基于自适应非线性并联弹性驱动器的踝关节助力外骨骼及其控制方法
1.本发明涉及外骨骼机器人领域,具体涉及一种基于自适应非线性并联弹性驱动器的踝关节助力外骨骼及其控制方法。
背景技术:
2.行走是人类正常生活中必然需要的一项运动。人类在行走这项运动上所消耗的能量要远高于其他运动所消耗的能量。而下肢是支持人类正常行走的关键,人类的机动性很大程度上依赖于人的下肢。虽然在现代社会有了例如自行车、汽车、火车等交通工具可以帮助人类进行出行,但在一些拥挤的城市或崎岖复杂的地形中,步行仍然是人类最有效的移动方式。因为轮式车辆等交通工具往往只能在特定的平坦道路上工作。对于一些从事负功工作与特殊行业的人员,助力行走的重要性更加显著。例如需要穿戴沉重专业设备进行危险工作的消防员、工矿产业中需要经常搬运重物行走的产业工人、经常需要携带大量专业物资设备进行长途跋涉的军人。给他们佩戴可以助力行走的设备不仅可以提高他们的工作效率、更可以让他们的生命安全得到进一步保障。对于下肢踝关节处肌肉肌无力的病人或下肢踝关节受损的患者甚至肌肉退化严重的部分老年人,独自完成行走这一基本任务是困难的,这对他们的正常生活造成了极大的困扰。开发可以辅助行走的设备有助于提高这些特殊群体的基本生活水平。因次,长期以来,研究人员都一直致力于开发下肢外骨骼来辅助人类行走并改善人类的步行效率以显著扩大人类的活动范围、提高人类工作效率、改善病人步行质量并帮助老年人正常行走。
3.在人体下肢中,踝关节对人类步行的贡献尤其突出。踝关节为正常步态周期中的人体提供了超过50%的腿部的总正功。目前,国外研究机构所研发的踝关节助力外骨骼主要可分为主动式和被动式两类。被动式踝关节助力外骨骼无驱动器,主要依靠弹性元件模仿人类肌肉肌腱的收缩与释放来给关节施加辅助力矩,从而达到辅助踝关节的目的。但这种外骨骼能够施加在踝关节上的辅助力矩大小较小,对人体步行的助力效果很有限。主动式踝关节助力外骨骼主要由驱动器作为动力元件。相较被动式外骨骼,主动式外骨骼能提供更大的辅助力矩,能显著降低人类步行中的代谢消耗。对于主动式外骨骼来说,驱动器的性能很大程度上决定了外骨骼对人体的辅助效果。电机、气缸、人工肌肉都是可以作为外骨骼驱动器的元件,但采用气缸和人工肌肉的外骨骼往往难以精确控制其施加在人体的力矩大小,容易对人体关节产生损伤。单纯采用电机的外骨骼虽然可以精确控制力矩大小,但难以在大功率和低质量之间进行平衡。若采用小功率电机,则输出力矩较小,助力效果不显著,若采用大功率电机,则整个外骨骼过大的重量和体积给长时间佩戴带来不便;使用将弹性元件与电机串联所组成的串联弹性驱动器的外骨骼虽然在一定程度上提高了驱动器的峰值功率,但却难以有效的降低驱动器对电机的扭矩需求,这给外骨骼的续航带来了更大的挑战;而将弹性元件与电机并联所组成的并联弹性驱动器可以有效的改善驱动器的能量效率并降低驱动器对电机扭矩的需求。在特定环境下定制化设计,可以实现以较小功率的电
机实现较大功率的驱动器功率输出;对踝关节外骨骼而言,还有一项挑战。由于不同的佩戴者其体重与负重的总重量不同,导致其所需的踝关节助力力矩的大小不同,以单一较小功率的电机实现针对不同总重量的佩戴者进行自适应助力仍然是一项难题。
4.因此,设计一款可以有效助力人体踝关节的外骨骼对提高人类步行经济性有显著作用。
技术实现要素:
5.本发明的目的在于提供一种基于自适应非线性并联弹性驱动器的踝关节助力外骨骼,该外骨骼针对踝关节的生物力学性能进行特化设计,以实现用较小功率的电机实现较大的驱动器整体力矩输出,使其更加节能以获得更好的续航能力,并在不改变电机功率的情况下自适应的针对不同穿戴者实现不同大小的输出力矩以达到更优的助力效果。
