一种用于冗余机械臂关节的省力驱动机构的制作方法
1.本发明涉及一种用于冗余机械臂关节的省力驱动机构,属于冗余机械臂技术领域。
背景技术:
2.随着科学技术的发展,机器人逐渐代替人类从事一些危险、繁琐的工作,较为常见的有工业机械臂,能提升效率,且在一些场合可避免对人造成危害。
3.常见机械臂包含单关节自由度,总自由度数目有限,同时也限制了机械臂的工作范围和灵活性。结合机械臂与仿生结构,一种冗余机械臂应运而生,采用绳索驱动关节的形式,每个关节具有两个自由度,整个驱动机构与关节部分分体布置,理论上具有无限个自由度,且运动更加灵活,工作范围更广。
4.目前,国内外针对冗余机械臂的研究尚少,国外比较有代表性的研究方为英国oc robotics公司,国内比较有代表性的研究方有新松机器人自动化股份有限公司,主要研究高校有哈尔滨工业大学(深圳)、上海交通大学、浙江大学等。上述公司和研究机构中冗余机械臂采用的主要驱动机构形式为:驱动电机+滚珠丝杠+驱动绳索+关节。当机械臂重量及负载较大时,驱动绳索张力也较大,作用于滚珠丝杠螺母上的倾斜力矩相应增加,影响滚珠丝杠的使用寿命。
技术实现要素:
5.本发明解决的技术问题是:克服现有技术的不足,提出一种用于冗余机械臂关节的省力驱动机构,借鉴省力动滑轮原理,可减少作用于驱动机构的负载力。
6.本发明解决技术的方案是:一种用于冗余机械臂关节的省力驱动机构,该省力驱动机构包括臂杆、n根驱动绳索、关节模块固定板、省力模块、驱动模块、转化模块,n大于等于3;
7.冗余机械臂关节包括两个关节座,分别记为第一关节座、第二关节座,其中第一关节座固定在关节模块固定板上,n根驱动绳索分布在冗余机械臂关节周围,每根驱动绳索一端穿过冗余机械臂关节的第一关节座,固定在第二关节座上,另一端由省力模块牵引;
8.驱动模块用于产生n路旋转动力,转化模块用于将n路旋转动力转换为n路直线动力;省力模块采用n路直线动力分别驱动滑轮,由滑轮带动驱动绳索移动,从而实现所需直线动力为驱动绳索拉力的一半。
9.上述用于冗余机械臂关节的省力驱动机构还包括固定底板,关节模块固定板垂直安装于固定底板上。
10.优选地,所述驱动模块,包括n个驱动子模块和驱动电机固定装置,每个驱动子模块包括驱动电机、联轴器;
11.其中驱动电机固定装置通过螺栓联接的方式垂直固定安装在固定底板上,驱动电机壳体通过螺栓联接的方式与固定底板连接,联轴器的一端连接到驱动电机转轴上,联轴
器的另一端即为驱动模块输出端,用于输出旋转动力。
12.优选地,所述转化模块包括丝杠左固定板、丝杠右固定板和n个转化子模块,每个转化子模块包括行星滚柱丝杠、螺母块、导轨;
13.丝杠左固定板通过螺栓联接的方式垂直固定到固定底板上,丝杠右固定板通过螺栓联接的方式固定到固定底板上,导轨两端分别与丝杠左固定板和丝杠右固定板固定连接,行星滚柱丝杠与导轨平行,行星滚柱丝杠的两端分别通过轴承与丝杠左固定板和丝杠右固定板连接,螺母块穿过行星滚柱丝杠、导轨,能够沿导轨移动,行星滚柱丝杠与驱动模块输出端连接,行星滚柱丝杠旋转运动驱动螺母块沿直线运动。
14.优选地,所述省力模块包括n个省力子模块,每个省力子模块包括滑轮绳索、滑轨、滑轮、绳索连接块,其中滑轮绳索的一端与螺母块连接,绕过滑轮另一端固定到丝杠右固定板,滑轨两端通过螺栓联接的方式分别与丝杠右固定板和关节模块固定板连接,滑轨上开有滑槽,滑轮和绳索连接块通过销轴串联起来,销轴的一端处于滑槽内。
15.优选地,所述臂杆为“h”形结构,两侧为带有通孔的平板,中间为中空圆柱体,驱动绳索依次穿过关节模块固定板、臂杆两侧平板的通孔、第一关节座、再与第二关节座连接。
16.优选地,n根驱动绳索均匀分布在冗余机械臂关节周围。
17.本发明与现有技术相比的有益效果是:
18.(1)、相比应用于冗余机械臂中常见的驱动机构,本发明由于采用省力模块,减少了作用于驱动机构的负载力。
