小指的展收动作训练,装置的电机总数量较少,功率损耗小,整体重量轻;3)本发明可通过指骨滑块对远端指间关节进行锁紧,从而改变关节的运动训练模式:当拇指指骨壳机构上的指骨滑块锁紧时,指间关节不做训练,只对其掌指关节进行针对训练;当四指指骨壳机构上的指骨滑块均锁紧时,其四指的远端指间关节不做训练,只对其近端指间关节与掌指关节进行针对训练;4)本发明中设置了用于腱线穿过的腱线孔,有效避免腱线缠绕杂乱的情况。
27.附图说明
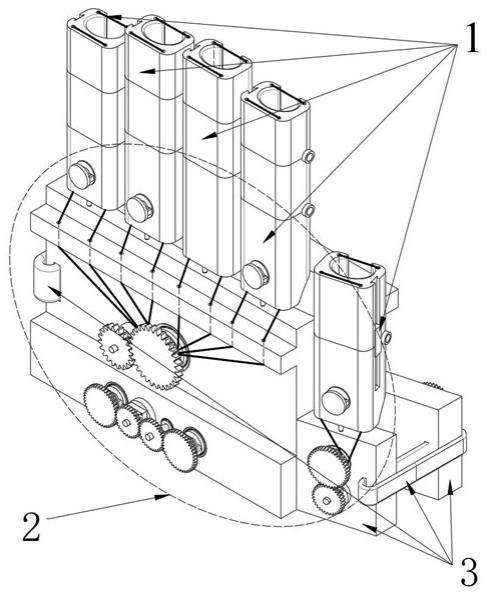
28.构成本发明的一部分附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1为本发明的手功能康复外骨骼整体装配图图2为本发明的外骨骼伸肌腱线布线图图3为本发明的外骨骼屈肌腱线布线图图4为本发明的食指指骨壳机构装配图图5为本发明的拇指指骨壳机构装配图图6为本发明的远节指骨壳结构示意图图7为本发明的中节指骨壳结构示意图图8为本发明的近节指骨壳结构示意图图9为本发明的手指伸展驱动机构爆炸图图10为本发明的手指屈曲驱动机构爆炸图图11为本发明的第一伸肌腱线缠绕件示意图
图12为本发明的第一屈肌腱线缠绕件示意图图13为本发明的食指屈伸腱线穿线示意图a图14为本发明的食指屈伸腱线穿线示意图b图15为本发明的第二伸肌腱线缠绕件示意图图16为本发明的第二屈肌腱线缠绕件示意图图17为本发明的拇指屈伸腱线穿线示意图a图18为本发明的拇指屈伸腱线穿线示意图b图19为本发明的指骨展收驱动机构爆炸图图20为本发明的第一指骨展收驱动件结构示意图图21为本发明的食指展收驱动件结构示意图图22为本发明的食指、拇指展收腱线穿线示意图图23为本发明的无名指、小指展收腱线穿线示意图图24为本发明的外骨骼执行外展、内收动作示意图图25为本发明的指骨展收驱动机构的传动原理图图26为本发明的手背板手背腱线导向板的腱线孔分布示意图图27为本发明的手背板整体示意图图28为本发明的手掌板手掌腱线导向板的腱线孔分布示意图图29为本发明的手掌板整体示意图附图标记说明:1-指骨壳机构,2-驱动机构,3-固定机构,11-四指指骨壳机构,12-拇指指骨壳机构,13-伸肌腱线,14-屈肌腱线,15-展收腱线,16-指骨滑块,21-四指伸展驱动机构,22-四指屈曲驱动机构,23-拇指伸展驱动机构,24-拇指屈曲驱动机构,25-指骨展收驱动机构,111-远节指骨壳,112-中节指骨壳,113-近节指骨壳,121-拇指远节指骨壳,122-拇指近节指骨壳,111a、111b、111c、111d为远节指骨壳的腱线孔,112a、112b、112c、112d为中节指骨壳的腱线孔,113a、113b、113c、113d为近节指骨壳的腱线孔,211-第一伸肌腱线缠绕件,212-第一轴承,213-第一小型减速电机,214-第一伸展从动齿轮,215-第一伸展主动齿轮,2111-第一连接轴,2112-第一隔板层,2113-第一腱线凹槽,2114-第一上肋板,2115-第一下肋板,211a、211b、211c、211d、211e、211f、211g、211h为第一伸肌腱线缠绕件的腱线孔,221-第一屈肌腱线缠绕件,222-第二轴承,223-第二小型减速电机,224-第一屈曲从动齿轮,225-第一屈曲主动齿轮,221a、221b、221c、221d、221e、221f、221g、221h为第一屈肌腱线缠绕件的腱线孔,231-第二伸肌腱线缠绕件,232-第三轴承,233-第三小型减速电机,234-第二伸展从动齿轮,235-第二伸展主动齿轮,2311-第二连接轴,2312-中间肋板,2313-第二腱线凹槽,231a、231b为第二伸肌腱线缠绕件的腱线孔,241-第二屈肌腱线缠绕件,242