机器人及其末端控制装置的制作方法
1.本技术涉及机器人控制技术领域,特别是涉及一种机器人及其末端控制装置。
背景技术:
2.随着产业的升级和智能化自动化水平的不断提高,工业机械臂、协作机器人等机器人设备的应用范围越来越广,例如可应用于产品测试、机器人装配、磨削、打磨、抛光、碰撞检测、柔性拖动和医疗按摩等各个行业。与此同时,协同机器人设备完成作业需求的末端执行装置也越来越多,例如,各种夹爪工具、各类传感器以及工业智能相机等。
3.目前,传统的机器人在控制各种协同末端执行装置时,一般均通过机器人的主控模块外加转接设备或者从电控箱中引出到机器人末端等方式,不仅增大了接线复杂度,还无法保证安全性问题,失效风险极大。
技术实现要素:
4.基于此,有必要针对传统机器人连接的协同执行装置无法保证安全性,失效风险极大的问题,提供一种机器人及其末端控制装置。
5.一种机器人的末端控制装置,其特征在于,包括:受力检测模块、控制模块与输入输出模块,所述受力检测模块、所述控制模块与所述输入输出模块均设置于机器人末端,所述受力检测模块连接所述控制模块,所述控制模块连接所述输入输出模块,所述输入输出模块用于连接外部执行装置;
6.所述受力检测模块用于检测所述机器人末端的受力数据,并将所述受力数据发送至所述控制模块;
7.所述输入输出模块用于将所述外部执行装置反馈的作业状态数据发送至所述控制模块;
8.所述控制模块用于根据所述受力数据与所述作业状态数据生成控制指令,并将所述控制指令通过所述输入输出模块下发至所述外部执行装置。
9.在其中一个实施例中,所述受力检测模块包括两个以上的力应变检测单元,各所述力应变检测单元均匀安装于所述机器人末端的对外作用面。
10.在其中一个实施例中,各所述力应变检测单元均包括力应变检测块与检测电路板,所述力应变检测块固定于所述机器人末端的对外作用面,所述检测电路板固定于所述力应变检测块,所述检测电路板还连接所述控制装置;
11.所述力应变检测块用于在所述机器人末端的对外作用面受到外力作用时产生形变;所述检测电路板用于检测所述形变,并转化为受力数据发送至所述控制模块。
12.在其中一个实施例中,所述力应变检测块包括第一弹性形变块、第二弹性形变块、传力柱与力应变测试片,所述第一弹性形变块与所述第二弹性形变块均固定于所述传力柱,所述力应变测试片的一端固定于所述传力柱,且所述力应变测试片设置于所述第一弹性形变块与所述第二弹性形变块之间,所述力应变测试片的另一端设置有背光片,所述第
一弹性形变块或所述第二弹性形变块固定于所述机器人末端的对外作用面。
13.在其中一个实施例中,所述检测电路板上设置有光栅检测芯片与biss-c通讯电路,所述光栅检测芯片与所述背光片相对设置,所述光栅检测芯片通过所述biss-c通讯电路连接所述控制模块。
14.在其中一个实施例中,所述输入输出模块包括模拟量输入单元、第一数字量输入单元与数字量输出单元,所述模拟量输入单元、所述第一数字量输入单元与所述数字量输出单元均连接所述控制模块,所述第一数字量输入单元与所述数字量输出单元还均连接所述外部执行装置。
15.在其中一个实施例中,所述输入输出模块还包括第二数字量输入单元,所述第二数字量输入单元连接所述数字量输出单元与所述控制模块,所述第二数字量输入单元用于将所述数字量输出单元输出的控制信号闭环反馈至所述控制模块。
16.在其中一个实施例中,上述机器人的末端控制装置还包括与所述控制模块连接的rs485通信模块、rs232通信模块以及ethercat通信模块。
17.在其中一个实施例中,上述机器人的末端控制装置还包括电源控制及检测保护模块,所述电源控制及检测保护模块连接所述控制模块与所述输入输出模块。
18.在其中一个实施例中,提供了一种机器人,包括主控装置以及上述的末端控制装置,所述末端控制装置连接所述主控装置。
19.上述机器人及其末端控制装置,通过在机器人末端增加控制模块与输入输出模块,辅以受力检测模块实时检测机器人模块的受力数据,控制模块再根据受力数据直接生成控制指令对外部执行装置进行控制,减少了信息传输的时差与复杂的中间接线,保证机器人在运行过程中的安全性,极大程度地避免了保护功能的失效风险。
