印花定位双模式完全解耦并联机构
1.本发明属于机器人技术领域,具体涉及一种印花定位双模式完全解耦并联机构。
背景技术:
2.增材印花套印时需要对印网进行对位,从而使得不同色彩油墨进行套印,得到精美的图案。在需要多次套印的工艺下,印网定位精度对增材印花的质量具有重要影响。
3.当印网到达指定位置后,进行增材印花,印花压力对印网的定位位置的准确性具有一定影响。一般情况下,印花定位印网设备的刚度高,则印花压力对定位精度的影响低。
4.目前,现有印花定位设备主要通过机器视觉技术,通过调整控制方法来实现印花定位设备的定位精度,一般情况均使用平面并联机构来实现。现有高精度平面定位(x、y轴移动和绕平行与z轴转动)装置的并联机构并非完全解耦的机构构型,控制难度较完全解耦的机构构型高,误差模型和补偿较复杂。目前现有的完全解耦的平面并联机构较为少见。完全解耦的并联机构在运动方程简单,容易对其进行运动控制。
5.然而,完全解耦的并联机构在刚度方面较一般并联机构小。对于增材印花对位设备工作时,需要承受印花的压力,完全解耦的并联机构在印花时的定位精度不稳定。
技术实现要素:
6.本发明的目的是提供一种印花定位双模式完全解耦并联机构,解决了现有平面运动并联机构运动学不解耦,可控性相对不高,印花定位设备刚度小的问题。
7.本发明所采用的技术方案是,印花定位双模式完全解耦并联机构,包括有定平台和动平台,定平台上连接有第一支链、第二支链、第三支链、第四支链、第五支链、第六支链及第七支链;定平台分别通过第一支链、第二支链、第三支链、第四支链、第五支链、第六支链、第七支链与动平台连接;
8.第一支链包括有依次连接的第十一移动副p11、第二连杆、第十二转动副r12、第三连杆、第十三移动副p13、“v”形连杆单元、第十四移动副p14、第五连杆及第十五转动副r15,第十一移动副p11还与定平台连接,第十五转动副r15还与定平台连接,“v”形连杆单元还与动平台连接。
9.本发明的特征还在于,
[0010]“v”形连杆单元包括有第四连杆及第十六移动副p16,第四连杆为“v”形连杆,第四连杆的一端与第十三移动副p13连接,第四连杆的另一端通过第十六移动副p16与动平台连接,第四连杆的折点处连接有第十四移动副p14;第十一移动副p11设置移动驱动副。
[0011]
第二支链包括有依次连接的第二十一移动副p21、第六连杆,第二十二转动副r22、第七连杆、折线连杆单元、第九连杆及第二十六转动副r26;第二十一移动副p21还与定平台连接,第二十六转动副r26还与定平台连接,折线连杆单元还与动平台连接;
[0012]
第二十一移动副p21设置移动驱动副。
[0013]
折线连杆单元包括有具有两个转折点的折线形的第八连杆,第八连杆一端的端部
连接有第二十三移动副p23,第八连杆另一端的端部连接有第二十五移动副p25;第二十三移动副p23与第七连杆连接,第二十五移动副p25与动平台连接;第八连杆的任意一个转折点上设置有第二十四移动副p24,第二十四移动副p24与第九连杆连接。
[0014]
第三支链包括有依次连接的第三十一转动副r31、第十连杆,第三十二移动副p32、第十一连杆及第三十三移动副p33;第三十一转动副r31还与定平台连接,第三十三移动副p33还与动平台连接;第三十一转动副r31设置转动驱动副。
[0015]
第四支链包括有依次连接的第四十一球副s41、第十三连杆、第四十二移动副p42、第十四连杆及第四十三球副s43;第四十一球副s41还与定平台连接,第四十三球副s43还与动平台连接;第四十二移动副p42设置移动驱动副。
[0016]
第五支链包括有依次连接的第五十一球副s51、第十五连杆、第五十二移动副p52、第十六连杆及第五十三球副s53;第五十一球副s51还与定平台连接,第五十三球副s53还与动平台连接;第五十二移动副p52设置移动驱动副。
[0017]
