基于折纸原理的可折展连续体飞行操作机械臂及飞行器
1.本发明涉及机械臂技术领域,尤其是指一种基于折纸原理的可折展连续体飞行操作机械臂及飞行器。
背景技术:
2.随着科学技术的不断发展,无人机已被广泛应用于城市管理、农业、地质、气象、电力、抢险救灾、视频拍摄等行业。然而,单纯的无人机难以胜任诸如飞行抓取类复杂的、需要主动操作的任务。近年来,科研人员尝试将机械臂安装在飞行器上,构成飞行机械臂系统。此举措极大地拓展了机器人的工作范围和灵活性,丰富了作业类型,因而具有广泛的应用前景。
3.从机械臂结构种类来看,飞行机械臂可分为关节型飞行机械臂和连续体型飞行机械臂。现有飞行机械臂基本都是关节型的,其具有成本低廉、结构简单、工作范围大等优点,相关研究较为丰富。然而,上述串联型飞行机械臂系统仅能执行一些诸如飞行抓取、移动轻质量物体之类简单的任务,且存在载荷能力低、精度较低、运行速度慢、无人机平衡困难等缺点,因而限制了其在需要向外界提供较大的力或力矩的场合中的应用。
4.大多数无人机的应用和研究都基于观测和巡逻方面,缺少与环境的交互作业。为满足狭小空间或恶劣环境的作业要求,对工作空间复杂、轻量化、柔顺性、可伸缩、变刚度和一定的负载能力等方面的作业需求,提出了基于折纸原理的可折展连续体飞行操作机械臂。结合旋翼飞行器的空中运动控制、悬停性能以及机械臂的可操作性,组成旋翼飞行机械臂,以此实现空中作业。可折展机构与无人机结合可以帮助机器人或机构进入狭窄复杂的空间来克服体积问题。
5.但是,现有的飞行操作机械臂能耗较高、负载能力较小,难以实现轻量化;并且,在加上作业装置之后,容易降低飞行器的稳定性;同时飞行操作机械臂自由度较少,无法实现复杂环境的作业工作。
6.具体地:
7.针对中国发明专利(cn112621736a),该发明由多个驱动关节在刚性主骨架及柔性副骨架上并联而成,由于内部刚性主骨架,使得连续体机构具有一定的抗扭刚度,但是在弯曲能力上存在一定的不足;且无法实现伸缩自由度,本体只能实现弯曲变形,而长度无法改变。
8.针对中国发明专利(cn105729498b),该发明中4个模块化单体组成一个机械臂节,每个模块化单体由于其结构不同完成其刚性、弯曲等不同单一的功能,无法将柔性弯曲及刚性支撑集成在同一模块化单体上,会极大地增加机械臂节结构的复杂性;且由于模块结构的复杂性,无法实现伸缩自由度。
9.参考论文“an origami-inspired,self-locking robotic arm that can be folded flat”,该设计中飞行操作机械臂依靠折纸垂直折叠原理的仅能实现结构上的收缩,通过锁止机构来实现连续体机械臂的高刚度和负载能力,然而这种以损失弯曲性为代
价换回机构的良好的伸缩特性和优异的负载能力的设计完全丧失了连续体的弯曲性能。
10.综上所述:现有的飞行操作机械臂无法实现兼具抗扭刚度与弯曲能力,且无法实现伸缩自由度,本体只能实现弯曲变形,而长度无法改变;亦或者无法将柔性弯曲及刚性支撑集成在同一模块化单体上,从而造成机械臂模块结构复杂、体积庞大、无法收缩。
技术实现要素:
11.针对现有技术的不足,本发明公开了一种基于折纸原理的可折展连续体飞行操作机械臂及飞行器。
12.本发明所采用的技术方案如下:
13.一种基于折纸原理的可折展连续体飞行操作机械臂,包括:
14.折纸主体机构,包括多个串联连接的折纸模块,所述折纸模块包括底板和至少一个自身可折叠的折纸组件,所述底板开设主过线孔和至少一组通孔;所述折纸组件设置多个铰接部,且所述铰接部设置中空轴;
15.线绳驱动机构,包括驱动模块和线绳单元,所述线绳单元包括主线绳和副线绳,所述主线绳穿过所述主过线孔和所述驱动模块连接,所述副线绳穿过所述通孔和所述主线绳固连,当所述驱动模块收卷或放卷所述主线绳,控制通过所述折纸组件伸缩,从而控制所述折纸模块多个自由度的运动,实现所述折纸模块不同状态下的弯曲角度及位姿;
16.自锁机构,设置在所述折纸组件上;其包括至少一个自锁模块,所述自锁模块包括设置在所述中空轴内的双程sma杆连接轴主体,所述双程sma杆连接轴主体可通电或断电,使所述折纸组件锁定或解锁。
