用于煤仓的巡检机器人的制作方法
【】本发明涉及一种用于煤仓的巡检机器人领域,具体涉及无人巡检机器人。
背景技术
0、
背景技术:
1、煤通常利用封闭的煤仓来储存。一方面,储存的煤堆有自燃的风险,尤其是在散热条件差的时候,热量积累会提升煤堆温度,煤温度越高氧化反应就越剧烈,氧化反应速度越快、放热越多,煤越易自燃。因此有必要对储煤进行监测,从而在储煤中发生自燃时及时采取措施,以确保煤仓安全和减少储煤自燃损失。另一方面,煤仓在制造和使用过程中可能会产生裂缝和磨损,这可能与制造工艺相关,也可能与内外温差导致的内应力有关,这会导致储煤的品质和安全性下降。因此有必要对煤仓的内壁的状态进行监测,从而在仓壁发生不期望的损坏时及时修复,以确保煤仓安全和减少损失。
2、在现有技术中,由于煤仓是封闭的,通常难以对煤仓内部的仓壁损坏情况、仓内壁挂煤情况、仓内的环境湿度、仓内煤的温度、仓内煤堆积情况、有害气体分布情况等进行巡检,只有在发生仓体破损、煤高温自燃、有害气体溢出等情况时才能发现异常。这会引起安全风险并且会导致损失。虽然也存在人工巡检的情况,但是人工巡检通常频次低,对仓内情况无法清楚掌握,而且还存在安全风险。
3、鉴于以上情况,亟需研究用于煤仓的巡检机器人,该巡检机器人可进入煤仓对煤仓内部进行无人巡检并且在检测到异常情况时自动报警,由此能够及时地了解煤仓内的情况、尤其是异常情况,从而及早地采取干预措施以降低发生危险情况的风险并且保护煤仓不受到破坏性地损害。
技术实现思路
0、
技术实现要素:
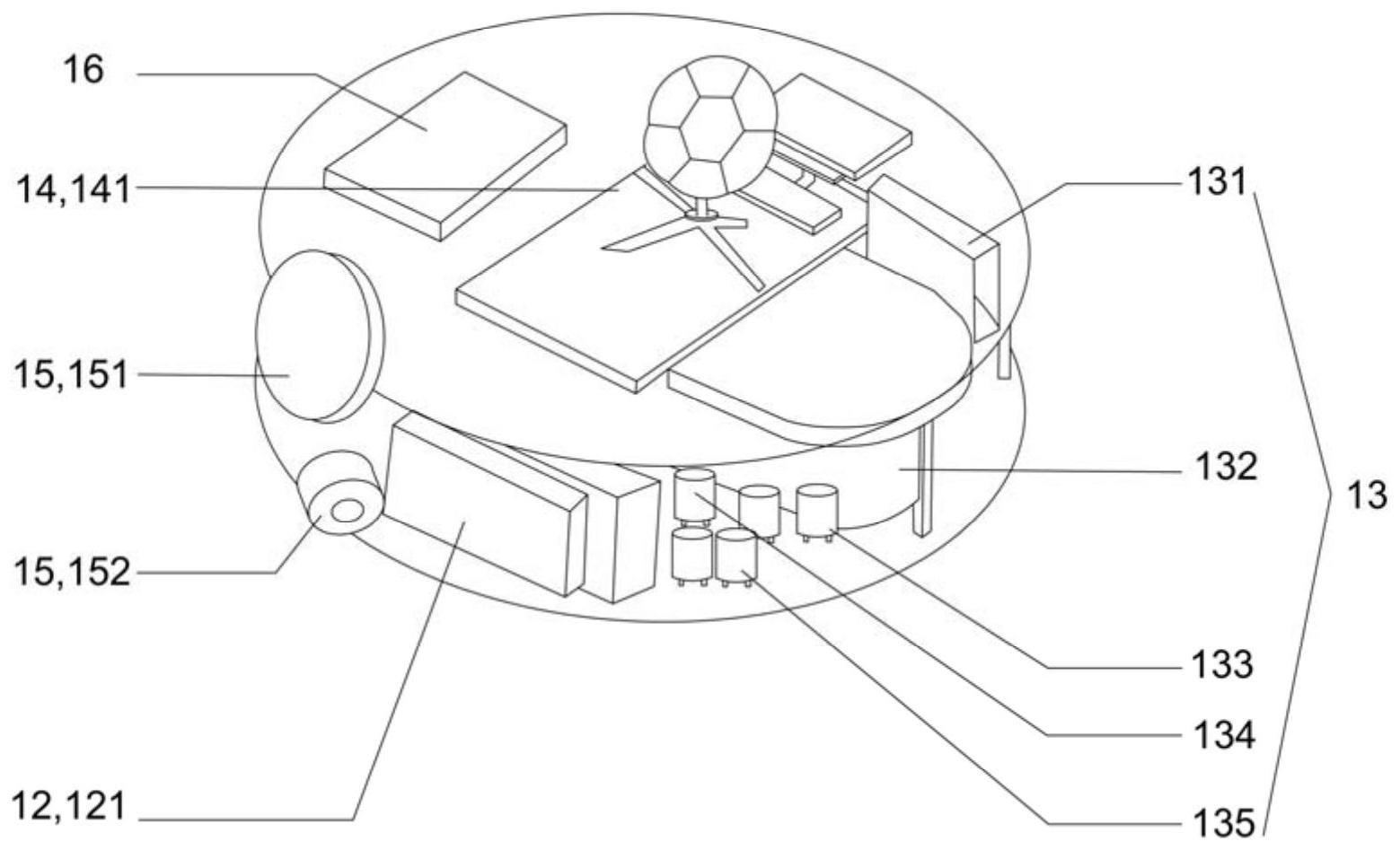
1、本发明提出了一种用于煤仓的巡检机器人,所述巡检机器人被构造用于对煤仓情况进行检测并且针对异常情况发送警报,所述巡检机
2、器人包括:框架壳体,在所述框架壳体的外壁上构造有连接件,所述连5接件与支承在煤仓的仓体上的运动系统连接以使得所述巡检机器人
3、能够在煤仓内运动;以及附接在所述框架壳体处或者容纳在所述框架壳体的内部的功能模块,所述功能模块又包括:电源模块,所述电源模块设计用于为所述巡检机器人供电;数据采集模块,所述数据采集
4、模块包括内部数据采集单元和外部数据采集单元,所述内部数据采集0单元设计用于采集用于描述所述巡检机器人内部各个功能模块的状态的内部状态数据,所述外部数据采集单元设计用于采集用于描述所述煤仓的仓体的内壁的状态和煤仓内部的状态的外部状态数据;数据传输模块,所述数据传输模块包括内部数据传输单元和外部数据传输
5、单元,其中所述内部数据传输单元设计用于在所述巡检机器人内部传5输数据,所述外部数据传输单元设计用于在所述巡检机器人与外部系
6、统之间传输数据;警报模块,所述警报模块设计用于发送警报;控制模块,所述控制模块包括数据信息部、决策控制部和执行控制部,所述数据信息部设计用于接收并存储由所述数据采集模块所采集的状