6.为实现上述目的,本发明采用了以下技术方案:包括固定在人体腰部的驱动装置以及固定在小腿与足部的踝关节执行装置,所述的驱动装置与踝关节执行装置通过鲍登线连接并实现传动;所述的驱动装置包括腰部固定板,所述的腰部固定板通过柔性绑带固定在腰间,所述的腰部固定板上设有水平方向布置的第一主轴,所述的第一主轴上同轴固定有第一滑轮与第一锥齿轮,所述的第一锥齿轮依次通过第二锥齿轮、力矩传感器与驱动电机相连,所述的驱动装置还包括凸轮机构以及变刚度机构,所述的变刚度机构包括竖直方向设置的导轨、呈上下方向设置在导轨上的第一滑板及第二滑板、设置在第一滑板及第二滑板之间的并联弹簧以及与第一滑板相连的调节电机,所述的并联弹簧为刚度固定的线性弹簧,所述的凸轮机构包括固定在第一主轴上的凸轮以及固定在第二滑板底部的滚子;所述的踝关节执行装置包括竖直方向设置的小腿板、固定在小腿板上的小腿支架、与小腿板转动连接的踝板以及固定在踝板上的足部支架,还包括水平设置的第二主轴,所述的第二主轴通过一对轴承安装于小腿板与小腿板固定轴承座之间并形成转动副,所述的小腿板固定轴承座与小腿板螺栓连接,所述的第二主轴上同轴固定有第二滑轮及踝板,所述第二主轴远离小腿板的一端设有电位计,所述的足部支架上设有与人体足部脚尖位置相对应的第一压力传感器以及与人体足部脚跟位置相对应的第二压力传感器;所述的鲍登线连接第一滑轮及第二滑轮,所述的第一滑轮与第二滑轮同步转动且转向相反。
7.所述的导轨包括平行布置的第一导轨和第二导轨,所述第一滑板的两端分别通过第一滑块与第一导轨、第二导轨形成滑动配合,所述第二滑板的两端分别通过第二滑块与第一导轨、第二导轨形成滑动配合,所述的第一导轨与第二导轨分别通过导轨固定架与腰部固定板连接,所述的调节电机位于第一滑板的上方,且调节电机通过电机固定板安装在腰部固定板上,所述调节电机的输出轴为螺纹轴,所述的第一滑板上设有与调节电机的输出轴形成螺纹螺杆传动的螺纹孔,所述第一滑板与第二滑板相靠近的板面分别设有轴线相吻合的第一弹簧定位座与第二弹簧定位座,所述并联弹簧的两端分别抵靠在第一滑板与第二滑板的板面上。
8.所述的驱动电机通过驱动电机座固定在腰部固定板上,所述驱动电机的输出轴与力矩传感器固连,所述力矩传感器的输出轴与第二锥齿轮同轴固连,所述力矩传感器的输
出轴通过轴承与力矩传感器轴承座相配合形成转动副,所述的力矩传感器轴承座固定在腰部固定板上,所述驱动电机的输出轴、力矩传感器、第二锥齿轮同轴设置且同步转动。
9.所述的第一主轴通过一对轴承安装于第一轴承座与第二轴承座之间并形成转动副,所述的凸轮、第一滑轮、第一锥齿轮与第一主轴同轴固定且同步转动,所述的第一轴承座及第二轴承座均与腰部固定板相连;所述的滚子通过一对轴承安装于第三轴承座与第四轴承座之间并形成转动副,所述的第三轴承座与第四轴承座固定在第二滑板的底面。
10.所述的鲍登线包括第一鲍登线及第二鲍登线,所述第一鲍登线及第二鲍登线的两端均分别与第一滑轮和第二滑轮固连,所述的腰部固定板上还设有第一鲍登线固定板,所述的小腿板固定轴承座上设有第二鲍登线固定板,所述的第一鲍登线固定板与第二鲍登线固定板用于固定第一鲍登线及第二鲍登线中的外套。
11.所述的腰部固定板上还设有控制器及供电电池,所述的电位计、第一压力传感器、第二压力传感器、驱动电机、调节电机分别与控制器相连。
12.由上述技术方案可知,本发明可以精确识别出人体实时步态状况与当前佩戴者及自身负重之和的总重量,根据当前的总重量从一定程度上调整输出力矩曲线的大小,根据人体实时步态来实现零力矩控制或对踝关节施加相应的辅助力矩,达到更优的助力效果。
13.本发明的另一目的在于提供一种基于自适应非线性并联弹性驱动器的踝关节助力外骨骼的控制方法,包括如下步骤:步骤1:佩戴者穿戴外骨骼,控制器开始工作,进行系统初始化;步骤2:第一压力传感器及第二压力传感器将佩戴者与自身负重之和的总重量以电信号的方式传送给控制器,控制器计算出当前总重量后通过调节电机调节并联弹簧的预紧力大小;步骤3:控制器接收电位计传送的电信号以获取踝关节的角度信息,控制器接收第一压力传感器和第二压力传感器传送的电信号以获取踝关节与地面接触情况的信息;步骤4:控制器通过步骤3获取的信息来判断当前踝关节处于何种步态阶段;步骤5:控制器继续由当前踝关节角度判断出当前需要向踝关节所施加的力矩,从而控制驱动电机产生力矩,完成对佩戴者踝关节的助力;步骤6:重复步骤3、步骤4、步骤5,直至佩戴者停止行走;步骤7:关闭控制器,佩戴者脱下外骨骼。
