一种全自动大幅面龙门平台裁断机的制作方法
1.本发明涉及自动裁断机领域,特别是指一种全自动大幅面龙门平台裁断机。
背景技术:
2.自动裁断机,又称为自动下料机,自动冲裁床等,它应用于将皮革、纺织布料、纸张、橡胶、包装材料等非金属物料通过自动裁断机机头推动刀模向下产生的冲压力实现物料裁断成型。
3.随着生活水平的提高,现在的人们对鞋子、箱包等的造型及样式越来越追求个性化,对面料的追求也越来越高级,这就意味着自动裁断机对面料加工图形越来越复杂,进而需要不断提升自动裁断机的智能化,来节约面料的浪费及人工成本。
4.目前现有的自动裁断机如附图1所示,机头a1通过滑块a2吊装到龙门架a3上,丝杆a4驱动机头a1做横向左右移动,刀模旋转电机a6变换刀模方向,机头驱动电机a5竖穿于龙门架a3中间,推动机头a1向下运动裁断物料,附图2、3所示为现有自动裁断机的排版及裁断路径。从附图2和3所示可以发现现有的自动裁断机排版非常单一,每次送料只能裁断一行非常浪费时间及物料。
技术实现要素:
5.针对现有技术存在的不足,本发明提供一种全自动大幅面龙门平台裁断机。
6.本发明采用如下技术方案:一种全自动大幅面龙门平台裁断机,包括有大幅面龙门平台、y轴伺服前后运动机构、x轴伺服左右运动机构、z轴伺服升降裁断机头、r轴伺服刀模旋转机构和u轴伺服送料机构;所述的大幅面龙门平台主要由大幅面上承压板、大幅面下承压平台、支撑连接柱组成,大幅面上承压板和大幅面下承压平台相互平行,且呈水平状态,主要用于承受z轴伺服升降裁断机头推动刀模在向下裁断物料向上的冲击力;所述的y轴伺服运动机构主要y轴轨道支架、y轴直线导轨、y轴滑块、y轴齿轮、y轴齿条、y轴伺服电机、y轴减速机和y轴支撑连接板组成,主要用于z轴伺服升降裁断机头的前后运动;所述x轴伺服左右运动机构主要由x轴第一横梁、x轴第二横梁、x轴直线导轨、x轴滑块、x轴齿轮、x轴齿条、x轴伺服电机、x轴减速机和x轴滑动平板组成,主要用于z轴伺服升降裁断机头的左右运动;所述z轴伺服升降裁断机头主要由大推力折叠伺服电动缸、z轴导向柱、z轴导向铜套和z轴导向柱连接板组成,主要用于推动刀模向下运动裁断物料;所述r轴伺服刀模旋转机构主要由固定板、c型支撑板、伺服电机、主同步轮、同步带、被动同步轮、刀模旋转轴、旋转轴承、刀模安装板和刀模固定片组成,主要用于变换刀模的角度;
所述u轴伺服送料机构主要由u轴送料滚筒支架、u轴滚筒、u轴耐切输送带、u轴送料下支撑板、u轴送料上夹板、u轴夹料气缸、u轴送料推板、u轴送料丝杆、u轴伺服电机和u轴减速机组成,主要用于物料的运输;具体工作原理,大幅面龙门平台的后方为进料端,前方为出料端,u轴伺服送料机构夹料气缸下压同时夹住耐切输送带物料和送料下支撑板,伺服电机带动减速机与送料丝杆旋转推动送料推板、送料下支撑板、耐切输送带和物料一起向前运动,运送面料经过z轴伺服升降裁断机头下方,y轴伺服运动机构与x轴伺服运动机构水平支撑着z轴伺服升降裁断机头左右、前后、到控制器设定位置,r轴伺服刀模旋转机构变换刀模的角度,z轴伺服升降裁断机头向下运动裁断物料;由上述对本发明结构的描述可知,和现有技术相比,本发明具有如下优点:z轴伺服升降裁断机头不再被限制在现有龙门架上,而是装配在y轴伺服前后运动机构和x轴伺服左右运动机构上做水平前后、左右运动,解决了现有的自动裁断机不能前后运动的缺陷,间接的也改变了排版与裁断路径,节省了大量的面料及送料时间;本发明设计合理的把z轴伺服升降裁断机头、z轴大推力折叠伺服电动缸的底座紧贴在大幅面龙门平台的大幅面上承压板下面,用来化解刀模在向下裁断物料向上的冲击力,大幅面龙门平台的作用在于可一次性加工更大面积的的物料(加工幅面越大排版就可以越省面料),且z轴伺服升降裁断机头采用现有z轴大推力折叠伺服电动缸为驱动源,与传统的液压机头相比,z轴大推力折叠伺服电动缸具有节能、低噪音、体质小和没有液压油泄漏的风险,更大的优点在于z轴大推力折叠伺服电动缸的上下运动非常精准,可以控制在0.1mm以内,所以在裁断面料过程中对u轴耐切输送带的伤害较小,从而延长了u轴耐切输送带的使用寿命。