7、态数据以及可供所述决策控制部调用的决策数据,所述决策数据包括0预先给定的执行步骤、限定出正常范围的内部状态阈值数据和外部状态阈值以及算法数据;所述决策控制部设计用于根据所述状态数据和决策数据产生执行指令;所述执行控制部设计用于接收执行指令并且根据所述执行指令对所述数据采集模块、警报模块和/或所述运动系统
8、进行操控;其中所述决策控制部在产生所述执行指令时将所述内部状5态数据与所述外部状态数据结合在一起考虑,其中所述决策控制部在所述内部状态数据超出所述内部状态阈值数据所限定的正常范围时定位发生异常的功能模块,并且在所定位的发生异常的功能模块涉及外部状态数据时取消所涉及的外部状态数据与相应的外部状态阈值
9、的比较,并且产生与所定位的发生异常的功能模块相关的警报信息以0及通过所述警报模块发送所述警报信息的执行指令。
10、根据本发明的巡检机器人能够及时并且准确地识别出自身的异常情况和煤仓中的异常情况,从而使得工作人员能够基于准确的信息做出及时而恰当的应对,而不会由于未能识别到煤仓异常情况而导致危险或者损失或者由于自身异常而导致对煤仓情况的误识别从而引起不必要的警报和不恰当的应对措施。
11、在一些技术方案中,所述巡检机器人还包括防爆补光灯,所述防爆补光灯设计用于根据由所述控制模块或者所述外部系统发出的执行指令提供可调节的光照。这对于采集图像数据和工人维修尤其有利。虽然巡检机器人能够借助激光雷达和/或红外成像仪等设备对仓壁进行三维建模并且获取仓壁的裂缝、磨损和/或挂煤情况,但是仍然存在仓壁的局部状态无法被清楚识别的可能性。当控制模块在处理图像数据、例如建模时发现仓壁的局部状态没有被清楚地识别时,能够通过执行控制部激活防爆补光灯并且对相应的局部进行重新采样。在这种情况下尤其有利的是,在通过内部状态数据确认巡检机器人内部无异常的情况下再激活防爆补光灯。此外还有利的是,在人工检修时,巡检机器人上所配置的防爆补光灯还能够为工人提供足够的光照,提高作业效率。这里的防爆补光灯具有防爆配置,从而适用于煤仓这种易于爆燃的作业环境。
12、在一些技术方案中,所述防爆补光灯固定在第一可移动机构的自由移动端上,所述第一可移动机构附接在所述框架壳体处或者所述框架壳体内的功能模块处并且所述第一可移动机构的自由移动端能够根据由所述控制模块或者所述外部系统发出的执行指令移动。这使得光照能够被提供到更多的位置、例如巡检机器人所不能到达的角落等。
13、在一些技术方案中,所述数据采集模块包括多个传感器和第二可移动机构,其中所述多个传感器中的至少部分传感器固定在所述第二可移动机构的自由移动端上,所述第二可移动机构附接在所述框架壳体处或者所述框架壳体内的功能模块处并且能够根据由所述控制模块或者所述外部系统发出的执行指令移动、尤其移动到所述框架壳体之外。第二可移动机构能够保证传感器在巡检机器人的存储运输过程中不会被损坏,而在巡检机器人的运行过程中能够灵活地到达更多的位置,从而提供更加准确的检测数据。