14.在步骤4中,当控制器判断当前步态为摆动阶段或控制性足底屈曲阶段时,控制器控制驱动电机实施零力矩控制;当控制器判断当前步态为控制性背屈阶段时,控制器控制驱动电机施加与此时踝关节转动方向相反的顺时针力矩,辅助踝关节做负功;当控制器判断当前步态为动力足底屈曲阶段时,控制器控制驱动电机施加与此时踝关节转动方向相同的顺时针力矩,辅助踝关节做正功。
15.由上述方法可知,该方法不仅可以辅助踝关节做正功、负功,还可以将控制性背屈阶段踝关节产生的部分负功利用并联弹簧收集起来,并在动力足底屈曲阶段释放出来辅助踝关节作正功。同时该方法利用扭矩传感器形成闭环控制可以更加精确的为踝关节提供合适的扭矩。
附图说明
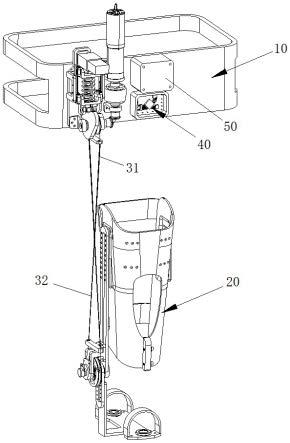
16.图1是本发明的结构示意图。
17.图2是本发明驱动装置的整体结构示意图。
18.图3是本发明驱动装置的局部结构示意图一。
19.图4是图3的剖面结构示意图。
20.图5是本发明驱动装置的局部结构示意图二。
21.图6是本发明驱动装置的局部结构示意图三。
22.图7是图6的分解结构示意图。
23.图8是本发明踝关节执行装置的整体结构示意图。
24.图9是本发明踝关节执行装置的局部分解示意图。
25.图10是本发明踝关节执行装置的剖面结构示意图。
26.图11是本发明的机械原理简化图。
27.图12是本发明凸轮的结构示意图。
28.图13是本发明的方法流程图。
29.上述附图中的标记为:驱动装置10、腰部固定板101、第一主轴102、第一滑轮103、第一锥齿轮104、第二锥齿轮105、力矩传感器106、驱动电机107、第一导轨1081、第二导轨1082、第一滑板109、第二滑板110、并联弹簧111、调节电机112、凸轮113、滚子114、柔性绑带115、第一滑块116、第二滑块117、导轨固定架118、电机固定板119、第一弹簧定位座120、第二弹簧定位座121、驱动电机座122、力矩传感器轴承座123、第一轴承座124、第二轴承座125、第三轴承座126、第四轴承座127、第一鲍登线固定板128、踝关节执行装置20、小腿板201、小腿支架202、踝板203、足部支架204、第二主轴205、小腿板固定轴承座206、第二滑轮207、电位计208、第一压力传感器209、第二压力传感器210、第二鲍登线固定板211、电位计安装板212、第一鲍登线31、第二鲍登线32、控制器40、供电电池50、非线性并联弹性机构60、自适应非线性并联弹性机构70、自适应非线性并联弹性驱动器80。
具体实施方式
30.下面结合附图对本发明做进一步说明:如图1所示的一种基于自适应非线性并联弹性驱动器的踝关节助力外骨骼,包括固定在人体腰部的驱动装置10以及固定在小腿与足部的踝关节执行装置20,驱动装置10与踝关节执行装置20通过鲍登线连接并实现传动。其中:驱动装置10可以为整个外骨骼提供动力,踝关节执行装置20是整个外骨骼的执行器部分,鲍登线作为一种柔性的传动手段,可以将力与运动在腰部驱动装置与踝关节执行装置之间传递。本实施例仅示意出与一侧小腿相配合的踝关节执行装置20,另一侧的与之对称,在图中未显示。
31.进一步的,如图2~图7所示,驱动装置10包括腰部固定板101,腰部固定板101通过柔性绑带115固定在腰间,腰部固定板101上设有水平方向布置的第一主轴102,第一主轴102上同轴固定有第一滑轮103与第一锥齿轮104,第一锥齿轮104依次通过第二锥齿轮105、力矩传感器106与驱动电机107相连。具体的,驱动电机107通过驱动电机座122固定在腰部固定板101上,驱动电机107的输出轴与力矩传感器106固连,力矩传感器106的输出轴与第二锥齿轮105同轴固连,力矩传感器106的输出轴通过轴承与力矩传感器轴承座123相配合
形成转动副,力矩传感器轴承座123固定在腰部固定板101上,驱动电机107的输出轴、力矩传感器106、第二锥齿轮105同轴设置且同步转动。力矩传感器106负责测量驱动电机107输出的力矩并将力矩转化为电信号反馈给控制器,以形成闭环的、稳定的力矩控制。驱动电机107的输出力矩通过力矩传感器106传输到第二锥齿轮105上,驱动电机107的内部集成有驱动电机编码器以便对其进行信息采集和控制。本实施例中,第一锥齿轮104与第二锥齿轮105的传动比为1:1。