17.其进一步的技术特征在于:所述折纸组件包括铰链侧板组件和滚动侧板组件,所述铰链侧板组件包括一组大侧板,所述滚动侧板组件包括固定块、一组第一小侧板和一组第二小侧板;所述大侧板、所述第一小侧板和所述第二小侧板围绕中心顶点设置;所述大侧板和所述底板通过第一连接轴连接;所述大侧板和所述第一小侧板之间及所述大侧板和所述第二小侧板之间通过第二连接轴连接;所述第一小侧板和所述固定块之间及所述第二小侧板和所述固定块之间通过第三连接轴连接;并且,所述第一连接轴、所述第二连接轴、所述第三连接轴的轴线相交于中心顶点。
18.其进一步的技术特征在于:一组所述大侧板呈对称设置。
19.其进一步的技术特征在于:所述第一小侧板和所述第二小侧板的形状和尺寸均相同,且所述第一小侧板和所述第二小侧板呈对称设置。
20.其进一步的技术特征在于:所述驱动模块包括电机和绕线轮,所述电机的输出端连接所述绕线轮,所述绕线轮收放所述线绳单元。
21.其进一步的技术特征在于:还包括倾角控制模块,所述倾角控制模块包括至少一个倾斜角度传感器,所述倾斜角度传感器固定在所述底板上,所述倾斜角度传感器实时反馈各折纸模块的弯曲角度。
22.其进一步的技术特征在于:所述倾角控制模块还包括控制盒,所述倾斜角度传感器设置在所述控制盒内,所述控制盒和所述底板集成为一体。
23.其进一步的技术特征在于:还包括弹性支撑机构,所述弹性支撑机构包括多个弹性元件,所述弹性元件和所述底板固连。
24.其进一步的技术特征在于:所述弹性元件为扭簧。
25.一种飞行器,包括旋翼飞行机器人主体,所述旋翼飞行机器人主体连接如上述所述的基于折纸原理的可折展连续体飞行操作机械臂。
26.本发明的上述技术方案相比现有技术具有以下优点:
27.1、本发明采用一种基于折纸原理的可折展连续体飞行操作机械臂及铰链干涉消除的设计方法,通过线绳驱动折纸单元的形变和刚度以实现机械臂的连续运动及伸缩运动。由于折纸机构选用轻且高硬度的复合材料,易于实现轻量化,同时可以有效控制各单元的弯曲角度及机构的最大弯曲角度。本发明具有结构简单稳定、行动灵活、完全伸缩、弯曲特性、抗弯曲能力、负载能力等特点。
28.2、本发明所涉及的可折展连续体飞行操作机械臂解决了现有的飞行操作机械臂结构尺寸大、拥有的自由度数目相对较少、负载能力较小、难以实现轻量化的难题,基于线绳驱动方式,以及多传感器构成的一个多层预制体模块,释放了工作空间以及环境。
29.3、本发明所涉及的可折展连续体飞行操作机械臂解决了现有的飞行操作机械臂不具备伸缩特性的问题,传统的飞行操作机械臂大多从弯曲性进行研究,但针对一些复杂环境,常常需要机构具有一定的伸缩特性,本发明引入了折纸技术并设计了一种可伸缩的外壳,实现了整体机构的伸缩特性,极大地压缩了连续体机构的体积。
30.4、本发明所涉及的可折展连续体飞行操作机械臂解决了现有的飞行操作机械臂无法完全伸缩的问题,传统的飞行操作机械臂大多因为铰链连接存在一定的干涉,从而导致整体机构的伸缩性具有局限性,本发明引入了滚动式折纸连接与铰链式折纸连接双折展技术,设计了一种可完全伸展-折叠的飞行操作机械臂。
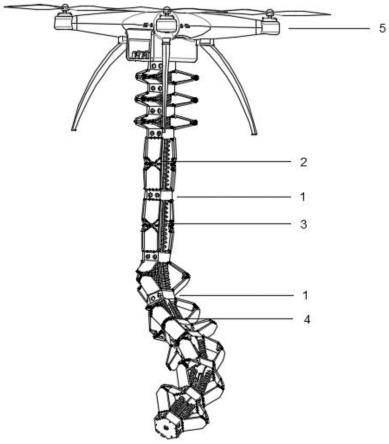
31.5、本发明所涉及的可折展连续体飞行操作机械臂采用自锁模块解决了现有的飞行操作机械臂中负载能力与弯曲性无法兼具的问题,通过折纸模块各侧面不同状态下弯曲角度的差异从而实现了连续体飞行操作机械臂的弯曲性,再通过自锁模块对折纸机构的限制来实现连续体飞行操作机械臂优异的负载能力。
32.6、本发明所涉及的可折展连续体飞行操作机械臂采用线绳驱动模块解决了现有的飞行操作机械臂结构复杂、无法有效控制机构位置的问题,通过折纸技术将机构简单化并具有弯曲性,再通过线绳驱动来实现单模块的角度精确控制,从而实现整体机构的弯曲角度控制,以此达到连续体飞行操作机械臂位置的精准控制。
附图说明
33.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明。
34.图1是本发明中基于折纸原理的可折展连续体飞行操作机械臂的结构示意图。
35.图2为本发明的一段飞行操作机械臂的结构示意图。
36.图3为本发明中一个折展模块的结构示意图。
37.图4为本发明中一个折纸模块的结构示意图。
38.图5为本发明中一个底板的结构示意图。
39.图6为本发明中一个侧板的结构示意图。
40.图7为本发明中一个滚动侧板的结构示意图。
41.图8为本发明中一个倾角控制模块的结构示意图。
42.图9为本发明中一个线绳单元的结构示意图。