19.(2)、本发明通过减少驱动机构承受的负载力,减弱了转化模块中螺母承受的倾斜力矩。
20.(3)、本发明通过减弱转化模块中螺母承受的倾斜力矩,减缓了丝杠的寿命下降速度,提高了驱动机构的使用寿命。
21.(4)、本发明采用省力模块使得驱动丝杠旋转运动所需要的力减小,驱动电机的负载减小。
22.(5)、本发明省力模块为可拆卸模块,可根据实际需求拆装,且拆装方便,拆装前后不影响冗余机械臂的使用。
附图说明
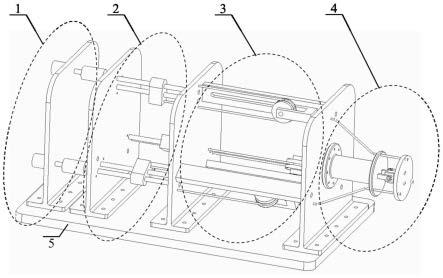
23.图1为本发明实施例冗余机械臂省力驱动机构方案原理图。
24.图2为本发明实施例驱动模块结构图;
25.图3为本发明实施例转化模块结构图;
26.图4为本发明实施例省力模块结构图;
27.图5为本发明实施例关节模块结构图;
28.图6为本发明实施例关节结构图;
29.图7为本发明实施例关节座结构图;
30.图8为本发明实施例中心块结构图。
具体实施方式
31.下面结合实施例对本发明作进一步阐述。
32.本发明提供了一种用于冗余机械臂关节的省力驱动机构,其特征在于包括臂杆、n根驱动绳索、关节模块固定板、省力模块、驱动模块、转化模块,n大于等于3;
33.冗余机械臂关节包括两个关节座,分别记为第一关节座、第二关节座,其中第一关节座固定在关节模块固定板上,n根驱动绳索分布在冗余机械臂关节周围,每根驱动绳索一端穿过冗余机械臂关节的第一关节座,固定在第二关节座上,另一端由省力模块牵引;
34.驱动模块用于产生n路旋转动力,转化模块用于将n路旋转动力转换为n路直线动力;省力模块采用n路直线动力分别驱动滑轮,由滑轮带动驱动绳索移动,从而实现所需直线动力为驱动绳索拉力的一半。上述用于冗余机械臂关节的省力驱动机构,还包括固定底板5,关节模块固定板垂直安装于固定底板5上。
35.优选地,所述驱动模块1,包括n个驱动子模块和驱动电机固定装置1-3,每个驱动子模块包括驱动电机1-1、联轴器1-2;
36.其中驱动电机固定装置1-3通过螺栓联接的方式垂直固定安装在固定底板5上,驱动电机1-1壳体通过螺栓联接的方式与固定底板5连接,联轴器1-2的一端连接到驱动电机转轴1-1上,联轴器1-2的另一端即为驱动模块1输出端,用于输出旋转动力。
37.优选地,所述转化模块2包括丝杠左固定板、丝杠右固定板和n个转化子模块,每个转化子模块包括行星滚柱丝杠、螺母块、导轨;
38.丝杠左固定板通过螺栓联接的方式垂直固定到固定底板上,丝杠右固定板通过螺栓联接的方式固定到固定底板上,导轨两端分别与丝杠左固定板和丝杠右固定板固定连接,行星滚柱丝杠与导轨平行,行星滚柱丝杠的两端分别通过轴承与丝杠左固定板和丝杠右固定板连接,螺母块穿过行星滚柱丝杠、导轨,能够沿导轨移动,行星滚柱丝杠与驱动模块1输出端连接,行星滚柱丝杠旋转运动驱动螺母块沿直线运动。
39.优选地,所述省力模块包括n个省力子模块,每个省力子模块包括滑轮绳索、滑轨、滑轮、绳索连接块,其中滑轮绳索的一端与螺母块连接,绕过滑轮另一端固定到丝杠右固定板,滑轨两端通过螺栓联接的方式分别与丝杠右固定板和关节模块固定板连接,滑轨上开有滑槽,滑轮和绳索连接块通过销轴串联起来,销轴的一端处于滑槽内。
40.优选地,所述臂杆为“h”形结构,两侧为带有通孔的平板,中间为中空圆柱体,驱动绳索依次穿过关节模块固定板、臂杆两侧平板的通孔、第一关节座、再与第二关节座连接。
41.优选地,n根驱动绳索均匀分布在冗余机械臂关节周围。
42.本发明减少了作用于冗余机械臂驱动机构的负载力,且基础技术较成熟,易实现。
43.实施例1:
44.如图1所示,本发明某一具体实施例中,驱动机构主要由驱动模块1、转化模块2、省力模块3、关节模块4、固定底板5组成,驱动模块1提供动力,转化模块2将旋转运动转换为直线运动、省力模块3将转化模块2与关节模块4联接。