32.驱动装置还包括凸轮机构以及变刚度机构,变刚度机构包括竖直方向设置的导轨、呈上下方向设置在导轨上的第一滑板109及第二滑板110、设置在第一滑板109及第二滑板110之间的并联弹簧111以及与第一滑板109相连的调节电机112,并联弹簧111为刚度固定的线性弹簧,凸轮机构包括固定在第一主轴102上的凸轮113以及固定在第二滑板110底部的滚子114。
33.人体的步态周期可大致分为摆动(sw)、控制性足底屈曲(cp)、控制性背屈(cd)、动力足底屈曲(pp)四个阶段,本发明中凸轮113的曲线分别与这四个阶段相对应。凸轮113与滚子114的接触点在步态周期的四个阶段中的变化如图12所示:cp阶段踝关节顺时针转动,在这一阶段凸轮113轮廓曲线离圆心的距离不变,即凸轮113不会压迫滚子114与第二滑板110运动,所以并联弹簧111长度不变。由于在这一阶段滚子114作用在凸轮113上的力垂直指向凸轮圆心,所以自适应非线性并联弹性机构在这一阶段输出的力矩为零。cd阶段踝关节逆时针转动,在这一阶段凸轮轮廓曲线离圆心的距离逐渐变大,凸轮113处于升程,即凸轮113压迫滚子114与第二滑板110向上运动,所以并联弹簧111受压缩长度变短,这一阶段可以认为凸轮113是主动件,滚子114是从动件。在这一阶段滚子114作用在凸轮113上的力不垂直指向凸轮圆心,所以自适应非线性并联弹性机构在这一阶段可以输出大小非零的力矩并且其方向与踝关节运动方向相反,与踝关节生物力矩方向相同,辅助踝关节做负功。与此同时,踝关节在cd阶段产生的部分负功被收集到并联弹簧111中去。pp阶段踝关节顺时针转动,在这一阶段凸轮轮廓曲线离圆心的距离逐渐变小,凸轮113处于回程,即并联弹簧111压迫滚子114与第二滑板110向下运动,此时被压缩的并联弹簧111长度逐渐恢复,在这一阶段可以认为滚子114是主动件,凸轮113是从动件。在这一阶段滚子114作用在凸轮113上的力不垂直指向凸轮圆心,所以自适应非线性并联弹性机构在这一阶段可以输出大小非零的力矩并且其方向与踝关节运动方向相同,与踝关节生物力矩方向同,辅助踝关节做正功。与此同时,并联弹簧111在cd阶段收集的负功被释放出来为踝关节提供正功。sw阶段踝关节逆时针转动,在这一阶段凸轮轮廓曲线离圆心的距离不变,即凸轮113不会压迫滚子114与第二滑板110运动,所以并联弹簧111长度不变。由于在这一阶段滚子114作用在凸轮113上的力垂直指向凸轮圆心,所以自适应非线性并联弹性机构在这一阶段输出的力矩为零。
34.具体的,第一主轴102通过一对轴承安装于第一轴承座124与第二轴承座125之间并形成转动副,凸轮113、第一滑轮103、第一锥齿轮104与第一主轴102同轴固定且同步转动,第一轴承座124及第二轴承座125均与腰部固定板101相连;滚子114通过一对轴承安装于第三轴承座126与第四轴承座127之间并形成转动副,第三轴承座126与第四轴承座127固定在第二滑板110的底面。
35.导轨包括平行布置的第一导轨1081和第二导轨1082,第一滑板109的两端分别通过第一滑块116与第一导轨1081、第二导轨1082形成滑动配合,第二滑板110的两端分别通
过第二滑块117与第一导轨1081、第二导轨1082形成滑动配合,第一导轨1081与第二导轨1082分别通过导轨固定架118与腰部固定板101连接,调节电机112位于第一滑板109的上方,且调节电机112通过电机固定板119安装在腰部固定板101上,调节电机112的输出轴为螺纹轴,第一滑板109上设有与调节电机112的输出轴形成螺纹螺杆传动的螺纹孔,调节电机112输出轴的转动被转化为第一滑板109沿第一导轨1081和第二导轨1082限定方向的滑动。调节电机112的内部集成有调节电机编码器以便对其进行信息采集和控制。