43.图10为本发明中一个驱动模块的结构示意图。
44.图11为本发明中一个弹性支撑模块的结构示意图。
45.图12为本发明中一个自锁模块的结构示意图。
46.图13为本发明可折展连续体飞行操作机械臂折叠的结构示意图。
47.图14为本发明中一个折展模块完全折叠的结构示意图。
48.图15为本发明可折展连续体飞行操作机械臂伸张的结构示意图。
49.图16为本发明中一个折展模块完全展开的结构示意图。
50.说明书附图标记说明:1、折纸主体机构;11、折纸模块;111、底板;1111、主过线孔;1112、第一通孔;1113、第二通孔;112、铰链侧板组件;1121、大侧板;1122、第一连接轴;1123、第二连接轴;113、滚动侧板组件;1131、第一小侧板;1132、第二小侧板;1133、固定块;1134、第三连接轴;12、倾角控制模块;121、控制盒;122、倾斜角度传感器;123、第一固定元件;2、线绳驱动机构;21、线绳单元;211、主线绳;212、副线绳;22、驱动模块;221、电机;222、电机固定支架;223、联轴器;224、绕线轮;225、绕线轮固定支架;226、第二固定元件;3、弹性支撑机构;31、弹性元件;4、自锁机构;41、自锁模块;411、双程sma杆连接轴主体;412、电源正极接线柱;413、电源负极接线柱;5、旋翼飞行机器人主体。
具体实施方式
51.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
52.关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明,此外,在全部实施例中,相同的附图标号表示相同的元件。
53.实施例1:
54.结合图1-图4,一种基于折纸原理的可折展连续体飞行操作机械臂,包括:
55.折纸主体机构1,包括多个串联连接的折纸模块11,折纸模块11包括底板111和至少一个可自身折叠的折纸组件,底板111开设主过线孔1111和至少一组通孔;折纸组件设置多个铰接部,且铰接部设置中空轴;
56.线绳驱动机构2,包括驱动模块22和线绳单元21,线绳单元21包括主线绳211和副线绳212,主线绳211穿过主过线孔1111和驱动模块22连接,副线绳212穿过通孔和主线绳211固连,当驱动模块22收卷或放卷主线绳211,控制通过折纸组件伸缩,从而控制折纸模块11多个自由度的运动,实现折纸模块11不同状态下的弯曲角度及位姿。
57.自锁机构4,设置在折纸组件上。其包括至少一个自锁模块41,自锁模块41包括设置在中空轴内的双程sma杆连接轴主体411,双程sma杆连接轴主体411可通电或断电,使折纸组件锁定或解锁。
58.上述提供了一种基于折纸原理的可折展连续体飞行操作机械臂,解决现有的飞行操作机械臂无法实现兼具抗扭刚度与弯曲能力,且无法实现伸缩自由度,本体只能实现弯
曲变形,而长度无法改变;亦或者无法将柔性弯曲及刚性支撑集成在同一模块化单体上,从而造成机械臂模块结构复杂、体积庞大、无法收缩的问题。
59.结合图5-图7,在本实施例中,折纸组件包括铰链侧板组件112和滚动侧板组件113,铰链侧板组件112包括一组大侧板1121,滚动侧板组件113包括固定块1133、一组第一小侧板1131和一组第二小侧板1132。大侧板1121、第一小侧板1131和第二小侧板1132围绕中心顶点设置。大侧板1121和底板111通过第一连接轴1122连接。大侧板1121和第一小侧板1131之间及大侧板1121和第二小侧板1132之间通过第二连接轴1123连接。第一小侧板1131和固定块1133之间及第二小侧板1132和固定块1133之间通过第三连接轴1134连接。并且,第一连接轴1122、第二连接轴1123、第三连接轴1134的轴线相交于中心顶点。
60.优选地,一组大侧板1121呈对称设置。
61.优选地,第一小侧板1131和第二小侧板1132的形状和尺寸均相同,且第一小侧板1131和第二小侧板1132呈对称设置。
62.如图8所示,在本实施例中,基于折纸原理的可折展连续体飞行操作机械臂还包括倾角控制模块12,倾角控制模块12包括至少一个倾斜角度传感器122,倾斜角度传感器122固定在底板111上,倾斜角度传感器122实时反馈各折纸模块的弯曲角度。