-第四轴承,243-第四小型减速电机,244-第二屈曲从动齿轮,245-第二屈曲主动齿轮,241a、241b为第二屈肌腱线缠绕件的腱线孔,251-第一指骨展收驱动件,252-第二指骨展收驱动件,253-拇指展收驱动件,254-食指展收驱动件,255-无名指展收驱动件,256-小指展收驱动件,257-第五小型减速电机,258-第一展收从动齿轮,259-第二展收从动齿轮,2511-展收主动齿轮,2512-惰轮轴,2513-第五轴承,2514-第六轴承,2515-第三连接轴,2516-第二隔板层,2517-第二上肋板,2518-第二下肋板,251a、251b、251c、251d、251e、251f、251g、251h为
第一指骨展收驱动件的腱线孔,254a、254b、254c、254d为食指展收驱动件的腱线孔,31-手背板,32-手掌板,33-第一固定带,34-第二固定带,311-手背四指掌骨部分,312-手背拇指掌骨部分,321-手掌四指掌骨部分,322-手掌拇指掌骨部分,3111-手背腱线导向板,31a、31b、31c、31d、31e、31f、31g、31h为手背板的腱线孔,3211-手掌腱线导向板,32a、32b、32c、32d、32e、32f、32g、32h为手掌板的腱线孔。
具体实施方式
29.为使本发明专利的目的、技术方案和优点更加清楚明了,下面将结合参考附图和实施例来详细说明本发明的具体结构和工作方式。
30.如附图1、附图2、附图3所示,一种腱线驱动的手功能康复外骨骼,主要包括指骨壳机构1、驱动机构2与固定机构3,所述指骨壳机构1包括四指指骨壳机构11、拇指指骨壳机构12、伸肌腱线13、屈肌腱线14、展收腱线15与指骨滑块16;所述驱动机构2包括四指伸展驱动机构21、四指屈曲驱动机构22、拇指伸展驱动机构23、拇指屈曲驱动机构24与指骨展收驱动机构25;所述固定机构3包括手背板31、手掌板32、第一固定带33、第二固定带34,患者佩戴时通过第一固定带33和第二固定带34将手背板31和手掌板32贴合在患者手掌两侧。
31.进一步,如附图2、附图3、附图4、附图5、附图6、附图7、附图8所示,所述四指指骨壳机构11的单个手指均包括远节指骨壳111、中节指骨壳112、近节指骨壳113;拇指指骨壳机构12包括拇指远节指骨壳121、拇指近节指骨壳122,在每个指骨壳横截面开设四个腱线孔,用于穿入伸肌腱线13与屈肌腱线14。
32.进一步,如附图2、附图3、附图4、附图5、附图27所示,所述四指指骨壳机构11中的远节指骨壳111、中节指骨壳112、近节指骨壳113依次铰接;拇指指骨壳机构12中的拇指远节指骨壳121与拇指近节指骨壳122铰接,四指的近节指骨壳113与手背四指掌骨部分311通过球面副铰接,拇指近节指骨壳122与手背拇指掌骨部分312通过球面副铰接。
33.进一步,如附图4、附图5所示,所述四指指骨壳机构11中的远节指骨壳111与中节指骨壳112、拇指指骨壳机构12中的拇指远节指骨壳121与拇指近节指骨壳122的侧面均开设t型滑槽,t型滑槽中装有指骨滑块16;拇指近节指骨壳122和食指、无名指、小指的近节指骨壳113上分别固接有拇指展收驱动件253、食指展收驱动件254、无名指展收驱动件255、小指展收驱动件256。
34.进一步,如附图4所示,所述远节指骨壳111与中节指骨壳112的t型滑槽内开设滑块凹槽,在指骨滑块16滑至滑块凹槽位置时,向内按压使得指骨滑块16嵌入滑块凹槽形成对远节指骨壳111与中节指骨壳112的锁紧,在伸肌腱线13与屈肌腱线14牵拉指骨壳机构做屈伸运动时,远端指间关节固定不受训练,此时仅对四指的掌指关节与近端指间关节做屈伸训练。