第六支链包括有依次连接的第六十一球副s61、第十七连杆、第六十二移动副p62、第十八连杆及第六十三球副s63;第六十一球副s61还与定平台连接,第六十三球副s63还与动平台连接;第六十二移动副p62设置移动驱动副。
[0018]
第七支链包括有依次连接的第七十一球副s71、第十九连杆、第七十二移动副p72、第二十连杆及第七十三球副s73;第七十一球副s71还与定平台连接,第七十三球副s73还与动平台连接;第七十二移动副p72设置移动驱动副。
[0019]
本发明的有益效果是:
[0020]
本发明印花定位双模式完全解耦并联机构,解决了印花定位装备精度控制相对不高,弱化了印花时印花压力对印网定位精度的影响。本发明的并联机构具有定位高精度、印花高刚度、动态性能好的特点。本发明的并联机构在定位时,通过粗略定位高动态性能、精定位高精度、印花时高刚度,通过并联机构结构构型和驱动设置,保证印花整个工艺的高精度。
附图说明
[0021]
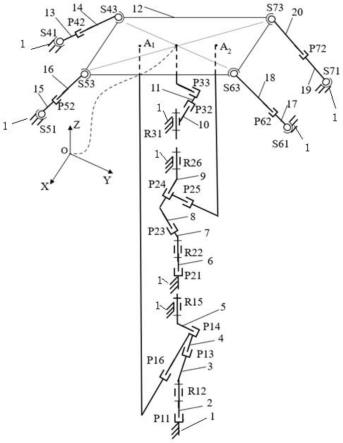
图1是本发明的一种印花定位双模式完全解耦并联机构示意图;
[0022]
图中,1.动平台,2.第二连杆,3.动平台,4.第四连杆,5.第五连杆,6.第六连杆,7.第七连杆,8.第八连杆,9.第九连杆,10.第十连杆,11.第十一连杆,12.动平台,13.第十三连杆,14.第十四连杆,15.第十五连杆,16.第十六连杆,17.第十七连杆,18.第十八连杆,19.第十九连杆,20.第二十连杆。
具体实施方式
[0023]
下面结合附图和具体实施方式对本发明进行详细说明。
[0024]
本发明提供一种印花定位双模式完全解耦并联机构,如图1所示,包括有定平台1和动平台12,定平台1上连接有第一支链、第二支链、第三支链、第四支链、第五支链、第六支链及第七支链;定平台1分别通过第一支链、第二支链、第三支链、第四支链、第五支链、第六支链、第七支链与动平台12连接;
[0025]
第一支链包括有依次连接的第十一移动副p11、第二连杆2、第十二转动副r12、第
三连杆3、第十三移动副p13、“v”形连杆单元、第十四移动副p14、第五连杆5及第十五转动副r15,第十一移动副p11还与定平台1连接,第十五转动副r15还与定平台1连接,“v”形连杆单元还与动平台12连接。
[0026]“v”形连杆单元包括有第四连杆4及第十六移动副p16,第四连杆4为“v”形连杆,第四连杆4的一端与第十三移动副p13连接,第四连杆4的另一端通过第十六移动副p16与动平台12连接,第四连杆4的折点处连接有第十四移动副p14;第十一移动副p11设置移动驱动副。
[0027]
第十一移动副p11平行于z轴方向,第十二转动轴r12轴线平行于z轴,过点o。第十三移动副p13移动方向与z轴正向夹角为45
°
,第十三移动副p13移动方向与第十四移动副p14移动方向夹角为45
°
,第十四移动副p14平行于y轴方向。第十五转动副r15轴线平行于z轴,过点o。移动副p16移动方向平行于x轴。
[0028]
第二支链包括有依次连接的第二十一移动副p21、第六连杆6,第二十二转动副r22、第七连杆7、折线连杆单元、第九连杆9及第二十六转动副r26;第二十一移动副p21还与定平台1连接,第二十六转动副r26还与定平台1连接,折线连杆单元还与动平台12连接;
[0029]
第二十一移动副p21设置移动驱动副。
[0030]
折线连杆单元包括有具有两个转折点的折线形的第八连杆8,第八连杆8一端的端部连接有第二十三移动副p23,第八连杆8另一端的端部连接有第二十五移动副p25;第二十三移动副p23与第七连杆7连接,第二十五移动副p25与动平台12连接;第八连杆8的任意一个转折点上设置有第二十四移动副p24,第二十四移动副p24与第九连杆9连接。
[0031]
第二十一移动副p21平行于z轴,第二十二转动副r22轴线平行于z轴,过点o。第二十三移动副p23的移动方向,与z轴夹角为45
°
。第二十三移动副p23的移动方向,与第二十四移动副p24移动方向夹角为45