附图说明
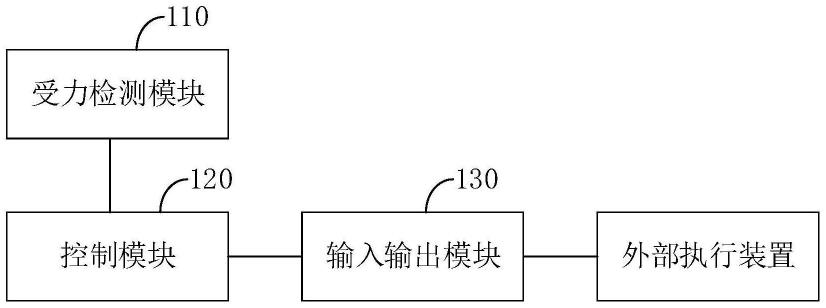
20.图1为一个实施例中机器人末端控制装置的系统框图;
21.图2为一个实施例中力应变检测单元的设置示意图;
22.图3为另一个实施例中机器人末端控制装置的系统框图;
23.图4为一个实施例中力应变检测块的结构示意图;
24.图5为一个实施例中输入输出单元的系统框图。
具体实施方式
25.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
27.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一电阻称为第二电阻,且类似地,可将第二
电阻称为第一电阻。第一电阻和第二电阻两者都是电阻,但其不是同一电阻。
28.可以理解,以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
29.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。
30.如背景技术所述,随着产业的升级和智能化自动化水平的不断提高,机械臂、协作机器人等机器人设备的应用范围越来越广,例如可应用于产品测试、机器人装配、磨削、打磨、抛光、碰撞检测、柔性拖动和医疗按摩等各个行业。与此同时,协同机器人设备完成作业需求的末端执行装置也越来越多,例如,各种夹爪工具、各类传感器以及工业智能相机等。传统的机器人在控制各种协同末端执行装置时,一般均通过机器人的主控模块外加转接设备或者从电控箱中引出到机器人末端等方式,不仅增大了接线复杂度,还无法保证安全性问题,失效风险极大。
31.基于此,本技术提供一种机器人及其末端控制装置,通过在机器人末端增加控制模块与输入输出模块,辅以受力检测模块实时检测机器人模块的受力数据,控制模块再根据受力数据直接生成控制指令对外部执行装置进行控制,减少了信息传输的时差与复杂的中间接线,保证机器人在运行过程中的安全性,极大程度地避免了保护功能的失效风险。
32.在一个实施例中,如图1所示,提供了一种机器人的末端控制装置,包括:受力检测模块110、控制模块120与输入输出模块130,受力检测模块110、控制模块120与输入输出模块130均设置于机器人末端,受力检测模块110连接控制模块120,控制模块120连接输入输出模块130,输入输出模块130用于连接外部执行装置;受力检测模块110用于检测机器人末端的受力数据,并将受力数据发送至控制模块120;输入输出模块130用于将外部执行装置反馈的作业状态数据发送至控制模块120;控制模块120用于根据受力数据与作业状态数据生成控制指令,并将控制指令通过输入输出模块130下发至外部执行装置。
33.其中,机器人可以是指协作机器人或者机械手臂等自动控制设备,此类自动控制设备包括下发运动控制指令的主控模块,还包括响应运动控制指令的各关节运动模块,各关节运动模块相互配合以完成运行控制指令对应运动操作。可以理解,机器人末端指的是机械臂的最外关节段,以六自由度机械臂为例,机器人末端指的是其第六轴的对外端。
34.外部执行装置表征机器人末端可能装配有的负载装置,可以是指用于辅助完成各种装配、打磨、铸件以及抛光作业的卡盘、机械爪等夹爪工具,此类外部执行装置可以是安装固定于机器人末端法兰处的。外部执行装置还可以是用于产品测试与碰撞检测的传感器元件或工业智能相机,可以是固定安装或连接与机器人末端。对应地,外部执行装置反馈的作业状态数据可以是传感器元件检测到的传感数据,或者是工业智能相机采集到的图像数据。
35.具体地,受力检测模块110、控制模块120与输入输出模块130均设置于机器人末端,可辅助在机器人末端完成部分运动控制及保护功能。可以理解,上述设置于机器人末端的控制模块120是区别于机器人自身的主控模块的,在主控模块下发了整体的运动控制指令并控制各关节运动模块执行运动操作的同时,机器人末端的控制模块120可根据受力检