36.第一滑板109与第二滑板110相靠近的板面分别设有轴线相吻合的第一弹簧定位座120与第二弹簧定位座121,并联弹簧111的两端分别抵靠在第一滑板109与第二滑板110的板面上。
37.进一步的,如图8~图10所示,踝关节执行装置20包括竖直方向设置的小腿板201、固定在小腿板201上的小腿支架202、与小腿板201转动连接的踝板203以及固定在踝板203上的足部支架204,使用时,小腿支架202穿戴在小腿上,足部支架204穿戴在脚上。
38.踝关节执行装置20还包括水平设置的第二主轴205,第二主轴205通过一对轴承安装于小腿板201与小腿板固定轴承座206之间并形成转动副,小腿板固定轴承座206与小腿板201螺栓连接,第二主轴205上同轴固定有第二滑轮207及踝板203,第二主轴205远离小腿板201的一端设有电位计208,足部支架204上设有与人体足部脚尖位置相对应的第一压力传感器209以及与人体足部脚跟位置相对应的第二压力传感器210。也就是穿戴完毕后,人体足部的脚尖位置位于第一压力传感器209之上,人体足部的脚跟位置位于第二压力传感器210之上。第一压力传感器209与第二压力传感器210的作用如下:一是用于检测人体步行时脚跟与地面撞击发生的时间点和脚尖与离开地面时的时间点,配合电位计208可以使控制器40判断出踝关节正处于步态周期的哪个阶段以便做出相对应的助力策略;二是可以检测人体步行时与地面产生的地面反作用力的峰值大小,这样可以使控制器判断出佩戴者与自身负重之和的总重量大小,从而通过控制调节电机112来控制并联弹簧111的预紧力大小,这样可以改变并联弹簧在步态周期中对踝关节产生的助力力矩的大小。
39.并联弹簧111预紧力调整的原理为:由于并联弹簧111上端连接第一滑板109,下端通过第二滑板110连接滚子114,所以并联弹簧111的预紧力取决于第一滑板109的位置,第一滑板109位置越靠下,并联弹簧111的预紧力越大。调节电机112的输出轴由于与第一滑板109中行的螺纹孔形成螺纹螺杆传动,所以调节电机112输出轴的转动可经过螺纹螺杆传动转化为第一滑板109上下方向的移动,这样就改变了第一滑板109的位置,从而改变了并联弹簧111的预紧力大小。
40.例:我们的外骨骼可以适应佩戴者体重与自身负重之和的总重量为50kg到85kg的佩戴者。即总重量为50kg时,并联弹簧111的预紧力为零,即总重量为85kg时,并联弹簧111的预紧力为最大;总重量为在这一范围内,其预紧力大小随佩戴者体重及负重总和的大小线性变化;若总重量小于50kg,预紧力仍然为零,总重量大于85kg时,预紧力依然为最大。
41.电位计208固定在电位计安装板212上,电位计安装板212通过螺钉和小腿板固定轴承座206连接。具体的,电位计208的左右两端可进行相对转动,电位计208的左端通过螺纹配合和电位计安装板212固定连接,电位计208的右端通过过盈配合与第二主轴205左端的孔位固定连接。电位计208可以通过两端的相对转角来输出对应的电信号,这样的安装方式使得控制器40由电位计208传递来的电信号获取小腿板201与踝板203之间的相对角度,
从而获得人体小腿和足部之间的相对角度,即踝关节转角。
42.进一步的,鲍登线连接第一滑轮103及第二滑轮207,第一滑轮103与第二滑轮207同步转动且转向相反。
43.具体的,鲍登线包括第一鲍登线31及第二鲍登线32,第一鲍登线31及第二鲍登线32的两端均分别与第一滑轮103和第二滑轮207固连,腰部固定板101上还设有第一鲍登线固定板128,小腿板固定轴承座206上设有第二鲍登线固定板211,第一鲍登线固定板128与第二鲍登线固定板211用于固定第一鲍登线31及第二鲍登线32中的外套。即第一鲍登线31内部芯线的顶端与第一滑轮103固连,第一鲍登线31内部芯线的底端与第二滑轮207固连,起保护作用的外套顶端与第一鲍登线固定板128连接固定,外套底端与第二鲍登线固定板211连接固定。第二鲍登线32的结构与第一鲍登线31相同,在此不再赘述。