35.进一步,如附图5所示,所述拇指远节指骨壳121与拇指近节指骨壳122的t型滑槽内开设滑块凹槽,在指骨滑块16滑至滑块凹槽位置时,向内按压使得指骨滑块16嵌入滑块凹槽形成对拇指远节指骨壳121与拇指近节指骨壳122的锁紧,在伸肌腱线13与屈肌腱线14牵拉指骨壳机构做屈伸运动时,指间关节固定不受训练,此时仅对拇指的掌指关节做屈伸训练。
36.进一步,如附图2、附图9、附图11所示,所述四指伸展驱动机构21包括第一伸肌腱
线缠绕件211、第一轴承212、第一小型减速电机213、第一伸展从动齿轮214、第一伸展主动齿轮215、伸肌腱线13,其中第一小型减速电机213与第一伸展主动齿轮215同轴线连接,第一伸展从动齿轮214与第一伸肌腱线缠绕件211同轴线连接,伸肌腱线13缠绕在第一伸肌腱线缠绕件211上。
37.进一步,如附图3、附图10、附图12所示,所述四指屈曲驱动机构22包括第一屈肌腱线缠绕件221、第二轴承222、第二小型减速电机223、第一屈曲从动齿轮224、第一屈曲主动齿轮225、屈肌腱线14,其中第二小型减速电机223与第一屈曲主动齿轮225同轴线连接,第一屈曲从动齿轮224与第一屈肌腱线缠绕件221同轴线连接,屈肌腱线14缠绕在第一屈肌腱线缠绕件221上。
38.进一步,如附图11、附图12所示,所述第一伸肌腱线缠绕件211为阶梯形圆柱结构,结构中设有第一上肋板2114、第一隔板层2112、第一下肋板2115,一共开设了八个腱线孔用于穿入穿出四根腱线,腱线孔211a、211b、211g、211h为第一上肋板腱线孔,腱线孔211c、211d、211e、211f为第一下肋板腱线孔,第一隔板层2112置于第一上肋板2114与第一下肋板2115之间,防止第一上肋板2114的腱线孔与第一下肋板2115的腱线孔穿入穿出的腱线缠绕杂乱,第一上肋板2114、第一下肋板2115边缘开设第一腱线凹槽2113便于缠绕件运动时所带动的腱线缠绕,第一伸肌腱线缠绕件211的第一连接轴2111与第一轴承212过盈配合,所述第一屈肌腱线缠绕件221与所述第一伸肌腱线缠绕件211结构相同。
39.进一步,如附图13所示,所述食指指骨壳机构的伸肌腱线13从远节指骨壳111上所开设的腱线孔111a开始穿入,依次穿入中节指骨壳112、近节指骨壳113、手背板31的腱线孔31a、第一伸肌腱线缠绕件211的腱线孔211a,随即从第一伸肌腱线缠绕件211的腱线孔211b开始穿出,依次穿出手背板31的腱线孔31b、近节指骨壳113、中节指骨壳112、远节指骨壳111,最后从远节指骨壳111的腱线孔111b穿出,与远节指骨壳111的腱线孔111a处的伸肌腱线13穿入段相连接形成闭环。
40.进一步,如附图14所示,所述食指指骨壳机构的屈肌腱线14从远节指骨壳111上所开设的腱线孔111c开始穿入,依次穿入中节指骨壳112、近节指骨壳113、手掌板32的腱线孔32a、第一屈肌腱线缠绕件221的腱线孔211h,随即从第一屈肌腱线缠绕件221的腱线孔211g开始穿出,依次穿出手掌板32的腱线孔32b、近节指骨壳113、中节指骨壳112、远节指骨壳111,最后从远节指骨壳111的腱线孔111d穿出,与远节指骨壳111的腱线孔111c处的屈肌腱线14穿入段相连接形成闭环,四指指骨壳机构11中的无名指指骨壳机构、中指指骨壳机构和小指指骨壳机构的穿线方式与食指指骨壳机构的穿线方式相同。
41.进一步,如附图2、附图9、附图15所示,所述拇指伸展驱动机构23包括第二伸肌腱线缠绕件231、第三轴承232、第三小型减速电机233、第二伸展从动齿轮234、第二伸展主动齿轮235、伸肌腱线13,其中第三小型减速电机233与第二伸展主动齿轮235同轴线连接,第二伸展从动齿轮234与第二伸肌腱线缠绕件231同轴线连接,伸肌腱线13缠绕在第二伸肌腱线缠绕件231上。