14、在一些技术方案中,所述外部数据采集单元包括激光雷达、红外成像仪、气体传感器、烟雾传感器、温度传感器、湿度传感器、图像采集器中的一个或多个。激光雷达和/或红外成像仪能够用于对煤仓内壁和/或煤堆进行建模、尤其是三维建模,对煤仓内壁的裂缝及磨损情况进行监测和标记。其中,红外成像仪尤其被用于发现那些较为隐蔽的裂缝,从而提高监测和建模精度。气体传感器能够包括一氧化碳探测器、二氧化碳探测器、甲烷探测器等。作为分开使用的温度传感器和湿度传感器的替代,还可以使用集成的温湿度传感器。特别有利的是,所述图像采集器设计用于采集有关煤仓的仓体的内壁挂煤状态的数据并且与所述防爆补光灯配合工作。所述图像采集器能够与所述防爆补光灯集成在一起。由此,所述图像采集器作为激光雷达和红外成像仪的补充获取重要位置的确切数据,这尤其有利于获取仓壁挂煤的状态。
15、在一些技术方案中,所述决策数据还包括高优先级指令数据,所述高优先级指令数据由所述外部系统产生并且借助于所述外部数据传输单元发送到所述数据信息部并且存储在那里,当所述决策控制部从所述数据信息部调用数据时优先调用所述高优先级指令数据并且将其传输给所述执行控制部。由所述数据采集单元所采集的数据能够同时通过外部数据传输单元传输到外部系统中。外部系统的数据处理算法能够是可编辑的。外部系统提供了一种人机互动途径,从而能够根据用户的个性化需求实时地干涉煤仓内的巡检机器人。外部系统发送给巡检机器人的高优先级指令数据会被优先读取并且执行,从而能够在预先给定的执行步骤中插入临时的执行要求。这提高了巡检机器人的可控性和适应性。
16、在一些技术方案中,所述煤仓的仓体的内壁的状态包括仓体的内壁的几何形状、裂缝状态、磨损状态和仓壁挂煤情况中的一个或多个。这些状态数据有助于用户了解煤仓自身的情况,从而及时采取修缮措施。
17、在一些技术方案中,所述煤仓内部的状态包括储煤料位、储煤温度、储煤湿度、仓内气体成分及含量中的一个或多个。这些状态数据有助于用户了解煤仓内部储煤的情况,从而及时避免自燃或者降低自燃程度。
18、在一些技术方案中,所述警报模块还包括用于与外界通讯的通讯单元。所述通讯单元包括拾音器和扬声器,从而实现了煤仓现场与远程控制端的通讯。这对于技术人员远程指导现场维修工人进行维修等非常有利。
19、在一些技术方案中,电源模块包括蓄电池单元和外接电源连接单元。蓄电池单元能够为巡检机器人的运行提供一定时间段的电量。当需要巡检机器人长时间巡检时,还可利用外接电源连接单元与外接电源连通,从而使得巡检机器人直接外接电源运行或者对蓄电池进行充电,以延长巡检运行时间。由此提供了可选的蓄电池供电和外接电源供电双重模式。
20、通过使用根据本发明的巡检机器人,一方面改善了对煤仓的监控水平,提高了煤仓安全性、降低甚至避免了仓储损失;另一方面也提升了智能化安全管理水平,使巡检岗位人员能够规避严寒酷暑,从目前的“岗位盯守”向“远程监视”进行转变,减少员工的工作量,降低工作风险、提高工作效率。
- 还没有人留言评论。精彩留言会获得点赞!