44.腰部固定板101上还设有控制器40及供电电池50,电位计208、第一压力传感器209、第二压力传感器210、驱动电机107、调节电机112分别与控制器40相连。
45.如图11所示,在本发明中,凸轮113与滚子114形成凸轮机构,凸轮机构可以使凸轮113绕第一主轴102的转动转化为滚子114沿第一导轨1081、第二导轨1082的滑动,也可以使滚子114沿第一导轨1081、第二导轨1082的滑动转化为凸轮113绕第一主轴102的转动。
46.在本发明中,凸轮机构与并联弹簧111形成非线性并联弹性机构60,并联弹簧111是刚度固定的线性弹簧,输出的力随位移的变化是线性的,本发明中凸轮113设计的轮廓曲线可以使并联弹簧111刚度固定的线性的力输出转化为凸轮113刚度变化的非线性的力矩输出,这样一条随角度变化的非线性力矩曲线与人体踝关节的生物力矩曲线更加吻合,不仅提高了穿戴者的舒适性,还提高了外骨骼驱动器的能量效率。
47.在本发明中,非线性并联弹性机构60与调节电机112形成自适应非线性并联弹性机构70,这里的自适应是指非线性并联弹性机构60所输出的力矩曲线大小可以在一定程度上随佩戴者体重及负重总和的增加而增加、随体重及负重总和的减小而减小,具体方法是调节电机112螺纹螺杆机构调节并联弹簧111预紧力的大小,从而在一定程度上调整非线性并联弹性机构60随角度变化的非线性输出力矩的大小。
48.在本发明中,自适应非线性并联弹性机构70与驱动电机107形成自适应非线性并联弹性驱动器80,它是外骨骼的驱动单元,负责给人体踝关节施加力矩,辅助人体行走。驱动电机107与非线性并联弹性机构并联,自适应非线性并联弹性驱动器80输出的总力矩是非线性并联弹性机构70的输出力矩与驱动电机107输出力矩之和,即驱动装置10所产生的力矩由自适应非线性并联弹性驱动器80提供。
49.在本发明中,第一滑轮103与第二滑轮207形成一个滑轮组,第一滑轮103与第二滑轮207通过鲍登线连接,它可以是第一滑轮103带动第二滑轮207转动,也可以是第二滑轮207带动第一滑轮103转动。
50.本发明中整个外骨骼机械部分向人体踝关节施加力矩的过程可以看作是自适应非线性并联弹性驱动器80产生力矩,经由滑轮组通过鲍登线将力矩传递到踝关节执行装置20,最后由踝关节执行装置20将力矩传递给人体踝关节,从而实现对人体踝关节的助力。
51.本发明的工作原理及工作过程如下:人体步行的每个步态周期包括两个主要阶段:站立阶段和摆动阶段。站立阶段开始于脚跟着地,结束于脚尖离地。站立阶段又可分为三个子阶段,即控制性足底屈曲、控制
性背屈、动力足底屈曲。所以总的来说,人体步态可大致分为摆动(sw)、控制性足底屈曲(cp)、控制性背屈(cd)、动力足底屈曲(pp)四个阶段。以动力足底屈曲阶段踝关节运动的方向为顺时针对步态进行分析;则在摆动阶段,踝关节产生较大幅度逆时针转动并产生几乎为0的微小力矩;在控制性足底屈曲阶段,踝关节小幅度顺时针转动并产生微小力矩;在控制性背屈阶段,踝关节产生大约15
°
的大幅度逆时针转动并产生峰值较大的力矩,在这个阶段,踝关节产生大量负功,力矩方向与踝关节转动方向相反;在动力足底屈曲阶段,踝关节产生大约30
°
的大幅度顺时针转动并产生峰值较大的力矩,在这个阶段,踝关节产生大量正功,力矩方向与踝关节转动方向相同。因此,本发明的助力方案是在踝关节力矩较小的摆动阶段和控制性足底屈曲阶段进行零力矩控制,而在控制性背屈、动力足底屈曲阶段施加与踝关节力矩方向相同的力矩以达到助力踝关节的目的。
52.在外骨骼穿戴完毕后,控制器首先通过第一压力传感器及第二压力传感器传送的电信号计算出当前佩戴人员体重及负重的总重量和,然后根据总重量控制调节电机转动从而控制并联弹簧的预紧力大小。调节电机的转动可以调整第二滑板的位置从而改变并联弹簧预紧力的大小,从而调整自适应非线性并联弹性机构输出的力矩大小,自适应非线性并联弹性驱动器输出力矩曲线的大小也会随之变化。其次,控制器根据电位计反馈的电信号获取踝关节角度信息、根据第一力矩传感器及第二力矩传感器的电信号获取踝关节与地面接触情况信息,从而判断踝关节处于步态的哪个阶段。