测模块110的受力数据以及输入输出模块130反馈的作业状态数据,实现部分末端运动控制及保护功能,避免将数据传回主控模块实现时传输延时导致的保护失效风险。
36.进一步地,受力检测模块110用于感知机器人末端受到的环境作用力的受力变化情况,可采用弹性形变单元设置于机器人末端法兰的对外作用面上,再采集弹性形变单元的受力变形情况实现,也可直接采用多维力传感器装置实现。在本实施例中,机器人末端法兰的对外作用面为机器人末端法兰与外部执行装置的接触面,或者指的是与环境作用力可能发生接触的作用面。可以理解,对外作用面并不唯一,在机器人末端处于不同的应用场景时并不相同。例如,当机器人末端安装有夹爪工具实现装配、打磨、铸件以及抛光等作业时,对外作用面为机器人末端法兰用于固定夹爪工具的作用面,受力检测模块110固定于该对外作用面,处于机器人末端法兰与夹爪工具之间。当应用于产品测试或碰撞检测时,可能机器人末端未安装有其他外部执行装置,则机器人末端的对外作用面,即受力检测模块110固定的位置,可以是与环境作用力可能发生接触的任意一个作用面。
37.其中,受力检测模块110检测得到的受力数据,可包括机器人末端受到的环境作用力的大小与方向。可以理解,若受力检测模块110处于机器人末端法兰与外部执行装置之间时,作业操作过程中,受力检测模块110检测得到的受力数据应该是外部执行装置的重力和环境作用力(碰撞力、打磨等时刀具施加的压力)的综合作用结果。则对应地,根据受力数据中的环境作用力的大小,可感知此作用力是否满足作业要求,或者可感知得到此作用力是否会使机器人末端受到损伤;根据受力数据中的环境作用力的方向,可控制作业类型,例如磨削时的正转或反转,或者还可明确此时的方向是否会使碰撞加剧,若会加剧则不执行运动,不会则执行运动,这样在检测到碰撞发生后,并没有禁止所有的运动,与碰撞相反方向的运动仍是被允许的,这也能极大程度的避免机器人受到损伤。
38.控制模块120生成的控制指令可以是用于实现部分末端运动控制的指令,例如当机器人末端安装有夹爪工具实现装配、打磨、铸件以及抛光等作业时,可根据接收到的受力数据,发出控制指令带动夹爪工具夹着工件远离或靠近刀具,以控制装配、打磨、铸件以及抛光等作业过程。控制模块120生成的控制指令也可以是用于实现保护功能的指令,例如当根据受力数据与作业状态数据,发现发生碰撞或无法继续作业时,即可发出控制指令停止运动或往反方向运动,保护机器人末端不受损伤。其中,控制指令是通过输入输出模块130下发指外部执行装置的,可以理解,输入输出模块130是设置于机器人末端的接口装置,可同时实现多路数字量与模拟量的输入输出功能,可用于控制各种外部执行装置,满足各种应用场景需求。
39.控制模块120的实现手段并不唯一,可以是采用现有的控制芯片实现,例如微控制单元(microcontroller unit,mcu)、现场可编程门阵列(fieldprogrammable gate array,fpga)、数字信号处理芯片(digital signal process, dsp),也可是采用搭载控制芯片的数字集成电路实现,不做限定。在本技术实施例中,控制模块120均以采用数字信号处理芯片(dsp芯片)为例进行解释说明。
40.上述机器人的末端控制装置,通过在机器人末端增加控制模块120与输入输出模块130,辅以受力检测模块110实时检测机器人模块的受力数据,控制模块120再根据受力数据直接生成控制指令对外部执行装置进行控制,减少了信息传输的时差与复杂的中间接线,保证机器人在运行过程中的安全性,极大程度地避免了保护功能的失效风险。
41.在一个实施例中,受力检测模块110包括两个以上的力应变检测单元,各力应变检测单元均匀安装于机器人末端的对外作用面。