63.倾角控制模块12还包括控制盒121,倾斜角度传感器122设置在控制盒121内,控制盒121和底板111集成为一体。倾斜角度传感器122通过第一固定元件123固定在折纸模块底板111上。具体地,第一固定元件123为螺栓。
64.结合图9和图10,在本实施例中,驱动模块22包括电机221和绕线轮224,电机221的输出端连接绕线轮224,绕线轮224收放线绳单元21。其中,副线绳212的上端与底板固连,第一通孔1112半径小于主线绳211半径,从而对主线绳211进行限位,驱动模块22通过主线绳211拉动副线绳212从而带动折纸模块的伸缩。每个折纸模块由三个电机221控制,从而实现折纸模块不同状态下的弯曲角度及位姿。
65.如图11所示,在本实施例中,基于折纸原理的可折展连续体飞行操作机械臂还包括弹性支撑机构3,弹性支撑机构3包括多个弹性元件31,弹性元件31和底板111固连。优选地,弹性元件31为扭簧。弹性元件31通过第二通孔1113与底板1111固连。
66.如图12所示,在本实施例中,双程sma杆连接轴主体411设置在第一连接轴1122内,不占据铰链侧板组件112和滚动侧板组件113的空间,降低装配难度和成本。双程sma杆连接轴主体411的一端设有电源正极接线柱412,双程sma杆连接轴主体411的另一端设有电源负极接线柱413。
67.双程sma杆连接轴主体411使底板111与大侧板1121固连,电源正极接线柱412经控制开关和通电导线与电源正极连接,电源负极接线柱413经通电导线与电源负极连接。
68.本实施例基于自锁杆模块41,在电源控制开关闭合,通电情况下,双程sma杆连接轴主体411受热膨胀变形,使双程sma杆连接轴主体411与连接孔之间的摩擦力增大,将多个大侧板1121与控制盒121和底板111与大侧板1121底端状态及角度固定。由于折纸模块侧面结构的对称性,折纸模块侧面将被固定,以此实现折纸模块11的固定,从而实现连续体机构的高负载能力。
69.在电源控制开关断开,断电情况下,双程sma杆连接轴主体411恢复到原来的状态,使其能够进行相对转动,实现对位姿的调整。
70.本实施例的工作原理如下:
71.在一个折纸模块中,驱动模块22通过电机221带动绕线轮224转动,使缠绕其上的主线绳211经主过线孔1111带动副线绳212的缩放,以实现折纸模块11的折展弯曲。副线绳212上端与底板固连,第一通孔1112半径小于主线绳211半径,从而对主线绳211进行限位,保证在折纸模块自重下绳始终保持张紧状态。
72.驱动模块22通过多个电机221控制多个折纸模块11的多个主线绳211与副线绳212的收缩,以此实现连续体飞行操作臂基于各折纸模块多曲率弯曲与完全伸展-折叠的功能。
73.在此基础上,倾斜角度传感器122可以实时反馈各折纸模块的弯曲角度,进而可以实现对各折纸模块与整体机构的精准角度控制。
74.实施例2:
75.结合图13和图14,基于折纸原理的可折展连续体飞行操作机械臂为完全折叠状态,即驱动模块22通过多个电机221控制多个折纸模块11的多个主线绳211与副线绳212收卷,并且自锁模块41不通电,解除多个大侧板1121与控制盒121和底板111与大侧板1121的底部状态及角度固定。
76.实施例3:
77.结合图15和图16,基于实施例1,基于折纸原理的可折展连续体飞行操作机械臂为完全伸张状态,即驱动模块22通过多个电机221控制多个折纸模块11的多个主线绳211与副线绳212放卷,并且自锁模块41不通电,解除多个大侧板1121与控制盒121和底板111与大侧板1121的底部状态及角度固定。
78.实施例4:
79.一种飞行器,包括旋翼飞行机器人主体5,旋翼飞行机器人主体5连接如实施例1提供的基于折纸原理的可折展连续体飞行操作机械臂。
80.在本实施例中,电机221经电机固定支架222通过第二固定元件226固定在旋翼飞行机器人主体5上,绕线轮224经绕线轮固定支架225通过第二固定元件226固定在旋翼飞行机器人5上,电机221的输出端通过联轴器223与绕线轮224的轴相连。具体地,第二固定元件226为螺栓。
81.在本发明实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
82.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1