判断出踝关节处于步态的哪个阶段后,控制器可继续由当前踝关节角度判断出当前需要向踝关节所施加的力矩,从而控制驱动电机产生力矩。步态各阶段的具体分析如下:当目前处于摆动阶段与控制性足底屈曲阶段时,控制器控制驱动电机实施零力矩控制,此时外骨骼对佩戴者的踝关节没有施加力矩,即外骨骼在这两个阶段输出在人体踝关节处的总力矩为零。具体的:驱动电机通过第二锥齿轮和第一锥齿轮传递到第一主轴上的输出力矩为零;与此同时,凸轮虽然转动,但并未压迫滚子沿着第一导轨、第二导轨滑动,所以并联弹簧通过第二滑板、滚子、凸轮传递到第一主轴上的输出力矩为零;所以驱动装置输出的总力矩为零;总力矩通过第一主轴上的第一滑轮及鲍登线传递到第二滑轮上,最终传递到踝关节处。
53.当目前处于控制性背屈阶段时,控制器控制驱动电机施加与此时踝关节转动方向相反的顺时针力矩,与驱动电机并联的自适应非线性并联弹性机构也施加与此时踝关节转动方向相反的顺时针力矩,二者共同辅助踝关节做负功。这里的做负功是指在控制性背屈阶段时,踝关节生物学力矩与踝关节转动方向相反,在这一阶段踝关节需要做负功,所以外骨骼在这个阶段施加给踝关节与其转动方向相反的扭矩,辅助其做负功。具体的:在此阶段,人体踝关节逆时针转动,从而带动第二滑轮转动,并通过鲍登线、第一滑轮将力矩与运动传递到第一主轴上;此时第一主轴转动,带动凸轮转动,迫使滚子沿着第一导轨、第二导轨向上滑动,这导致并联弹簧受力逐渐被压缩,踝关节的一部分负功被储存在并联弹簧中。由于力的作用是相互的,并联弹簧通过第二滑板、滚子、凸轮、第一主轴、第一滑轮、鲍登线、第二滑轮将与踝关节运动方向相反的力矩传递到人体踝关节处;与此同时,驱动电机同样输出与转动方向相反的力矩,力矩通过第二锥齿轮、第一锥齿轮、第一主轴、第一滑轮、鲍登线、第二滑轮将与踝关节运动方向相反的力矩传递到人体踝关节处;此时外骨骼施加在佩戴者踝关节处的力矩等于自适应非线性并联弹性机构产生的力矩和控制驱动电机产生的
力矩之和;所以驱动装置输出的总力矩与踝关节转动方向相反;所以外骨骼整体辅助踝关节做负功。
54.当目前处于动力足底屈曲阶段时,控制器控制驱动电机施加与此时踝关节转动方向相同的顺时针力矩,与驱动电机并联的自适应非线性并联弹性机构也施加与此时踝关节转动方向相同的顺时针力矩,二者共同辅助踝关节做正功。具体的:在此阶段,人体踝关节顺时针转动,此时被压缩的并联弹簧逐渐被释放,将并联弹簧在控制性背屈阶段储存的踝关节负功释放出来;并联弹簧通过第二滑板、滚子、凸轮传递到第一主轴上的输出力矩与其转动方向相同,驱动电机与自适应非线性并联弹性机构并联组成自适应非线性并联弹性驱动器,此时外骨骼施加在佩戴者踝关节处的力矩等于自适应非线性并联弹性机构产生的力矩和控制驱动电机产生的力矩之和,驱动电机通过第二锥齿轮和第一锥齿轮传递到第一主轴上的力矩与其转动方向相同;总力矩通过第一主轴上的第一滑轮、鲍登线传递到第二滑轮上,最终传递到踝关节处,此时该力矩与踝关节转动方向相同,辅助踝关节做正功。
55.如图13所示,本发明还提供了一种基于自适应非线性并联弹性驱动器的踝关节助力外骨骼的控制方法,包括如下步骤:步骤1:佩戴者穿戴外骨骼,控制器开始工作,进行系统初始化;步骤2:第一压力传感器及第二压力传感器将佩戴者与自身负重之和的总重量以电信号的方式传送给控制器,控制器计算出当前总重量后通过调节电机调节并联弹簧的预紧力大小;步骤3:控制器接收电位计传送的电信号以获取踝关节的角度信息,控制器接收第一压力传感器和第二压力传感器传送的电信号以获取踝关节与地面接触情况的信息;步骤4:控制器通过步骤3获取的信息来判断当前踝关节处于何种步态阶段;步骤5:控制器继续由当前踝关节角度判断出当前需要向踝关节所施加的力矩,从而控制驱动电机产生力矩,完成对佩戴者踝关节的助力;步骤6:重复步骤3、步骤4、步骤5,直至佩戴者停止行走;步骤7:关闭控制器,佩戴者脱下外骨骼。