45.图2所示为驱动模块1,包括驱动电机固定装置1-3和n个驱动子模块,每个驱动子模块包括驱动电机1-1、联轴器1-2,其中,驱动电机固定装置1-3通过螺栓联接的方式固定到固定底板5上,驱动电机1-1的壳体通过螺栓联接的方式与固定底板5连接,联轴器1-2的一端连接到驱动电机1-1的转轴上,且驱动模块1中至少包含3个驱动电机1-1和3个联轴器1-2,3个驱动电机1-1和3个联轴器1-2都为120度圆周均匀分布。
46.图3所示为转化模块2,转化模块2包括丝杠左固定板2-1、丝杠右固定板2-5和n个
转化子模块,每个转化子模块包括行星滚柱丝杠2-2、螺母块2-3、导轨2-4,其中丝杠左固定板2-1通过螺栓联接的方式固定到固定底板5上,行星滚柱丝杠2-2的两端分别通过轴承与丝杠左固定板2-1和丝杠右固定板2-5连接,螺母块2-3中通过行星滚柱丝杠2-2、导轨2-4,并作为图4中滑轮绳索3-1的一固定端,丝杠右固定板2-5通过螺栓联接的方式固定到固定底板5上。且转化模块2中至少包含3个行星滚柱丝杠2-2、螺母块2-3和导轨2-4,3个行星滚柱丝杠2-2、螺母块2-3和导轨2-4都为120度圆周均匀分布。
47.图4所示为省力模块3,省力模块3包括n个省力子模块,每个省力子模块包括滑轮绳索3-1、滑轨3-2、滑轮3-3、绳索连接块3-4,其中滑轮绳索3-1的一端与螺母块2-3连接,绕过滑轮3-3另一端固定到丝杠右固定板2-5,滑轨3-2两端通过螺栓联接的方式分别与丝杠右固定板2-5和关节模块固定板4-3连接,滑轨3-2上开有滑槽,滑轮3-3和绳索连接块3-4通过销轴串联起来,销轴的一端处于滑槽内。且省力模块3中至少包含3个滑轮绳索3-1、滑轨3-2、滑轮3-3和绳索连接块3-4,3个滑轮绳索3-1、滑轨3-2、滑轮3-3和绳索连接块3-4都为120度圆周均匀分布。
48.图5所示为关节模块4,包括臂杆4-1、驱动绳索4-2、关节模块固定板4-3、关节4-4。其中关节模块固定板4-3通过螺栓联接的方式固定到固定底板5上,臂杆4-1通过螺栓联接的方式固定到关节模块固定板4-3上,关节4-4与臂杆4-1通过螺栓联接,驱动绳索4-2一端与绳索连接块3-4连接,然后穿过关节模块固定板4-3、臂杆4-1、关节4-4上的绳孔,另一端固定到关节4-4的末端。且关节模块4中至少包含1个臂杆4-1、3根驱动绳索4-2、1个关节4-4,3根驱动绳索4-2为120度圆周均匀分布。
49.图6所示为关节4-4,包括关节座4-4-1、中心块4-4-2、铜套4-4-3,关节座4-4-1和中心块4-4-2分别如图7和图8所示。
50.关节4-4中的关节座4-4-1的数量为2,且两关节座正交分布,两关节座通过中心块4-4-2和铜套4-4-3连接,其中中心块4-4-2端面的1个轴对应关节座4-4-1的1个孔,孔与轴之间通过铜套4-4-3连接,实现轴的旋转运动。具体为:关节座4-4-1包括一个平板和两个垂直于平板一侧的支柱,支柱的端部为c型接口,中心块4-4-2为立方块,立方块的中间四个面,每个面中心向外突出一轴,相对的两个轴为一组,该组轴与关节座两个支柱上的c型接口配合连接,由两个支柱上的c型接口分别握住相对的两个轴,并且能够绕轴旋转。
51.工作原理如下:驱动电机1-1通过联轴器1-2带动行星滚柱丝杠2-2中的主丝杠旋转,主丝杠的旋转运动转化为螺母块2-3的直线运动,螺母块2-3的直线运动带动滑轮绳索3-1移动,使得滑轮3-3和绳索连接块3-4共同沿着滑轨3-2移动,进一步驱动驱动绳索4-2,三根驱动绳索4-2驱动关节4-4实现既定动作。在上述运动过程中,由于采用了省力模块3,使得滑轮绳索3-1受到的拉力理论上等于驱动绳索4-2中的一半拉力,最终作用到螺母块2-3上的倾斜力矩减少了一半,驱动行星滚柱丝杠2-2中主丝杠旋转所需要的力也减少了一半,达到了省力驱动的目的。
52.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1