42.在这里,受力检测模块110采用弹性形变单元设置于机器人末端法兰的对外作用面上,再采集弹性形变单元的受力变形情况的方式实现。对应地,机器人末端的对外作用面上均匀地设置有两个以上的力应变检测单元,力应变检测单元可采集自身弹性部件的形变情况,来反应机器人末端的环境作用力的受力情况。可以理解,对于不同形状与面积的机器人末端的对外作用面来说,力应变检测单元需采用的数量并不相同,均匀设置指的是所采用的力应变检测单元的数量能覆盖完整机器人末端的对外作用面,能全面准确的反应机器人末端的环境作用力的受力情况。
43.例如,如图2所示的一个实施例中,机器人末端的对外作用面呈圆环形,中间孔洞可用于固定外部执行装置。在圆环形的对外作用面上,如图2所示的放置方式均匀设置有六个力应变检测单元,以完成对该机器人末端的环境作用力的受力情况的检测。
44.在一个实施例中,如图3所示,各力应变检测单元均包括力应变检测块111 与检测电路板112,力应变检测块111固定于机器人末端的对外作用面,检测电路板112固定于力应变检测块111,检测电路板112还连接控制装置;力应变检测块111用于在机器人末端的对外作用面受到外力作用时产生形变;检测电路板112用于检测形变,并转化为受力数据发送至控制模块120。可以理解,力应变检测块111即为弹性形变的部分,设置于机器人末端法兰的对外作用面上。而检测电路板112则为采集弹性形变部分的受力变形情况的电路,可根据受力变形情况生成受力数据发送至控制模块120。
45.在一个实施例中,如图4所示,力应变检测块111包括第一弹性形变块1111、第二弹性形变块1112、传力柱1113与力应变测试片1114,第一弹性形变块1111 与第二弹性形变块1112均固定于传力柱1113,力应变测试片1114的一端固定于传力柱1113,且力应变测试片1114设置于第一弹性形变块1111与第二弹性形变块1112之间,力应变测试片1114的另一端设置有背光片1115,第一弹性形变块1111或第二弹性形变块1112固定于机器人末端的对外作用面。
46.具体地,力应变检测块111均由可产生弹性形变的材料制成,类型并不固定,可采用本领域技术人员常用的力应变检测材料实现即可。第一弹性形变块 1111与第二弹性形变块1112均固定于传力柱1113,且第一弹性形变块1111与第二弹性形变块1112呈平行设置。力应变测试片1114的一端也固定于传力柱 1113,设置于第一弹性形变块1111与第二弹性形变块1112之间,且同样与第一弹性形变块1111、第二弹性形变块1112呈平行设置。
47.可以理解,第一弹性形变块1111、第二弹性形变块1112、力应变测试片1114 与传力柱1113为e型结构设置。此e型结构的力应变检测块111可以是整块制成,也可以是分别制成各部件后融合固定成e型结构。在本实施例中,为了力应变检测效果更精准,此e型结构采用整块制成的方式得到,即第一弹性形变块1111与第二弹性形变块1112任一固定于机器人末端的对外作用面且受到环境作用力时,均能通过传力柱1113精准的在力应变测试片1114上产生形变。其中,第一弹性形变块1111与第二弹性形变块1112任一固定于机器人末端的对外作用面后,另一弹性形变块则固定于外部执行装置或用于与外部环境发生接触得到环境作用力。
48.在一个实施例中,如图3与图4所示,检测电路板112上设置有光栅检测芯片1121与
biss-c通讯电路(图中未示出),光栅检测芯片1121与背光片1115 相对设置,光栅检测芯片1121通过biss-c通讯电路连接控制模块120。
49.具体地,光栅检测芯片1121与力应变测试片1114的另一端的背光片1115 相对设置,光栅检测芯片1121可发出测量光束至背光片1115,背光片1115可将测量光束反射回光栅检测芯片1121,以使光栅检测芯片1121根据反射回的测量光束,检测力应变测试片1114是否发生形变,以及分析得到形变量。当力应变检测块111受力,力应变测试片1114发生形变时,光栅检测芯片1121通过测量光栅反射的相干光束检测得到力应变测试片1114的形变量,标定后确定受力大小。同时,在将多个力应变检测块111的受力数据发送至控制模块120后,控制模块120可根据形变的先后顺序确定受力方向。