56.进一步的,以动力足底屈曲阶段踝关节运动的方向为顺时针对步态进行分析;在步骤4中,当控制器判断当前步态为摆动阶段或控制性足底屈曲阶段时,控制器控制驱动电机实施零力矩控制,非线性并联弹性机构输出力矩也为零,所以外骨骼输出的总力矩为零。这里的零力矩控制是指外骨骼在摆动阶段和控制性足底屈曲阶段输出在人体踝关节处的总力矩为零,即外骨骼利用力矩传感器测得驱动电机的实际输出扭矩,在摆动阶段和控制性足底屈曲阶段通过闭环控制来控制驱动电机的输出扭矩,使其输出扭矩为零。
57.当控制器判断当前步态为控制性背屈阶段时,控制器控制驱动电机施加与此时踝关节转动方向相反的顺时针力矩,非线性并联弹性机构输出与此时踝关节转动方向相反的顺时针力矩,外骨骼输出的总扭矩与踝关节转动方向相反;此时外骨骼辅助踝关节做负功。这里的做负功是指在控制性足底屈曲阶段时,踝关节生物学力矩与踝关节转动方向相反,在这一阶段踝关节需要做负功,所以外骨骼在这个阶段施加给踝关节与其转动方向相反的扭矩,辅助其做负功。
58.当控制器判断当前步态为动力足底屈曲阶段时,控制器控制驱动电机施加与此时踝关节转动方向相同的顺时针力矩,非线性并联弹性机构输出与此时踝关节转动方向相同
的顺时针力矩,外骨骼输出的总扭矩与踝关节转动方向相同;此时外骨骼辅助踝关节做正功。这里的做正功是指在动力足底屈曲阶段时,踝关节生物学力矩与踝关节转动方向相同,在这一阶段踝关节需要做正功,所以外骨骼在这个阶段施加给踝关节与其转动方向相同的扭矩,辅助其做正功。
59.本发明的有益效果在于:1)利用自适应非线性并联弹性机构与驱动电机107组成的自适应非线性并联弹性驱动器,可以在助力踝关节时产生比单一驱动电机所组成的驱动器更大的峰值功率与辅助力矩。
60.2)利用了踝关节在控制性背屈阶段会产生大量负功的生物力学特性,将这一阶段踝关节产生的负功储存在自适应非线性并联弹性机构中的并联弹簧中,并在踝关节动力足底屈曲阶段释放出来以辅助踝关节做正功。相比较单一驱动电机所组成的驱动器,这样的作法降低了驱动电机在每个步态周期中所需作的总功,降低了整个外骨骼的平均电功率,使外骨骼有更好的续航能力。
61.3)利用线性的并联弹簧与凸轮机构组成的非线性并联弹性机构与单纯的线性的并联弹簧相比,可以产生更加贴合踝关节生物力矩曲线的角度-力矩曲线。这样做不仅可以产生更加贴合踝关节生物力矩曲线的输出力矩,在助力时使佩戴者更舒适,还可以更加高效的吸收踝关节在控制性背屈阶段时产生的大量负功。
62.4)利用调节电机与非线性并联弹性机构组成的自适应非线性并联弹性驱动器可以通过控制小功率的调节电机来控制非线性并联弹性机构中并联弹簧的预紧力,这样可以在一定程度内调整非线性并联弹性机构的输出力矩大小,从而影响外骨骼施加在踝关节处的力矩大小。通过穿戴者与自身负重之和的总重量的大小来调节并联弹簧的预紧力大小,从而达到自适应的目的。
63.5)本发明利通过用扭矩传感器形成闭环控制可以更加精确的为踝关节提供合适的扭矩。
64.6)由于并联弹簧本质上与驱动电机属于并联关系,二者共同为踝关节提供力矩,所以并联弹簧降低了外骨骼对驱动电机的扭矩需求与功率要求,这使得驱动电机可以选择功率更小的型号,在整体上降低了外骨骼的重量;由于并联弹簧同时与电机为踝关节提供正功与负功,降低了驱动电机在步态周期中做功的总量,提高了外骨骼的能量效率,这种设计可以让外骨骼在工作中消耗的电量大大降低,减少了了外骨骼对大容量电池的依赖,小容量的电池可以降低外骨骼的重量并提高外骨骼的续航能力。
65.7)本发明可以根据佩戴者及其负重的总质量调整并联弹簧预紧力的大小。由于并联弹簧所属的自适应非线性并联弹性机构与驱动电机本质属于并联关系,二者提供的力矩之和等于外骨骼驱动装置的输出力矩。当佩戴者的总重量越大,调节电机会使得并联弹簧的预紧力增大,并联弹簧的预紧力增大会使得自适应非线性并联弹性机构输出的力矩增大,从而使外骨骼驱动装置的输出力矩增大。这种根据不同佩戴者及其负重的总重量和为佩戴者提供自适应的力矩输出的方法可以为不同的个体、不同的使用环境提供更适合的辅助效果。
66.以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方
案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1