°
。第二十四移动副p24移动方向平行于x轴。第二十五移动副p25移动方向平行于y轴。第二十六转动副r26轴线平行于z轴,过点o。
[0032]
第三支链包括有依次连接的第三十一转动副r31、第十连杆10,第三十二移动副p32、第十一连杆11及第三十三移动副p33;第三十一转动副r31还与定平台1连接,第三十三移动副p33还与动平台12连接;第三十一转动副r31设置转动驱动副。
[0033]
第三十一转动副轴线平行于z轴,过点o。第三十二移动副p32方向平行于x轴,第三十三移动副p33平行于y轴。
[0034]
第四支链包括有依次连接的第四十一球副s41、第十三连杆13、第四十二移动副p42、第十四连杆14及第四十三球副s43;第四十一球副s41还与定平台1连接,第四十三球副s43还与动平台12连接;第四十二移动副p42设置移动驱动副。
[0035]
第四十二移动副p42方向,平行于第四十一球副s41球心与第四十三球副s43球心的连线。
[0036]
第五支链包括有依次连接的第五十一球副s51、第十五连杆15、第五十二移动副p52、第十六连杆16及第五十三球副s53;第五十一球副s51还与定平台1连接,第五十三球副s53还与动平台12连接;第五十二移动副p52设置移动驱动副。
[0037]
第五十二移动副p52方向,平行于第五十一球副s51球心与第五十三球副s53球心的连线。
[0038]
第六支链包括有依次连接的第六十一球副s61、第十七连杆17、第六十二移动副
p62、第十八连杆18及第六十三球副s63;第六十一球副s61还与定平台1连接,第六十三球副s63还与动平台12连接;第六十二移动副p62设置移动驱动副。
[0039]
第六十二移动副p62方向,平行于第六十一球副s61球心与第六十三球副s63球心的连线。
[0040]
第七支链包括有依次连接的第七十一球副s71、第十九连杆19、第七十二移动副p72、第二十连杆20及第七十三球副s73;第七十一球副s71还与定平台1连接,第七十三球副s73还与动平台12连接;第七十二移动副p72设置移动驱动副。
[0041]
第七十二移动副p72方向,平行于第七十一球副s71球心与第七十三球副s73球心的连线。
[0042]
第三支链末端连接动平台12几何中心点o。
[0043]
第一支链末端连接动平台12点a1。
[0044]
第二支链末端连接动平台12点a2。
[0045]
点a1与点a2关于点o对称。
[0046]
本发明印花定位双模式完全解耦并联机构,印花对位分为三个阶段:
[0047]
第一阶段,控制第四十二移动副p42、第五十二移动副p52、第六十二移动副p62、第七十二移动副p72,使得动平台12几何中心点o快速到达目标位姿附近。
[0048]
第二阶段,控制第十一移动副p11、第二十一移动副p21、第三十一转动副r31,使得动平台12几何中心点o到达精确目标位姿。
[0049]
第三阶段,锁定第四十二移动副p42、第五十二移动副p52、第六十二移动副p62、第七十二移动副p72、第十一移动副p11、第二十一移动副p21、第三十一转动副r31,保持动平台12的精确位姿,进行印花。
[0050]
在第二阶段精确对位时,第十一移动副p11控制动平台12沿y方向的移动,第二十一移动副p21控制动平台12沿x方向的移动,第三十一转动副r31控制动平台12绕平行于z轴的轴线的转动,此时印花定位双模式完全解耦并联机构具有完全解耦的运动特性,便于控制。
[0051]
该印花定位双模式完全解耦并联机构另外一个特征是,动平台12始终绕平行于第十二转动副r12、第二十二转动副r22、第三十一转动副r31的轴线转动,转动轴线是固定的,该特征与能实现平面运动(x、y轴移动和绕平行与z轴转动)的串联结构的机器人相似,具有提升设备转动姿态精度的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1