42.进一步,如附图3、附图10、附图16所示,所述拇指屈曲驱动机构24包括第二屈肌腱线缠绕件241、第四轴承242、第四小型减速电机243、第二屈曲从动齿轮244、第二屈曲主动齿轮245、屈肌腱线14,其中第四小型减速电机243与第二屈曲主动齿轮245同轴线连接,第二屈曲从动齿轮244与第二屈肌腱线缠绕件241同轴线连接,屈肌腱线14缠绕在第二屈肌腱
线缠绕件241上。
43.进一步,如附图15、附图16所示,所述第二伸肌腱线缠绕件231为阶梯圆柱结构,结构中设有中间肋板2312,中间肋板2312一侧开设一对腱线孔用于穿入穿出伸肌腱线13,其中外侧为腱线孔231a、内侧为腱线孔231b,另一侧设有第二腱线凹槽2313便于缠绕件运动时所带动的腱线缠绕,第二伸肌腱线缠绕件231的第二连接轴2311与第三轴承232过盈配合,所述的第二屈肌腱线缠绕件241与所述的第二伸肌腱线缠绕件231结构相同。
44.进一步,如附图17所示,所述拇指指骨壳机构12的伸肌腱线13从拇指远节指骨壳121所开设的腱线孔121a开始穿入,依次穿入拇指近节指骨壳122、第二伸肌腱线缠绕件231的腱线孔231a,随即从第二伸肌腱线缠绕件231的腱线孔231b开始穿出,依次穿过拇指近节指骨壳122、拇指远节指骨壳121,最后从拇指远节指骨壳121的腱线孔121b穿出,与拇指远节指骨壳121的腱线孔121a处的伸肌腱线13穿入段相连接形成闭环。
45.进一步,如附图18所示,所述拇指指骨壳机构12的屈肌腱线14从拇指远节指骨壳121所开设的腱线孔121c开始穿入,依次穿入拇指近节指骨壳122、第二屈肌腱线缠绕件241的腱线孔241b,随即从第二屈肌腱线缠绕件241的腱线孔241a开始穿出,依次穿过拇指近节指骨壳122、拇指远节指骨壳121,最后从拇指远节指骨壳121的腱线孔121d穿出,与拇指远节指骨壳121的腱线孔121c处的屈肌腱线14穿入段相连接形成闭环。
46.进一步,如附图19、附图20、附图21所示,所述指骨展收驱动机构25包括:第一指骨展收驱动件251、第二指骨展收驱动件252、拇指展收驱动件253、食指展收驱动件254、无名指展收驱动件255、小指展收驱动件256、第五小型减速电机257、第一展收从动齿轮258、第二展收从动齿轮259、展收主动齿轮2511、惰轮轴2512、第五轴承2513、第六轴承2514、展收腱线15,第五小型减速电机257与展收主动齿轮2511同轴线连接,第一展收从动齿轮258与第一指骨展收驱动件251同轴线连接、第二展收从动齿轮259与第二指骨展收驱动件252同轴线连接,展收腱线15依次穿过第一指骨展收驱动件251、第二指骨展收驱动件252与拇指展收驱动件253、食指展收驱动件254、无名指展收驱动件255、小指展收驱动件256。
47.进一步,如附图20、附图21所示,所述第一指骨展收驱动件251整体为阶梯圆柱结构,结构中设置第二隔板层2516,第二隔板层2516上方为第二上肋板2517、下方为第二下肋板2518,共开设八个腱线孔,其中251a、251b、251c、251d为第二上肋板2517的腱线孔、251e、251f、251g、251h为第二下肋板2518的腱线孔,用于穿入穿出展收腱线15,下方设置第三连接轴2515与第五轴承2513过盈配合;所述食指展收驱动件254整体为阶梯圆柱结构、结构中开设两对腱线孔:254a、254b、254c、254d;所述的第二指骨展收驱动件252与所述的第一指骨展收驱动件251结构相同,所述的拇指展收驱动件253、无名指展收驱动件255、小指展收驱动件256与所述的食指展收驱动件254结构相同。