50.可以理解,在光栅检测芯片1121与背光片1115为相对设置的前提下,检测电路板112可以是固定于第一弹性形变块1111或第二弹性形变块1112上,与第一弹性形变块1111或第二弹性形变块1112具有相同的位姿变化,在分析形变量时也需同时考虑光栅检测芯片1121的位姿变化量。另外,检测电路板112也可以是固定在其他不会有形变的装置上,则分析形变量时无需考虑光栅检测芯片 1121的位姿变化量,上述方式均可实现,不做限定。
51.进一步地,各光栅检测芯片1121检测得到的受力数据均通过biss-c通讯电路所搭载的biss-c串行协议,实时传输至控制模块120进行计算与控制,数据传输高速无时差。
52.在一个实施例中,如图3与5所示,输入输出模块130包括模拟量输入单元131、第一数字量输入单元132与数字量输出单元133,模拟量输入单元131、第一数字量输入单元132与数字量输出单元133均连接控制模块120,第一数字量输入单元132与数字量输出单元133还均连接外部执行装置。
53.具体地,模拟量输入单元131用于实现机器人的电机电参数检测功能等,能够将检测的相关电参数输入至控制模块120,以使控制模块120根据上述电参数判断是否存在过载或超负荷的情况,能有效控制保护机械臂本体的电机、结构等不受损伤。
54.进一步地,第一数字量输入单元132包括多路数字输入通道,可用于将多个外部执行装置的工作状态数据输入至控制模块120。对应地,数字量输出单元 133也包含多路数字量输出通道,可用于控制模块120将控制指令下发至多个外部执行装置。
55.在一个实施例中,输入输出模块130还包括第二数字量输入单元134,第二数字量输入单元134连接数字量输出单元133与控制模块120,第二数字量输入单元134用于将数字量输出单元133输出的控制信号闭环反馈至控制模块120。可以理解,当第二数字量输入单元134有数据输入至控制模块120时,才表征控制信号成功输出至多个外部执行装置了,有利于控制信号的闭环控制,保证信号下发的有效性。
56.此外,如图5所示,控制模块120与输入输出模块130中的第一数字量输入单元132、第二数字量输入单元134以及数字量输出单元133,均采用spi(serialperipheral interface)串行外设接口,在芯片的管脚上只占用四根管脚,节约了芯片的管脚,同时节省板卡空间。
57.在一个实施例中,如图3所示,上述机器人的末端控制装置还包括与控制模块120连接的rs485通信模块140、rs232通信模块150以及ethercat(ethercontrol automation technology,以太网控制自动化技术)通信模块160。在本实施例中,为机器人的末端控制装置集成有多种通信接口,满足不同通信协议的机器人末端连接的外部执行装置的要求。
58.在一个实施例中,如图3所示,上述机器人的末端控制装置还包括电源控制及检测保护模块,电源控制及检测保护模块连接控制模块120与输入输出模块130。可以理解,电源控制及检测保护模块用于监测机器人末端控制装置中的电参数信号是否存在异常,并在发生异常时,例如,电流过流,可以使得控制模块120及时发现,并发出控制信号控制机器人本体及外部执行装置停止运动。
59.在一个实施例中,提供了一种机器人,包括主控装置以及上述的末端控制装置,末端控制装置连接主控装置。可以理解,主控装置可在正常运行时,下发运动控制指令至末端控制装置或者各关节运动模块,以使各关节运动模块相互配合以完成运行控制指令对应运动操作。同时,末端控制装置也可在根据受力数据与作业状态数据分析发生异常情况时,反馈报警信号至主控装置,以使主控装置控制整个机器人停止运行,避免对人员的伤害及贵重设备的损坏。
60.关于上述机器人的具体限定可以参见上文任一实施例中对于机器人的末端控制装置的限定,在此不再赘述。
61.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
62.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1