附图说明
7.图1为现有自动裁断机的结构示意图;图2为现有自动裁断机的排版及裁断路径示意图;图3为现有自动裁断机的另一种排版及裁断路径示意图;图4为本发明的整体立体示意图;图5为本发明的俯视结构示意图;图6为本发明大幅面上承压板取下后的立体结构示意图;图7为本发明的y轴伺服前后运动机构、x轴伺服左右运动机构的立体结构示意图;图8为图7中a的结构示意图。
8.图9为图7中b的结构示意图。
9.图10为本发明的z轴伺服升降裁断机头和r轴伺服刀模旋转机构的立体结构示意图;图11为本发明的z轴伺服升降裁断机头和r轴伺服刀模旋转机构的分解示意图;图12为本发明的剖面示意图;图13为图12中c的结构示意图;图14为图12中d的结构示意图;图15为本发明的智能排版及裁断路径示意图。
10.附图标记列表
机头a1,滑块a2,龙门架a3,丝杆a4,机头驱动电机a5,刀模旋转电机a6。
11.y轴伺服电机2,r轴固定板5,u轴伺服送料机构8,u轴耐切输送带6,大幅面上承压板11,大幅面下承压平台12,支撑连接柱13,刀模53,y轴直线导轨21,y轴支撑连接板22,y轴轨道支架14,x轴第二横梁26,x轴第一横梁27,y轴齿条23,y轴齿轮24,x轴伺服电机29,x轴滑动平板31,c型支撑板51,z轴导向柱511,z轴导向铜套33,z轴导向柱连接板7,r轴刀模安装板52,r轴刀模旋转轴521,r轴被动同步轮522,r轴同步带523,r轴刀模固定片524,r轴主同步轮525,u轴送料滚筒支架18,u轴送料下支撑板82,u轴送料上夹板83,u轴夹料气缸84,u轴送料推板85,u轴送料丝杆86,u轴伺服电机25,z轴大推力折叠伺服电动缸1,底座41,r轴伺服电机65,y轴滑块32,y轴减速机34,x轴直线导轨35,x轴齿条36,x轴滑块38,x轴减速机39,x轴齿轮40,u轴滚筒48,出力螺纹轴头45,r轴旋转轴承60,u轴减速机28。
具体实施方式
12.下面参照附图说明本发明的具体实施方式。
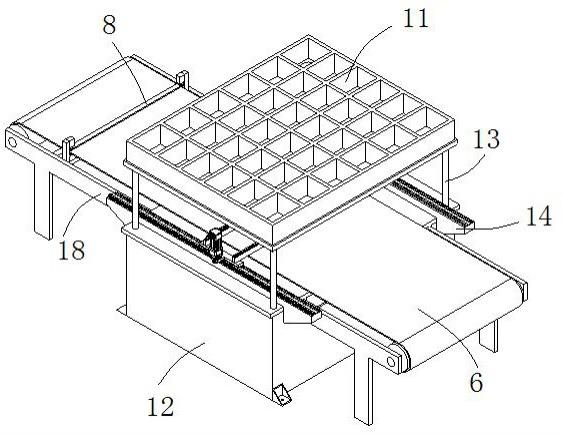
13.如附图4、5和6所示,所述的大幅面龙门平台包括大幅面上承压板11、大幅面下承压平台12、支撑连接柱13,大幅面上承压板11通过若干根支撑连接柱13安装于大幅面下承压平台12上方,该大幅面上承压板11和大幅面下承压平台12相互平行,且呈水平状态,大幅面下承压平台12上方左右两边各装有y轴轨道支架14。
14.如附图7和8所示,所述y轴伺服前后运动机构包括y轴轨道支架14、y轴直线导轨21、y轴滑块32、y轴齿轮24、y轴齿条23、y轴伺服电机2、y轴减速机34和y轴支撑连接板22,所述的y轴轨道支架14上各装有y轴直线导轨21、y轴齿条23,y轴直线导轨21上装有y轴滑块32,y轴滑块32上装有y轴支撑连接板22,y轴支撑连接板22上方中间装有y轴减速机34,y轴减速机34出轴装有y轴齿轮24与y轴齿条23相啮合,y轴减速机34上方装有y轴伺服电机2。