48.进一步,如附图22、附图23所示,所述用于驱动手指展收的展收腱线15成对使用,拇指展收驱动件253、食指展收驱动件254均由第一指骨展收驱动件251驱动,无名指展收驱动件255、小指展收驱动件256均由第二指骨展收驱动件252驱动,其穿线方式相同,以食指为例:一条展收腱线15从食指指骨壳机构上的食指展收驱动件254的腱线孔254a开始穿入、通过第一指骨展收驱动件251的腱线孔251a,随即,从第一指骨展收驱动件251的腱线孔251b开始穿出、通过食指展收驱动件254的腱线孔254b,与食指展收驱动件254的腱线孔254a处的腱线穿入段相连接,形成闭环;另一条展收腱线15从食指展收驱动件254的腱线孔
254c开始穿入、通过第一指骨展收驱动件251的腱线孔251c,随即,从第一指骨展收驱动件251的腱线孔251d开始穿出、通过食指展收驱动件254的腱线孔254d,与食指展收驱动件254的腱线孔254c处的腱线穿入段相连接,形成闭环。
49.进一步,如附图24、附图25所示,展收主动齿轮2511与惰轮啮合、惰轮与第一展收从动齿轮258啮合、展收主动齿轮2511同时与第二展收从动齿轮259啮合,当第五小型减速电机257带动展收主动齿轮2511顺时针运转时,与其啮合的惰轮和第二展收从动齿轮259逆时针运转,与惰轮啮合的第一展收从动齿轮258顺时针运转,第一展收从动齿轮258带动第一指骨展收驱动件251顺时针运转、第二展收从动齿轮259带动第二指骨展收驱动件252逆时针旋转,进而:第一指骨展收驱动件251带动拇指展收驱动件253、食指展收驱动件254顺时针旋转,第二指骨展收驱动件252带动无名指展收驱动件255、小指展收驱动件256逆时针旋转,此时驱动手指做外展动作;同理,当第五小型减速电机257逆时针运转时,驱动手指做内收动作。
50.进一步,如附图26、附图27所示,所述手背板31整体分为手背四指掌骨部分311、手背拇指掌骨部分312,其中手背拇指掌骨部分312与手背四指掌骨部分311成15
°
倾斜,为适应手背弧度,手背板31与手背接触面做弧形处理,手背板31上固定有手背腱线导向板3111,手背腱线导向板3111上的腱线孔31a、31b、31g、31h分别为食指、小指指骨壳机构的伸肌腱线13穿出穿入的腱线孔,手背腱线导向板3111上的腱线孔31c、31d、31e、31f分别为中指、无名指指骨壳机构伸肌腱线13穿入穿出的腱线孔,腱线孔:31a、31b、31g、31h与第一伸肌腱线缠绕件211的第一上肋板2114上开设的腱线孔211a、211b、211g、211h对齐,腱线孔:31c、31d、31e、31f与第一伸肌腱线缠绕件211的第一下肋板2115上开设的腱线孔211c、211d、211e、211f对齐,便于伸肌腱线13的穿入穿出,防止腱线缠绕杂乱。
51.进一步,如附图28、附图29所示,所述手掌板32整体分为手掌四指掌骨部分321、手掌拇指掌骨部分322,其中手掌拇指掌骨部分322与手掌四指掌骨部分321成15
°
倾斜,为适应手掌弧度,手掌板32与手掌接触面做弧形处理,手掌板32上固定有手掌腱线导向板3211,手掌腱线导向板3211上的腱线孔32a、32b、32g、32h分别为食指、小指指骨壳机构的屈肌腱线14穿入穿出的腱线孔,手掌腱线导向板3211上的腱线孔32c、32d、32e、32f分别为中指、无名指穿入穿出的腱线孔,腱线孔:32a、32b、32g、32h与第一屈肌腱线缠绕件221的腱线孔221a、221b、221g、221h对齐,腱线孔:32c、32d、32e、32f与第一屈肌腱线缠绕件221的腱线孔221c、221d、221e、221f对齐,便于屈肌腱线14的穿入穿出,防止腱线缠绕杂乱。
52.以上描述了本发明的基本原理和主要特征。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1