15.如附图7和9所示,所述x轴伺服左右运动机构包括x轴第一横梁27、x轴第二横梁26、x轴直线导轨35、x轴滑块38、x轴齿轮40、x轴齿条36、x轴伺服电机29、x轴减速机39和x轴滑动平板31,所述y轴支撑连接板22上面前后两头分别装有x轴第一横梁27、x轴第二横梁26,x轴第一横梁27上方装有x轴齿条36、x轴直线导轨35,x轴直线导轨35上装有x轴滑块38,x轴第二横梁26上方装有x轴直线导轨35,x轴直线导轨35上装有x轴滑块38,x轴滑块38上方装有x轴滑动平板31,x轴滑动平板31的一边装有x轴减速机39,x轴减速机39出轴装有x轴齿轮40与x轴齿条36相啮合,x轴减速机39上方装有x轴伺服电机29。
16.如附图10、11和13所示,所述z轴伺服升降裁断机头包括z轴大推力折叠伺服电动缸1、z轴导向柱511、z轴导向铜套33和z轴导向柱连接板7,所述的x轴滑动平板31上方中间装有z轴大推力折叠伺服电动缸1,z轴大推力折叠伺服电动缸1的底座41装配紧贴于大幅面上承压板11下方,且z轴大推力折叠伺服电动缸1的出力螺纹轴头45穿过x轴滑动平板31后与r轴伺服刀模旋转机构的c型支撑板51相连接。
17.如附图11所示,所述r轴伺服刀模旋转机构包括r轴固定板5、c型支撑板51、r轴伺服电机65、r轴主同步轮525、r轴同步带523、r轴被动同步轮522、r轴刀模旋转轴521、r轴旋转轴承60、r轴刀模安装板52和r轴刀模固定片524,所述c型支撑板51装于r轴固定板5上方,r轴固定板5左边装有r轴伺服电机65,r轴伺服电机65出轴装有r轴主同步轮525,r轴主同步轮525上装有r轴同步带523,r轴同步带523另一端装有r轴被动同步轮522,r轴被动同步轮
522中间装有r轴刀模旋转轴521,r轴刀模旋转轴521中间装有r轴旋转轴承60,r轴刀模旋转轴521的另一端与r轴刀模安装板52相连接,r轴刀模安装板52四边装有r轴刀模固定片524,r轴刀模安装板52下方装有刀模53,r轴固定板5上方还装有z轴导向柱511,z轴导向柱511穿过x轴滑动平板31、z轴导向铜套33与z轴导向柱连接板7连接。
18.如附图12和14所示,所述u轴伺服送料机构8包括u轴送料滚筒支架18、u轴滚筒48、u轴耐切输送带6、u轴送料下支撑板82、u轴送料上夹板83、u轴夹料气缸84、u轴送料推板85、u轴送料丝杆86、u轴伺服电机25和u轴减速机28,所述大幅面龙门平台前后两方各装有u轴送料滚筒支架18,u轴送料滚筒支架18前后两端各装有u轴滚筒48,u轴滚筒48上装有u轴耐切输送带6,u轴送料滚筒支架18后方装有u轴送料下支撑板82,u轴送料下支撑板82上面装有u轴送料上夹板83,u轴送料上夹板83上方装有u轴夹料气缸84,u轴送料下支撑板82下面还装有u轴送料推板85、u轴送料推板85中间装有u轴送料丝杆86,u轴送料丝杆86与u轴减速机28相连接,u轴减速机28一边装有u轴伺服电机25,需要送料时u轴夹料气缸84下压同时夹住u轴耐切输送带6、物料和u轴送料下支撑板82,u轴伺服电机25带动u轴减速机28与u轴送料丝杆86旋转推动u轴送料推板85、u轴送料下支撑板82、u轴耐切输送带6和物料一起向前运动送料。
19.在本实施方式描述中,有些术语“x”、“y”、“z”、“u”、“r”、“大幅面”、“水平”、“前后”、“左右”、“上下”、等仅是为了描述本发明和简化描述,因此不能理解为对本发明的限制。
20.以上实施方式仅用于说明本发明的技术方案,而非对其限制,不能认定本发明的具体实施方式只局限于这些说明,对本领域的工作人员其依然可对前述各实施方式进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1